1.插值概念解理解:
插值:插值指利用已知的点来“猜”未知的点,图像领域插值常用在修改图像尺寸的过程,由旧的图像矩阵中的点计算新图像矩阵中的点并插入,不同的计算过程就是不同的插值算法。
单线性插值:
就是求一个区间中的值,例如求P1跟P2中间P的值,P1到P2的区间是线性过渡的。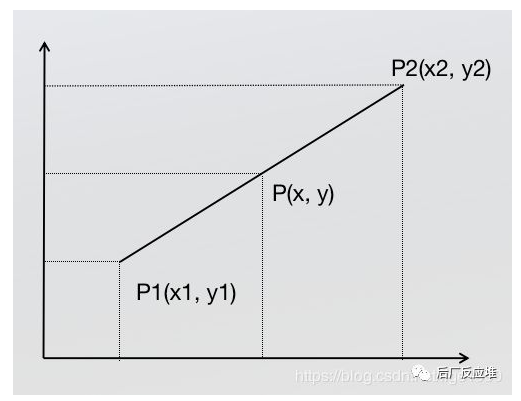
双线性插值(Bilinear):
在图形学中,双线性插值就是求四个点形成的过渡区域中某个点的值(即需要两个方向的过度变化)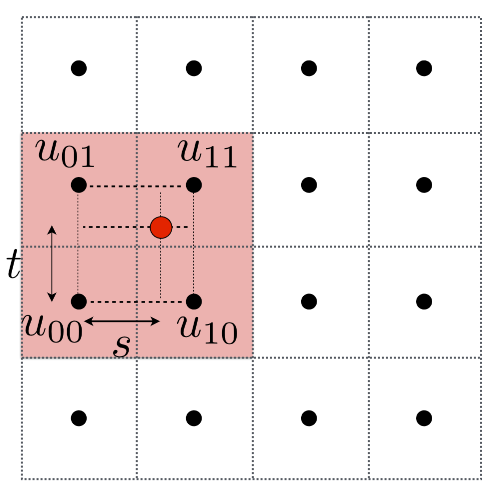
2.重心坐标:
上节课讲到了纹理映射,那么很重要的问题就是三角形内部的点和像素如何进行属性插值,这里的方法:重心坐标 barycentric coordinate
三角形插值:
在重心坐标坐标之前,首先要对三角形进行插值。
为什么需要插值
- 我们的属性值是指定在三角形的顶点上(即线性插值区域的起始和结束),需要知道其内部点和像素的属性值
- 并且需要三角形内部区域平滑过渡的值
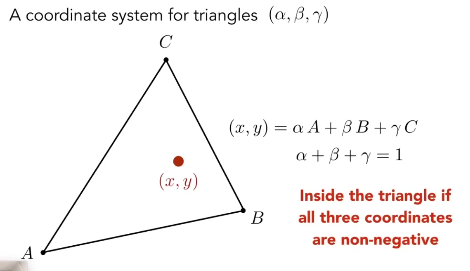
什么是重心坐标(此处只考虑三角形)?
