简介:
Robotbit扩展板,将喵比特主板的引脚进行引出,如图所示。
扩展板引出了P0、P1、P2、P8、P12、P13、P14、P15,一共8个引脚(其中如果需要使用P0引脚,需要把跳线帽拔掉)
黄色那排是信号脚,对应以上的引脚
红色那排是3.3V电源
黑色那排是GND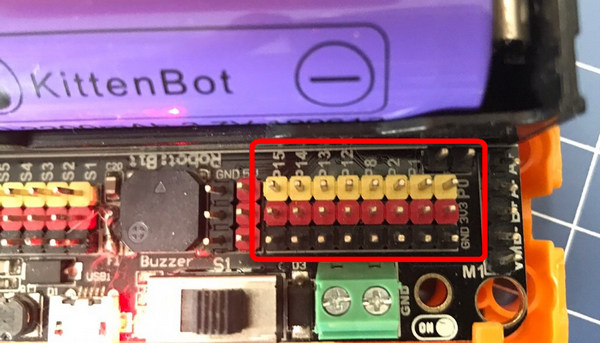
通过这些3PIN引脚可以接外部的3PIN传感器和模块。
外部3PIN模块一般引脚可以分为OUT、VCC与GND,对应分别接扩展板的黄色(数据脚)、红色(电源正)、黑色(电源负)引脚。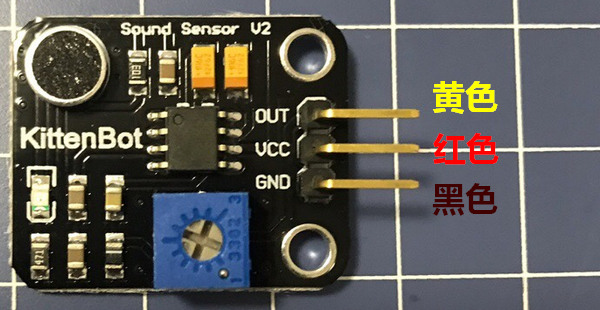
P0引脚注意
Robotbit扩展板上的P0引脚默认与扩展板的蜂鸣器相连,因为喵比特主控板上已经集合了蜂鸣器,因此可以把Robotbit扩展板的跳线帽取下来,这样我们就可以释放P0引脚,P0引脚可接其他传感器。
此为跳线帽: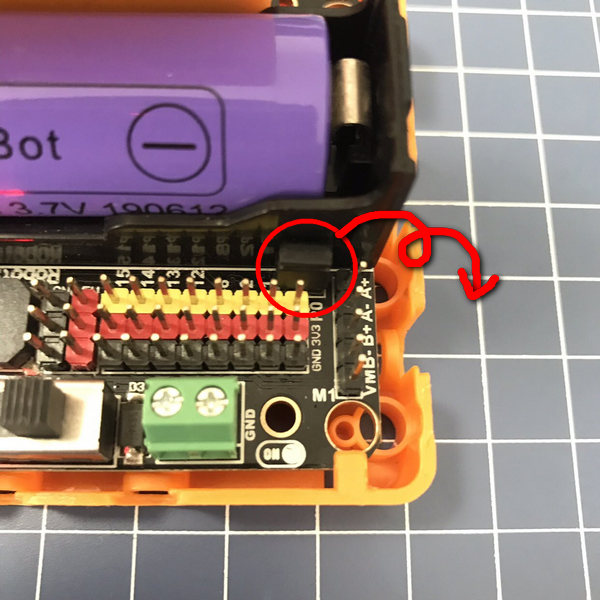
把跳线帽拔下来: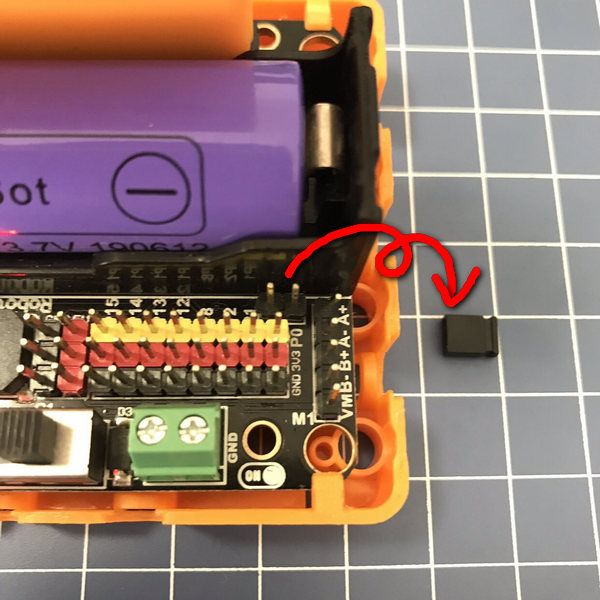
引脚积木块:
喵家编程插件这部分用于控制对应的引脚
引脚控制一般分为4种类型,如图所示
数字输入(IN)
数字输出(OUT)
模拟输入(ANALOG)
模拟输出(PWM)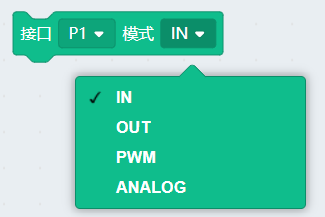
引脚控制的选择是根据所接传感器的类型所决定的。
数字输入
常见的数字输入模块有:按键模块、干簧管磁性模块、振动模块等等。
