神经元模型
MP神经元,多个加权后减去阈值,最后通过激活函数
激活函数最好的就是阶跃函数,但是不连续不可导
可以用Sigmoid代替
感知机和多层网络
感知机由两层神经元组成,输入层接受外界输入信号传递给输出层,输出层是MP
神经元(阈值逻辑单元)感知机能够容易地实现逻辑与、或、非运算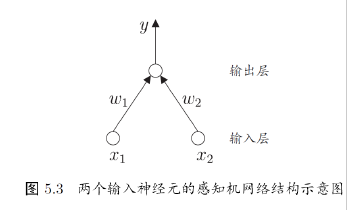
若两类模式线性可分, 则感知机的学习过程一定会收敛;否则感知机的学习过程将会发生震荡
单层感知机的学习能力非常有限, 只能解决线性可分问题。事实上, 与、或、非问题是线性可分的, 因此感知机学习过程能够求得适当的权值向量,而异或问题不是线性可分的, 感知机学习不能求得合适解。可以用多层感知机
输出层与输入层之间的一层神经元, 被称之为隐层或隐含层, 隐含层和输出层神经元都是具有激活函数的功能神经元
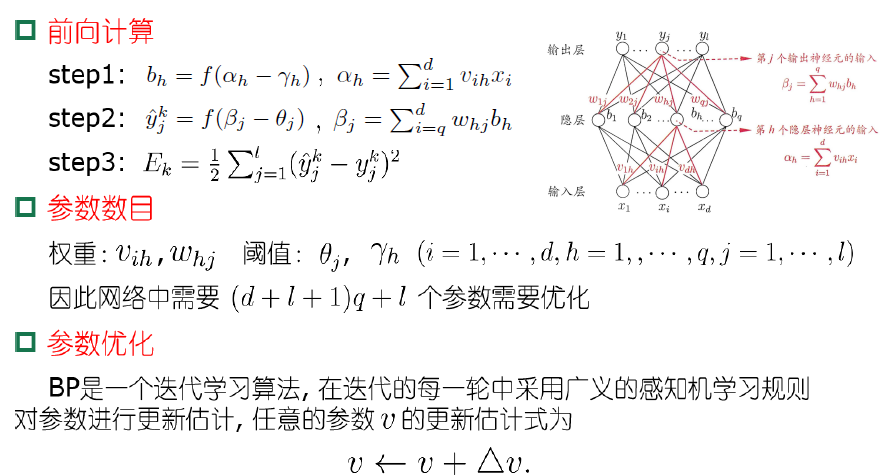
多层前馈神经网络
每层神经元与下一层神经元全互联, 神经元之间不存在同层连接也不存在跨层连接
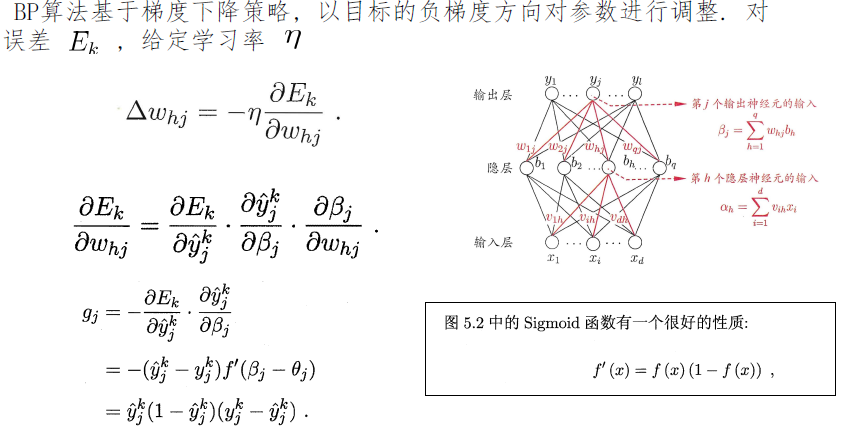
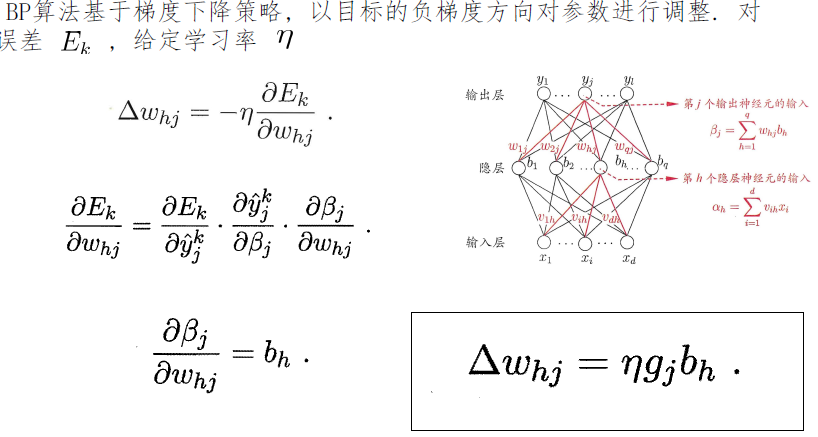
误差逆传播算法
- 标准 BP 算法
- 每次针对单个训练样例更新权值与阈值.
- 参数更新频繁, 不同样例可能抵消, 需要多次迭代.
- 累计 BP 算法
- 其优化的目标是最小化整个训练集上的累计误差
- 读取整个训练集一遍才对参数进行更新, 参数更新频率较低.
但在很多任务中, 累计误差下降到一定程度后, 进一步下降会非常缓慢,这时标准BP算法往往会获得较好的解, 尤其当训练集非常大时效果更明显.
多层前馈网络表示能力
只需要一个包含足够多神经元的隐层, 多层前馈神经网络就能以任意精度逼近任意复杂度的连续函数
多层前馈网络局限
