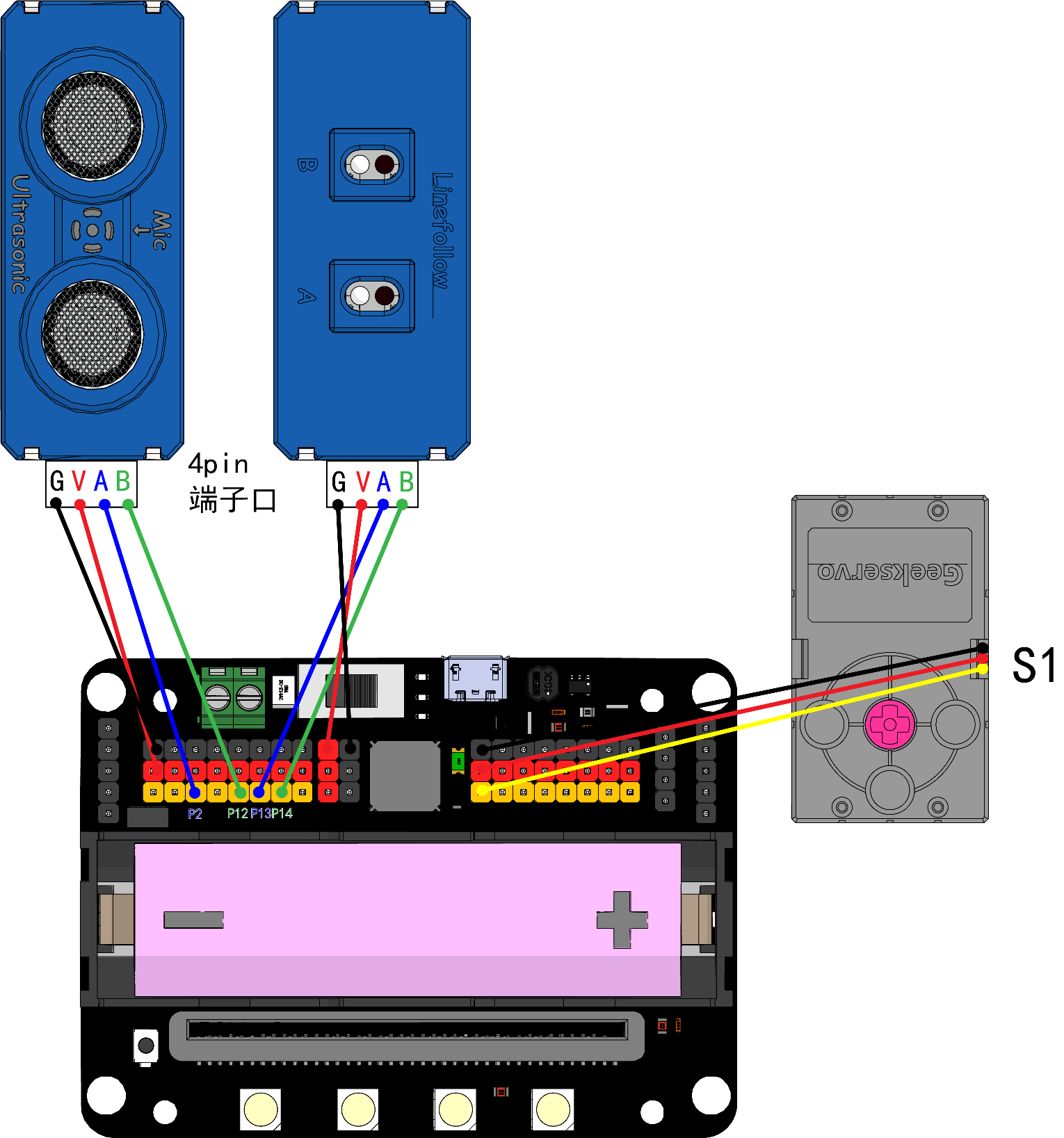
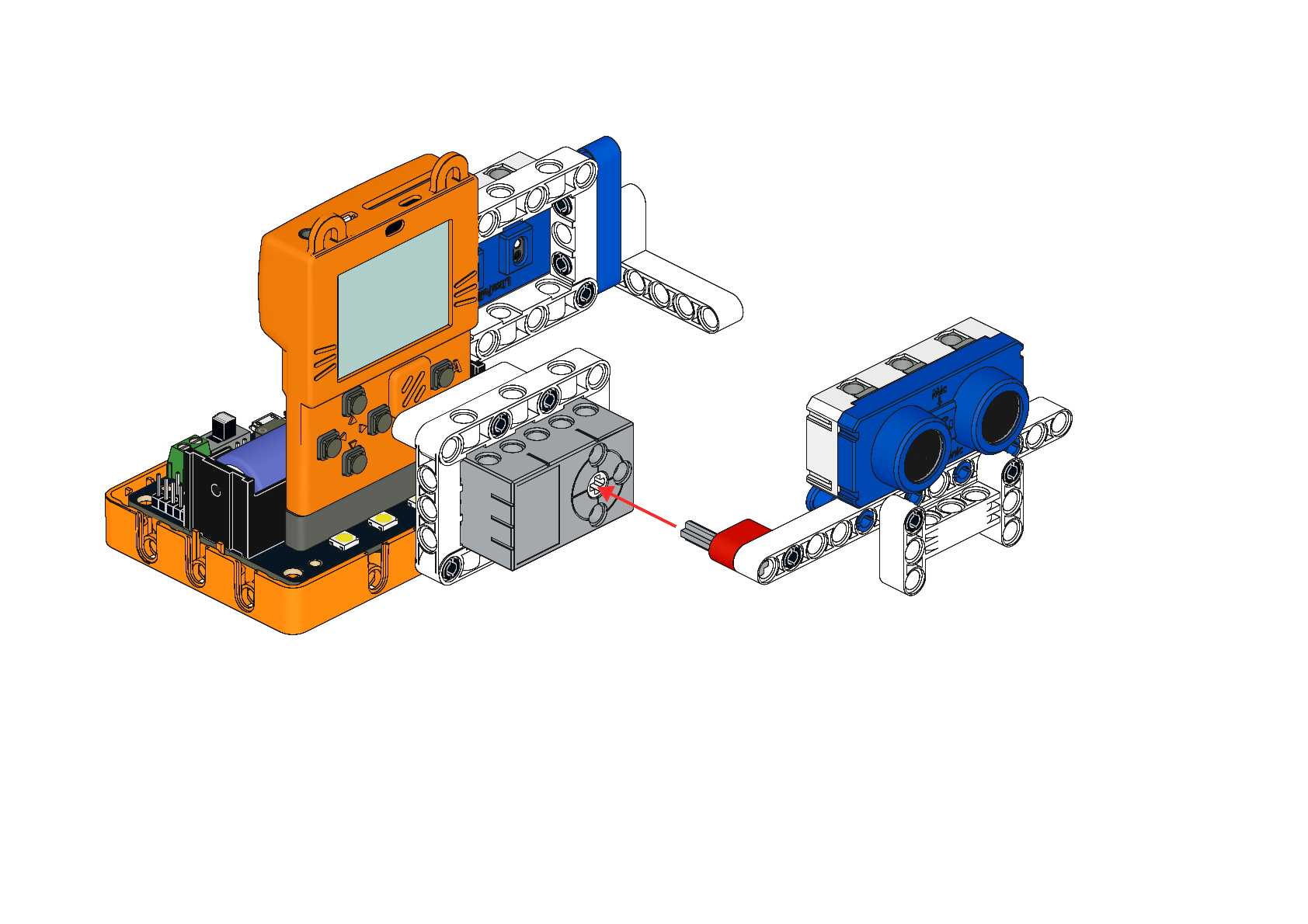
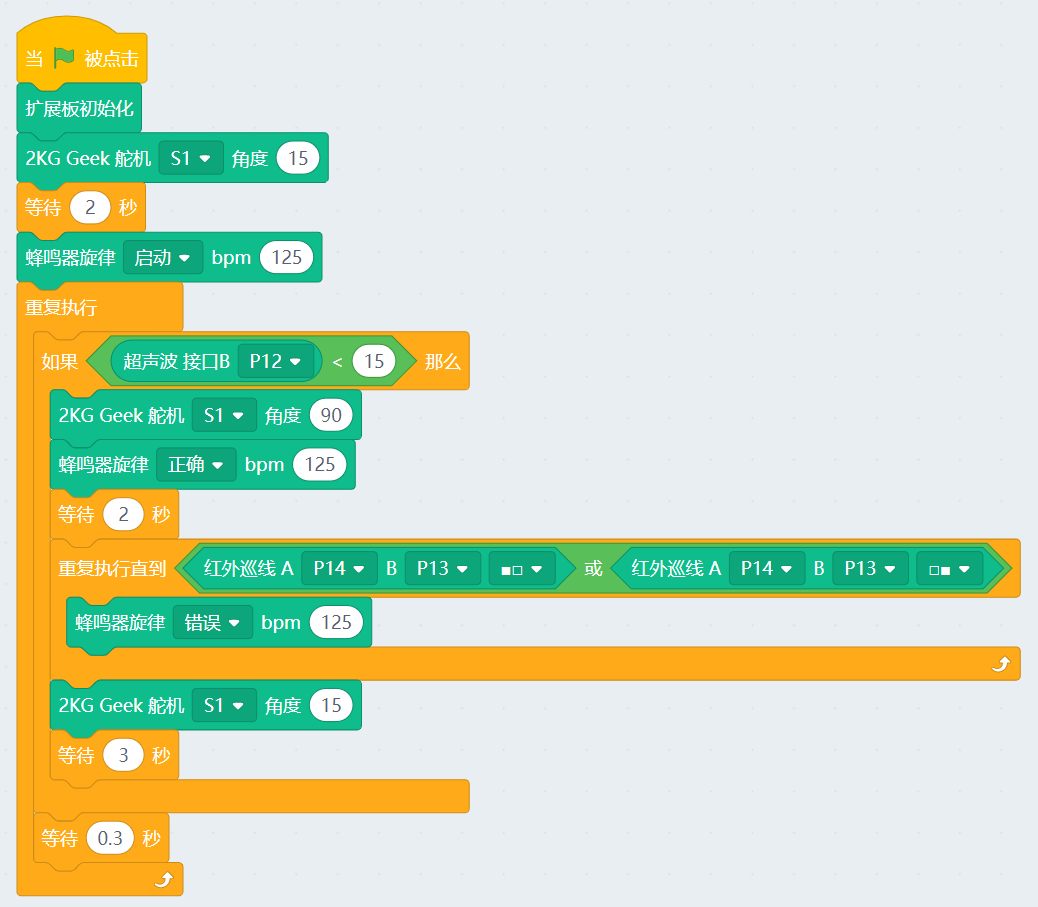
简介接线图程序 简介这里模拟一个真实的停车场景,我们使用舵机控制门闸的开关,超声波检测到有物体靠近,使用巡线传感器作为感应是否完全进入区域,然后关闭门闸 接线图安装说明:在舵机上的结构,提前控制舵机角度为15度,然后安装。这个为初始化的状态 程序 当超声波检测距离小于15之后,打开门闸,当巡线传感器检测到有物体在面前,就关闭门闸