数字输入指:外部物理量或者一些动作触发,模块给主控板(喵比特)反馈高低电平,即返回1或者0
示例——红外避障传感器
接线如图所示: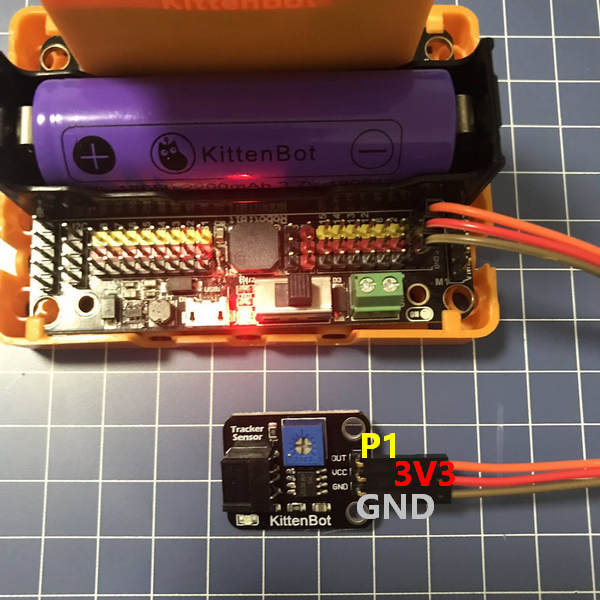
程序:
靠近红外避障传感器为0(False),远离为1(True)
因此当远离时,喵比特屏幕显示为笑脸。靠近时,喵比特屏幕显示为哭脸。
数字输出
常见的数字输入模块有:LED模块、有源蜂鸣器模块等等。
数字输出指:主控板(喵比特)给模块输出高低电平,即输出1或者0,让模块进行亮灭(LED模块),改变其状态。
示例——LED模块
程序:
将P1引脚设为数字输出
循环执行让P1输出高低电平,即可控制LED模块亮灭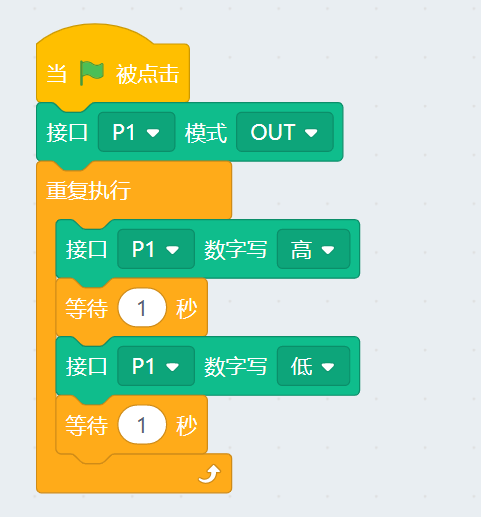
模拟输入
常见的数字输入模块有:旋转电位器、滑动电位器模块等等。
模拟输入指:外部物理量或者一些动作触发,模块给主控板(喵比特)反馈一个电压值,一般数值为0~4096
示例——滑动电位器
接线如图所示: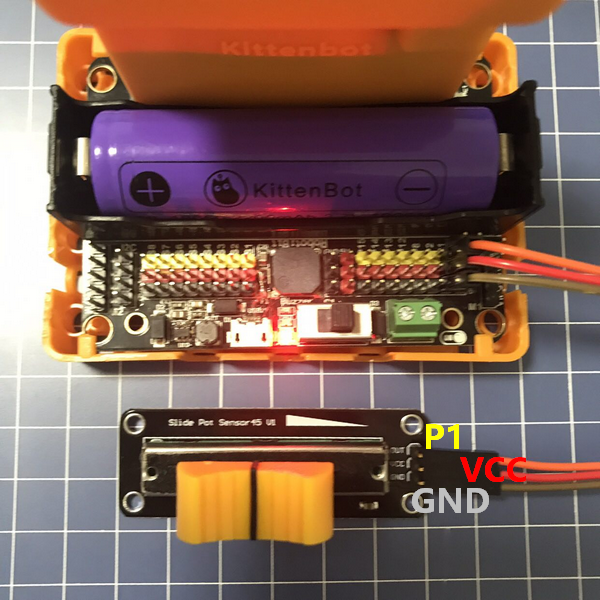
程序:
将P1引脚设为模拟输入
屏幕显示P1引脚的模拟输入值
循环重复检测与清屏刷新
模拟输出
常见的数字输入模块有:LED模块模块、有源蜂鸣器模块等等。
模拟输出指:主控板(喵比特)给模块输出脉冲信号,数值一般为0~1023
示例——LED模块渐亮程序
程序:
将P2引脚设为模拟输出
让P2的模拟输出值不断增大,直至到1024再设为0
通过这个程序LED模块现象循环逐渐变亮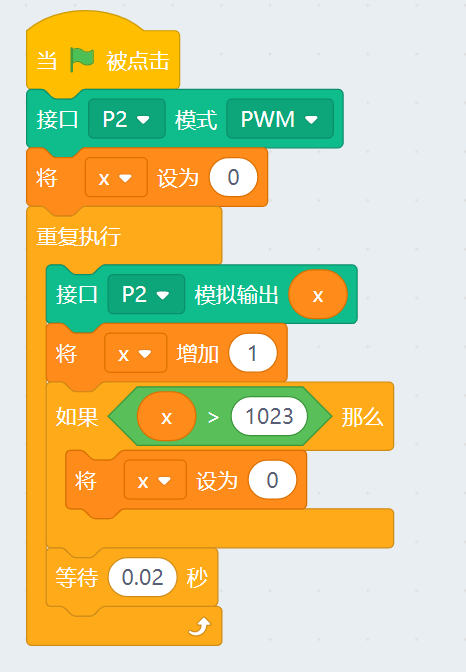

若有收获,就点个赞吧
0 人点赞