重心坐标是由三角形顶点定义的坐标。
- 三角形上的任一顶点p(x,y)都可以用三个顶点的线性组合表示:p=w1a+w2b+w3*c
- 且系数之和为1:w1+w2+w3=1 (只有系数之和为1,p点才在这个三角形所在的平面上)
- 当满足三个系数都为非负数时,该点在三角形内部
- 可以看出,重心坐标是齐次坐标的一种
这三个系数所表示的坐标(w1,w2,w3),就是该三角形上p点的(归一化)重心坐标。
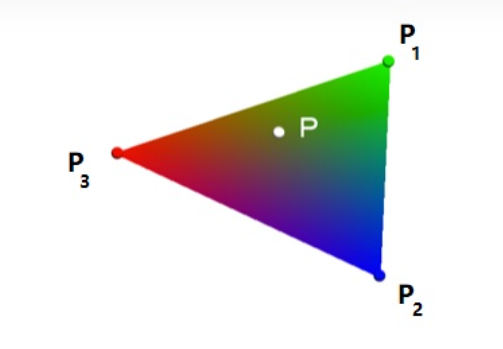
- 插值举例:假设三角形顶点的三个颜色C1,C2,C3,那么p点的颜色就是 Cp=w1C1+w2C2+w3*C3
-
重心坐标定义:
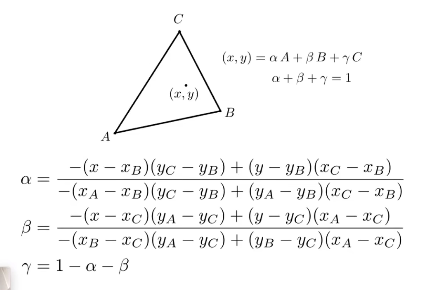
定义一:
三角形中任意一个点的坐标可以用三个顶点的线性组合得到,只需要满足条件 三个系数相加 = 1 ,(因此其实是两个未知数)
- 三个系数都是非负的(如果不限制的话只能说明点在ABC平面内,不一定在三角形内)
把三个系数拿出来作为一个坐标来描述点的位置(与ABC的坐标系无关)
由此,我们知道A的重心坐标为(1,0,0),
定义二: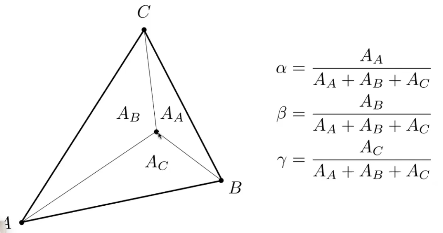
三角形内任意一点,我们可以通过面积比得到重心坐标
所以这为什么叫做重心坐标:重心位置重心坐标就是(1/3,1/3,1/3)
重心坐标与属性插值
上面介绍了重心坐标用来计算任意点的坐标,如果重心坐标应用在属性上,就可以求得任一点的属性。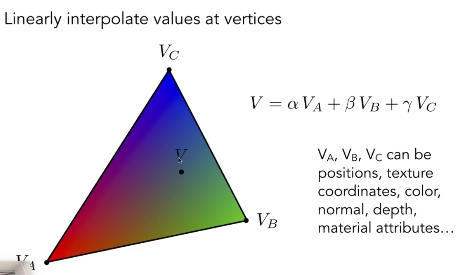
重心坐标在投影的时候,会有问题,应为它不具有投影不变性。
三维空间中V点求得的重心坐标,与把三角形投影后再求的的V点的重心坐标很可能不同。
所以三维中求得的重心坐标只用于三维空间
以深度举例
从三维空间中的物体,投影到屏幕,那么投影了的三角形内部某一点深度值可以是
- A、投影了的三角形的顶点的深度值,进行插值后得到
也可以是
- B、逆变换转换为3D空间中的三角形中的一点,用顶点的深度值进行插值得到
3.纹理贴图走样:
这里定义一个纹理像素的概念,也叫做纹素:texel ,指的是纹理的一个像素的大小。
贴图大小与像素大小不匹配:
当贴图大小密度与像素大小密度不匹配,例如贴图小,而像素密集,那么就会产生锯齿。
为了解决这种走样,目前主要采用这三种方法:
最近邻法(Nearest Interpolation):计算速度最快,但是效果最差。
双线性插值(Bilinear Interpolation):双线性插值是用原图像中4(22)个点计算新图像中1个点,效果略逊于双三次插值,速度比双三次插值快,属于一种平衡美,在很多框架中属于默认算法。
