:::info
以下全篇幅以喵比特教育版+Robotbit扩展版为例继续宁案例介绍
:::
数字读
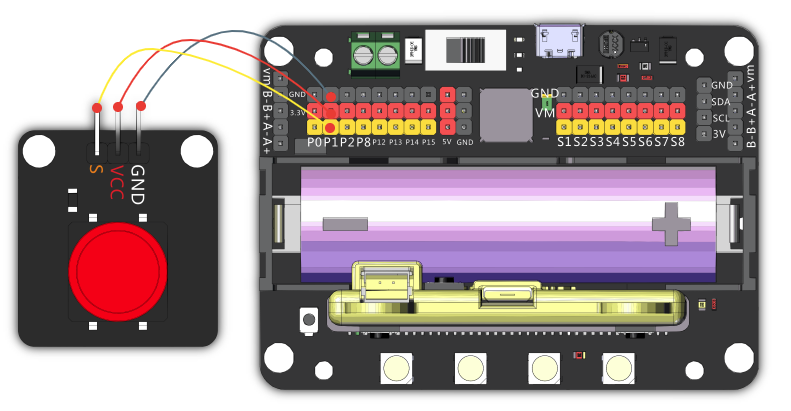
案例 - 辅助计数器(按钮)
简介:统计在指定时间内按下按钮的次数
硬件清单:
- 喵比特*1
- Robotbit拓展板*1
- 按键模块*1
硬件接线
- 示例代码 ```python from meowbit import * from time import sleep
p1 = MeowPin(‘P1’,IN) times = 0 while True: if p1.getDigital() == 0: times = times + 1 screen.clear() screen.text(str(times)) sleep(0.5)
<a name="bJdPg"></a>## 数字写<a name="1CuA9"></a>### 案例 - 小星星(LED灯)- 简介:编程控制led灯亮0.5秒,熄灭0.1秒,循环往复- 硬件清单:- 喵比特*1- Robotbit拓展板*1- 单色LED模块*1- 硬件接线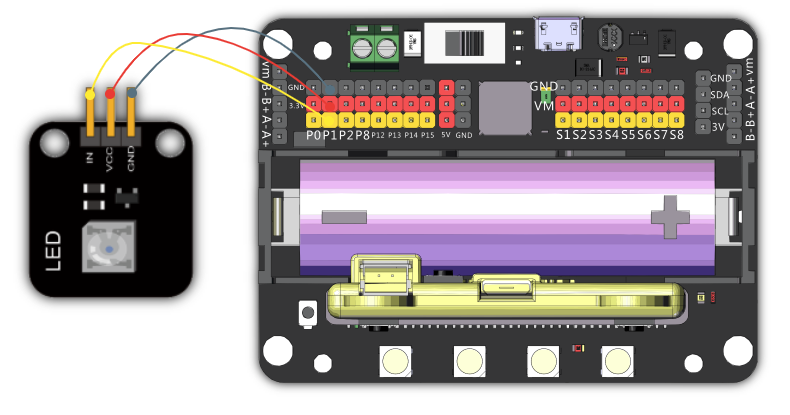- 示例代码```pythonfrom meowbit import *import timep1 = MeowPin('P1',OUT)while True:p1.setDigital(1)time.sleep(0.5)p1.setDigital(0)time.sleep(0.5)
模拟读
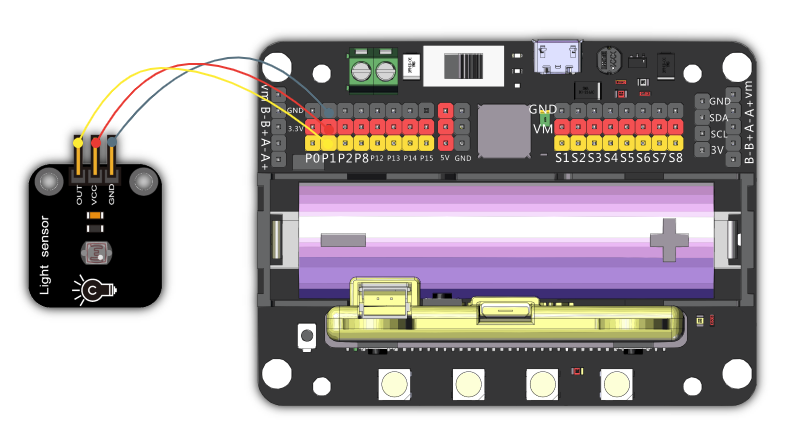
案例 - 光照探测仪(光照强度传感器)
简介:检测光照强度,并通过点阵屏显示当前光照强度值,数值每3秒更新一次
硬件清单:
- 喵比特*1
- Robotbit拓展板*1
- 光照强度传感器*1
硬件接线
- 示例代码 ```python from meowbit import * from time import sleep
screen.sync = 0 p1 = MeowPin(‘P1’,ANALOG) while True: light = p1.getAnalog() screen.clear() screen.text(str(light)) screen.refresh() sleep(3)
