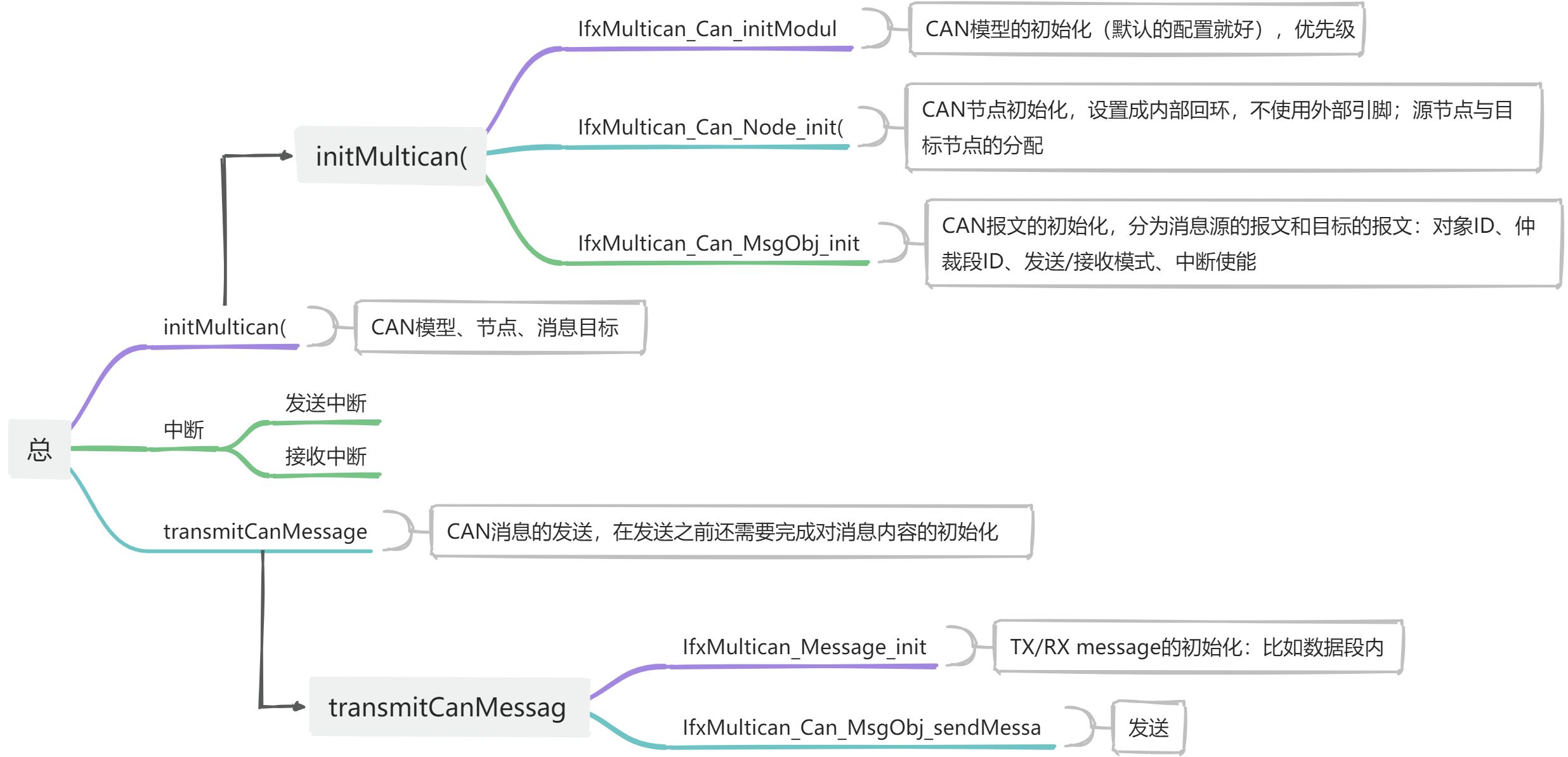
/*********************************************************************************************************************//*-----------------------------------------------------Includes------------------------------------------------------*//*********************************************************************************************************************/#include "MULTICAN.h"/*********************************************************************************************************************//*-------------------------------------------------Global variables--------------------------------------------------*//*********************************************************************************************************************/AppMulticanType g_multican; /* Global MULTICAN configuration and control structure */AppLedType g_led; /* Global LED configuration and control structure *//*********************************************************************************************************************//*---------------------------------------------Function Implementations----------------------------------------------*//*********************************************************************************************************************//* Macro to define Interrupt Service Routine.* This macro:* - defines linker section as .intvec_tc<vector number>_<interrupt priority>.* - defines compiler specific attribute for the interrupt functions.* - defines the Interrupt service routine as ISR function.** IFX_INTERRUPT(isr, vectabNum, priority)* - isr: Name of the ISR function.* - vectabNum: Vector table number.* - priority: Interrupt priority. Refer Usage of Interrupt Macro for more details.*/IFX_INTERRUPT(canIsrTxHandler, 0, ISR_PRIORITY_CAN_TX);IFX_INTERRUPT(canIsrRxHandler, 0, ISR_PRIORITY_CAN_RX);/* Interrupt Service Routine (ISR) called once the TX interrupt has been generated.* Turns on the LED1 to indicate successful CAN message transmission.*/void canIsrTxHandler(void){/* Just to indicate that the CAN message has been transmitted by turning on LED1 */IfxPort_setPinLow(g_led.led1.port, g_led.led1.pinIndex);}/* Interrupt Service Routine (ISR) called once the RX interrupt has been generated.* Compares the content of the received CAN message with the content of the transmitted CAN message* and in case of success, turns on the LED2 to indicate successful CAN message reception.*/void canIsrRxHandler(void){IfxMultican_Status readStatus;/* Read the received CAN message and store the status of the operation */readStatus = IfxMultican_Can_MsgObj_readMessage(&g_multican.canDstMsgObj, &g_multican.rxMsg);/* If no new data has been received, report an error */if( !