1. 概述
直接通过加速度判断喵比特姿态比较麻烦,所以我们将其进行封装为几个姿态检测指令,可以通过指令轻松知道喵比特当前的姿态。
2. 指令解析表
| 指令 | 解析 |
|---|---|
 |
判断当前主板是否处于某种姿态,如果是则返回True,否则返回False;单击指令方块中的【▽】可以选择要检查的姿态。 |
 |
姿态检测事件,在任何情况下,按下姿态满足要求可运行一次;单击指令方块中的【▽】会出现姿态选择列表,选择要检测的姿态。 |
 |
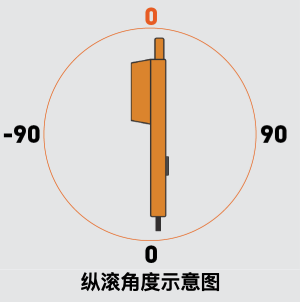
检测喵比特当前横向/纵向的滚回角度,单击指令方块中的【▽】可以切换检测其他方向的滚动角度。 |
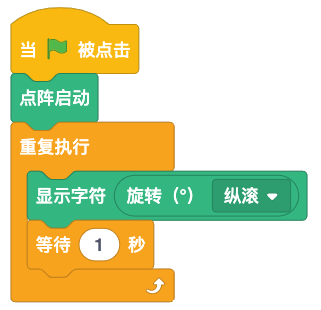
3. 示例
4. 注意事项
1)横滚和纵滚数值值范围不同,在使用时,建议根据实际使用需要设置其角度,测试阈值。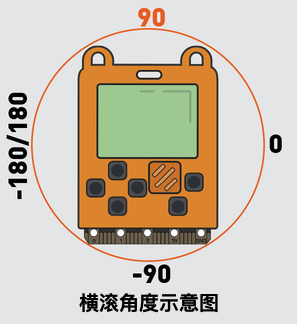
2)使用在线控制时因为数据传输量大,所以反馈可能不及时,建议使用姿态检测时,将程序下载到喵比特,离线运行。

若有收获,就点个赞吧
0 人点赞