双三次插值(Bicubic interpolation):双三次插值是用原图像中16(44)个点计算新图像中1个点,效果比较好,但是计算代价过大。

远处纹理过于密集:
当在采样过程中,如果远处纹理过于密集,那么会在一个像素上有太多纹理信息,产生摩尔纹。本质上就是一个像素内的纹理太多信号上表示就是高频信息太多,而采样频率不匹配。
解决方法首先就是之前提到的MASS,去除高频信息。但这样的计算消耗会非常大。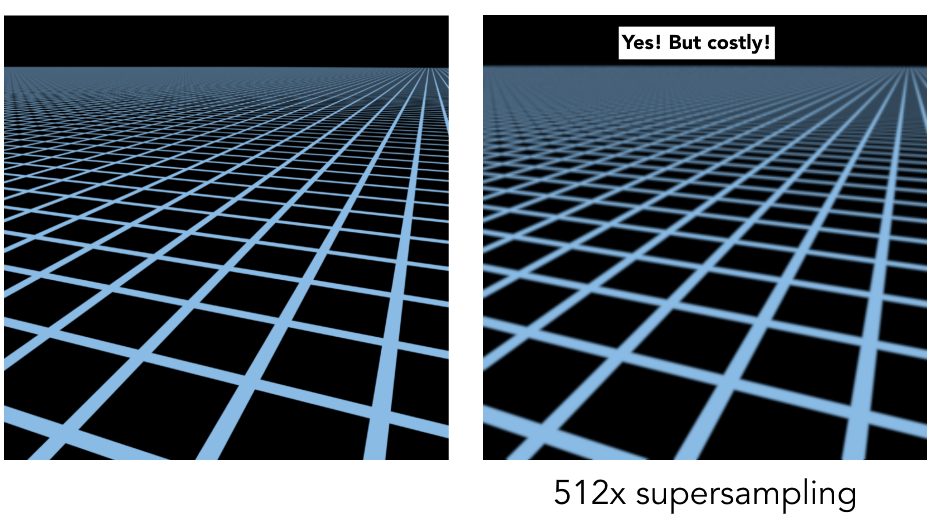
第二种解决方法就是MipMap:
mipmap = image pyramid 图像金字塔
支撑 fast approx square必须是正方形! 范围查询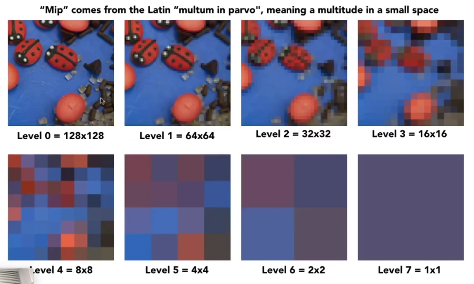
27 = 128
额外引入的存储量是多少?4/3
也就是说,所有新增的mipmap只是增加了原图的1/3(因为MipMap简化了原图的像素信息)
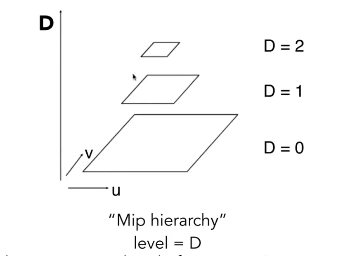
Mipmap实现原理:
首先,要知道 屏幕中的一个像素移动,在对应的UV上有多大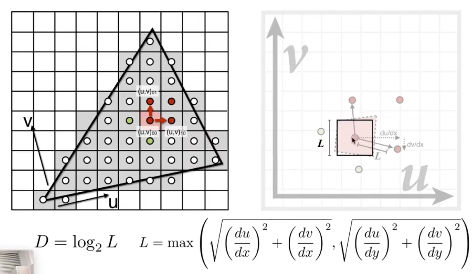
这里取近似,一个最大的正方形边长L,
这便是一个像素 对应的UV上长度,所以,
- D=0,L=1 ;用第0层的mipmap,1个pixel覆盖1个texel。
- D=1,L=2;那么一个pixel覆盖原始2*2 = 4个texel,一个pixel占据4个texel。刚好是第1层mipmap的结果。
- D=2,L=4;那么一个pixel覆盖原始4*4 = 16个texel,一个pixel占据16个texel。刚好是第2层mipmap的结果。
- 。。。
也就是查询在第几层,内部都是1个pixel覆盖1个texel。得到的是平均属性值。最终目的是为了实现像素与纹素的匹配。
可视化的层级查询结果: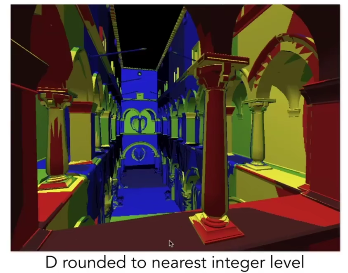
这里有个问题就是不是很连续。容易生成缝隙。
因此,可以进行一个三线性插值。Trilinear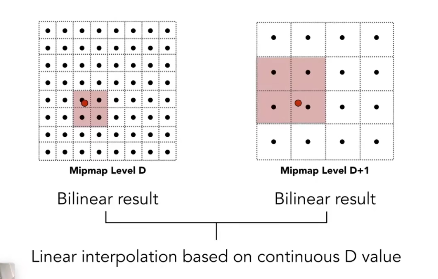
这就是先进行双线性插值(层内平滑),然后把结果再上下插值。(层间平滑)
可视化结果: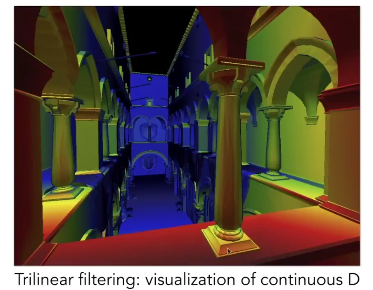
Mipmap的局限性:
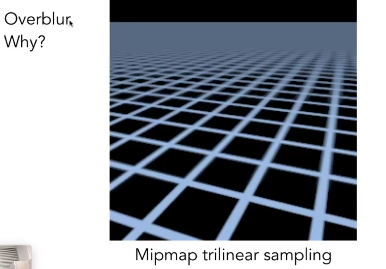
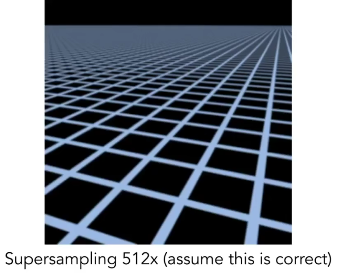
回到一开始的问题,如果512x的超采样时正确的结果,而mipmap却把远处模糊掉了,这是为什么?