<a name="RxFLB"></a>## 模拟写<a name="NF2Ek"></a>### 案例 - 呼吸灯(LED灯)- 简介编程控制led灯缓缓变亮,到达最亮后再缓缓变暗,如此循环往复- 硬件清单:- 喵比特*1- Robotbit拓展板*1- 单色LED模块*1- 硬件连线- 示例代码```pythonfrom meowbit import *from time import sleepp1 = MeowPin('P1',PWM)while True:for i in range(0,200,1):p1.setAnalog(i)sleep_ms(10)for i in range(200,0,-1):p1.setAnalog(i)sleep_ms(10)
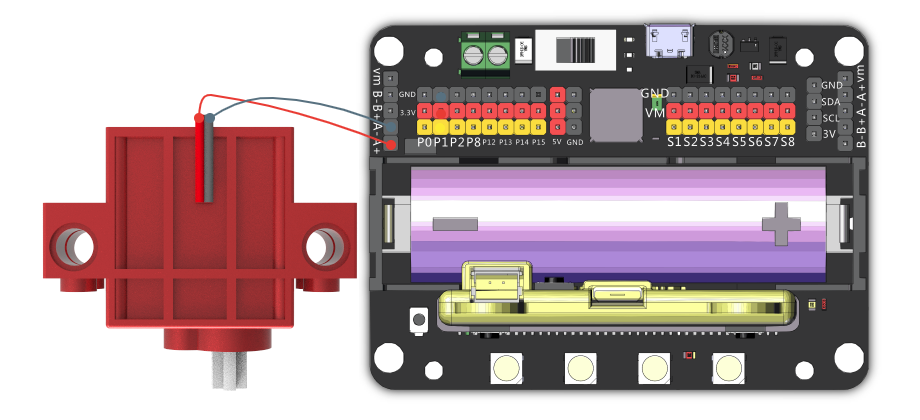
电机
案例 - 大摆锤
简介:编程控制电机先以中等速度工作2秒,停止工作1秒后以最大速度工作5秒,然后以中等速度工作2秒,最后停止
硬件清单
- 喵比特*1
- Robotbit拓展板*1
- 电机模块*1
硬件接线
- 示例代码 ```python from robotbit import RobotBit from time import sleep
robotbit = RobotBit() robotbit.motor(1, 100, 2000) sleep(1) robotbit.motor(1, 255, 5000) robotbit.motor(1, 100, 2000)
<a name="NLp6P"></a>## 舵机<a name="pt6ai"></a>### 案例 - 定点运输- 简介:9g小舵机在A(0°方向)、B(90°方向)、C(180°方向)三个点间往复运动,其中在A点停留5秒,B点停留2秒,C点停留2秒- 硬件清单 :- 喵比特*1- Robotbit拓展板*1- Geekservo 9g舵机*1- 硬件接线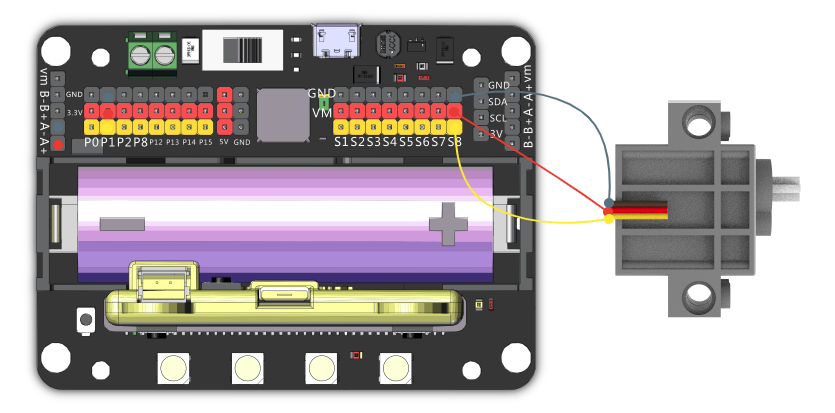- 示例代码```pythonfrom robotbit import RobotBitfrom time import sleeprobotbit = RobotBit()while True:robotbit.geekServo9g(8, int(0))sleep(5)robotbit.geekServo9g(8, int(90))sleep(2)robotbit.geekServo9g(8, int(180))sleep(2)