- 神经网络由于强大的表示能力, 经常遭遇过拟合。表现为:训练误差持续降低, 但测试误差却可能上升
- 如何设置隐层神经元的个数仍然是个未决问题. 实际应用中通常使用“试错法”调整
缓解过拟合的策略
- 早停:在训练过程中, 若训练误差降低, 但验证误差升高, 则停止训练
- 正则化:在误差目标函数中增加一项描述网络复杂程度的部分, 例如连接权值与阈值的平方和
全局最小与局部极小
梯度为零,且误差函数小于周边即局部最小
可能有多个局部最小,但是只有一个全局最小
- 模拟退火技术 [Aarts and Korst, 1989]. 每一步都以一定的概率接受比当前解更差的结果, 从而有助于跳出局部极小.
- 随机梯度下降. 与标准梯度下降法精确计算梯度不同, 随机梯度下降法在计算梯度时加入了随机因素.
- 遗传算法 [Goldberg, 1989]. 遗传算法也常用来训练神经网络以更好地逼近全局极小.
其他常见神经网络
RBF神经网络
ART网络
SOM网络
级联相关网络
Elman网络
Boltzmann 机
深度学习
- 增加隐层神经元的数目 (模型宽度)
- 加隐层数目(模型深度)
- 从增加模型复杂度的角度看, 增加隐层的数目比增加隐层神经元的数目更有效. 这是因为增加隐层数不仅增加额拥有激活函数的神经元数目,还增加了激活函数嵌套的层数
- 多隐层网络难以直接用经典算法(例如标准BP算法)进行训练, 因为误差在多隐层内逆传播时, 往往会”发散”而不能收敛到稳定状态.
复杂模型训练方法
预训练+微调的方法
- 预训练就是逐层进行训练
- 微调就是预训练结束之后,在整个网络进行微调
权共享
一组神经元使用相同的连接权值.
权共享策略在卷积神经网络(CNN)[LeCun and Bengio, 1995; LeCun et al. , 1998]中发挥了重要作用.
卷积神经网络
- 卷积层
- 池化层
- 连接层
一般用max(0,x)替换Sigmoid

若有收获,就点个赞吧
0 人点赞