可能是三线性插值导致的过度模糊,这个可以用各向异性过滤来解决:Anisotropic Filtering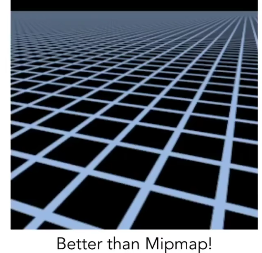
各向异性过滤
那么什么是各向异性过滤呢,其实就是增加了长条形区域的mipmaps。当屏幕像素对应到纹理坐标上时,形状可能是长条形,不再是正方形,例如右上方的长条形。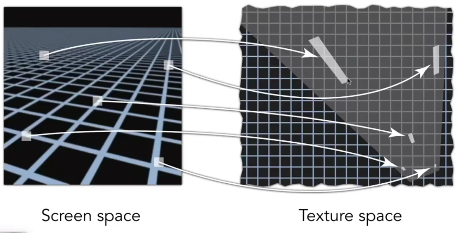 :::info
各向异性,就是在各个方向上表现不同;相对于各项同性。
:::info
各向异性,就是在各个方向上表现不同;相对于各项同性。
它考虑了方向性
:::
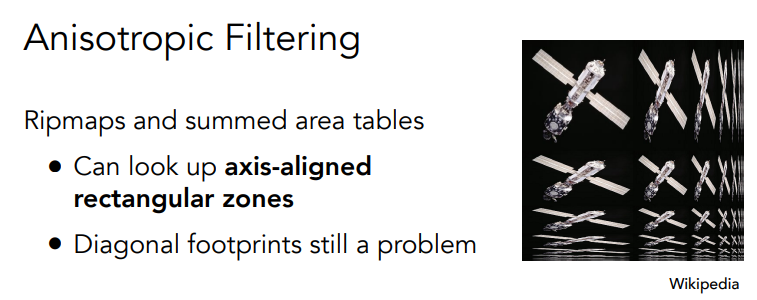
Mipmap在这张Ripmaps上只相当于是对角线范围的数据,
但是,数据量多了3倍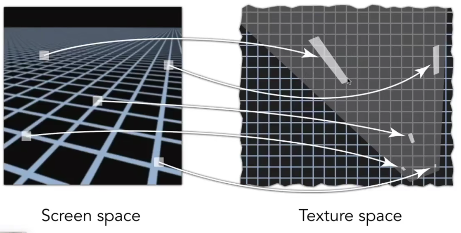
屏幕空间的一个像素,在纹理空间是一个长条形区域,能够快速得到更好的范围查询结果,
mipmap只能支持矩形区域的查询
但是对于左上角这种斜着的长条区域还是不好查询。
还有其他方法,比如说EWA filtering,使用画圆的方式进行多此查询,但这样计算量也会变大。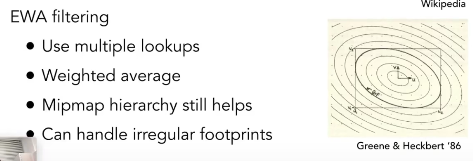

若有收获,就点个赞吧
0 人点赞