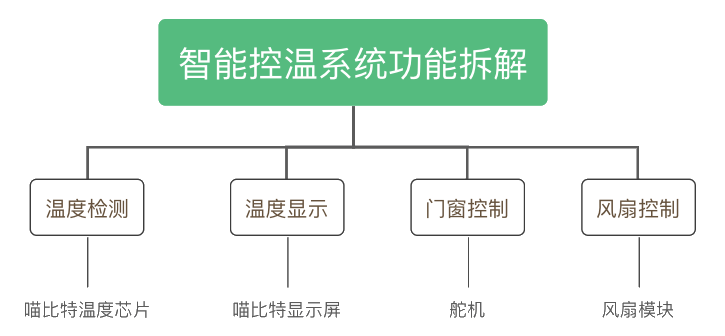
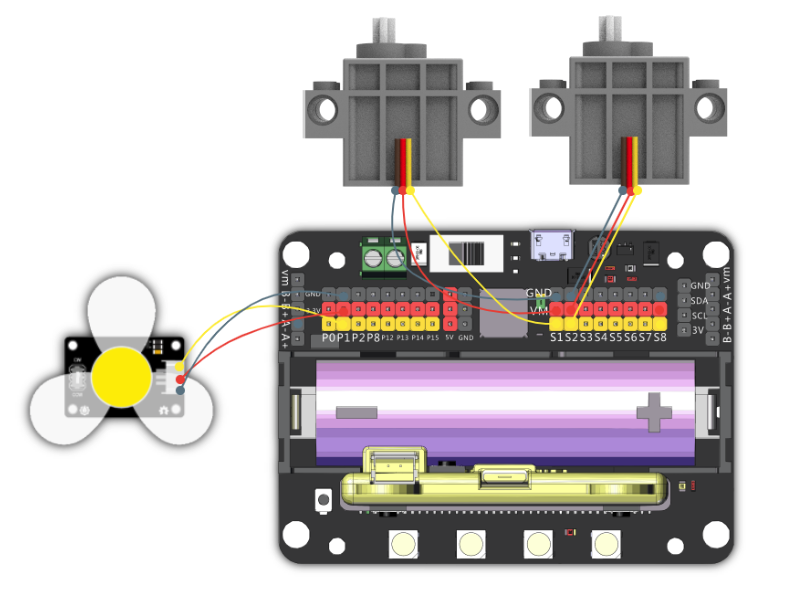
综合案例 - 教室智能控温系统
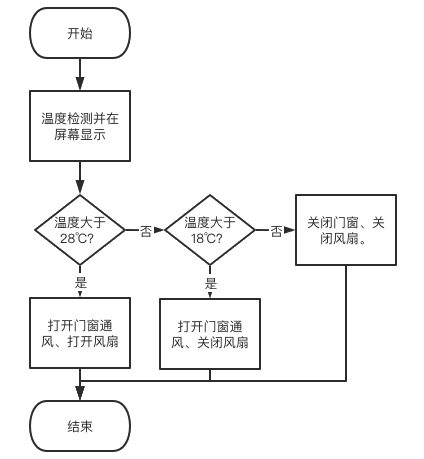
简介:通过喵比特自带温度检测模块检测室内温度,并实时显示在屏幕上。当温度过高时(大于28℃)自动打开门窗,并打开风扇;当温度适宜时(18℃-28℃),关闭风扇,只打开门窗;当温度较低时(小于18℃)自动关闭门窗
方案设计:
- 控制流程梳理
硬件清单:
- 喵比特*1
- Geekservo 9g小舵机*2
- 风扇*1
- Robotbit拓展板*1
硬件接线
- 示例代码 ```python from meowbit import * from robotbit import RobotBit from time import sleep
robotbit = RobotBit() p1 = MeowPin(“P1”,OUT) p1.setDigital(0)
while True: tempetature = sensor.getTemp() screen.clear() screen.text(str(tempetature)) if tempetature > 28: p1.setDigital(1)
#S1端口舵机控制门,0度为关门,90度为开门robotbit.geekServo9g(1, 90)sleep(1)#S2端口舵机控制窗户,0度为关窗,90度为开窗robotbit.geekServo9g(2, 90)sleep(1)elif tempetature >18:p1.setDigital(0)robotbit.geekServo9g(1, 90)sleep(1)robotbit.geekServo9g(2, 90)sleep(1)else:p1.setDigital(0)robotbit.geekServo9g(1, 0)sleep(1)robotbit.geekServo9g(2, 0)sleep(1)sleep(3)
```

若有收获,就点个赞吧
0 人点赞
