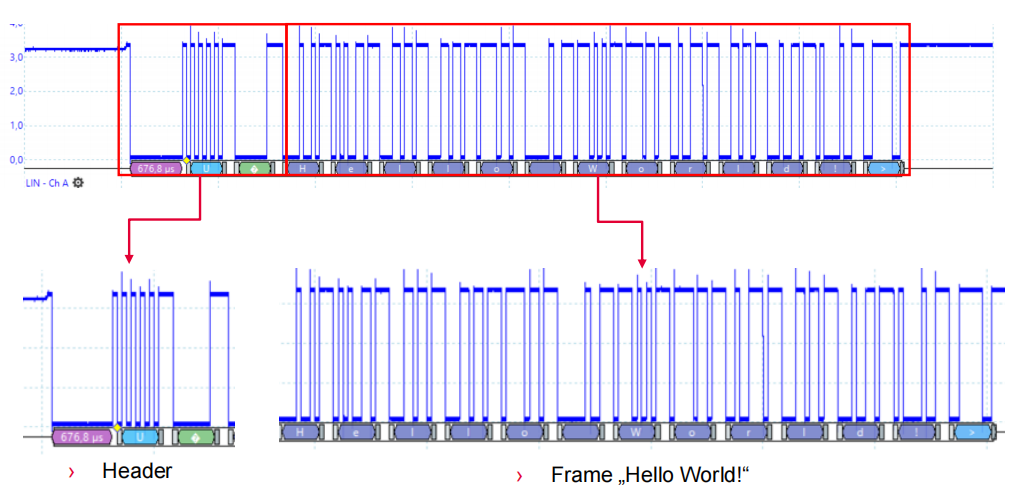
实验现象

代码
ASCLIN_LIN_Master.c

/*********************************************************************************************************************//*-----------------------------------------------------Includes------------------------------------------------------*//*********************************************************************************************************************/#include "IfxAsclin.h"#include "IfxAsclin_Lin.h"#include "ASCLIN_LIN_Master.h"/*********************************************************************************************************************//*------------------------------------------------------Macros-------------------------------------------------------*//*********************************************************************************************************************/#define SERIAL_BAUDRATE 19200 /* Set the baud rate */#define SIZE 12 /* Size of the message */#define ID_BYTE 0x80 /* Set the LIN ID byte to a random number */#define RX_PIN IfxAsclin1_RXB_P15_5_IN /* Set RX port pin */#define TX_PIN IfxAsclin1_TX_P15_5_OUT /* Set TX port pin *//*********************************************************************************************************************//*-------------------------------------------------Global variables--------------------------------------------------*//*********************************************************************************************************************/static IfxAsclin_Lin g_linMaster;/*********************************************************************************************************************//*----------------------------------------------Function Implementations---------------------------------------------*//*********************************************************************************************************************//* This function initializes the ASCLIN LIN module in master mode */void init_ASCLIN_LIN_master(void){/* Initialize one instance of IfxAsclin_Lin_Config with default values */IfxAsclin_Lin_Config linMasterConfig;IfxAsclin_Lin_initModuleConfig(&linMasterConfig, &MODULE_ASCLIN1);linMasterConfig.linMode = IfxAsclin_LinMode_master; /* Set the LIN mode of operation */linMasterConfig.brg.baudrate = SERIAL_BAUDRATE; /* Set the desired baud rate */const IfxAsclin_Lin_Pins pins ={&RX_PIN, IfxPort_InputMode_pullUp, /* RX port pin */&TX_PIN, IfxPort_OutputMode_pushPull, /* TX port pin */IfxPort_PadDriver_cmosAutomotiveSpeed1};linMasterConfig.pins = &pins; /* Port pins configuration *//* Initialize module */IfxAsclin_Lin_initModule(&g_linMaster, &linMasterConfig);}/* This function sends the string "Hello World!" */void send_ASCLIN_LIN_message(void){uint8 txId = ID_BYTE; /* ID which gets transmitted within the header */uint8 txData[SIZE] = {"Hello World!"}; /* Frame to send *//* After the transmission of the LIN header by the master, the master itself starts the transmission* of the message.*/IfxAsclin_Lin_sendHeader(&g_linMaster, &txId); /* Send LIN header */if(g_linMaster.acknowledgmentFlags.txHeaderEnd == 1) /* If the LIN header has been transmitted */{IfxAsclin_Lin_sendResponse(&g_linMaster, txData, SIZE); /* Send message */}}

若有收获,就点个赞吧
0 人点赞