( readStatus & IfxMultican_Status_newData ) ){while(1){}}/* If new data has been received but with one message lost, report an error */if( readStatus == IfxMultican_Status_newDataButOneLost ){while(1){}}/* Finally, check if the received data matches with the transmitted one */if( ( g_multican.rxMsg.data[0] == g_multican.txMsg.data[0] ) &&( g_multican.rxMsg.data[1] == g_multican.txMsg.data[1] ) &&( g_multican.rxMsg.id == g_multican.txMsg.id ) ){/* Turn on the LED2 to indicate correctness of the received message */IfxPort_setPinLow(g_led.led2.port, g_led.led2.pinIndex);}}/* Function to initialize MULTICAN module, nodes and message objects related for this application use case */void initMultican(void){/* ==========================================================================================* CAN module configuration and initialization:* ==========================================================================================* - load default CAN module configuration into configuration structure** - define the interrupt priority for both interrupt node pointers used in the example** - initialize CAN module with the modified configuration* ==========================================================================================*/IfxMultican_Can_initModuleConfig(&g_multican.canConfig, &MODULE_CAN);g_multican.canConfig.nodePointer[TX_INTERRUPT_SRC_ID].priority = ISR_PRIORITY_CAN_TX;g_multican.canConfig.nodePointer[RX_INTERRUPT_SRC_ID].priority = ISR_PRIORITY_CAN_RX;IfxMultican_Can_initModule(&g_multican.can, &g_multican.canConfig);/* ==========================================================================================* Source CAN node configuration and initialization:源CAN节点配置和初始化:* ==========================================================================================* - load default CAN node configuration into configuration structure** - set source CAN node in the "Loop-Back" mode (no external pins will be used)* - assign source CAN node to CAN node 0** - initialize the source CAN node with the modified configuration* ==========================================================================================*/IfxMultican_Can_Node_initConfig(&g_multican.canNodeConfig, &g_multican.can);g_multican.canNodeConfig.loopBackMode = TRUE;//将源CAN节点设置为“环回”模式(不使用外部引脚)g_multican.canNodeConfig.nodeId = IfxMultican_NodeId_0;//将源CAN节点分配给CAN节点0IfxMultican_Can_Node_init(&g_multican.canSrcNode, &g_multican.canNodeConfig);/* ==========================================================================================* Destination CAN node configuration and initialization:* ==========================================================================================* - load default CAN node configuration into configuration structure** - set destination CAN node in the "Loop-Back" mode (no external pins will be used)* - assign destination CAN node to CAN node 1** - initialize the destination CAN node with the modified configuration* ==========================================================================================*/IfxMultican_Can_Node_initConfig(&g_multican.canNodeConfig, &g_multican.can);g_multican.canNodeConfig.loopBackMode = TRUE;g_multican.canNodeConfig.nodeId = IfxMultican_NodeId_1;IfxMultican_Can_Node_init(&g_multican.canDstNode, &g_multican.canNodeConfig);/* ==========================================================================================* Source message object configuration and initialization:源消息对象配置和初始化* ==========================================================================================* - load default CAN message object configuration into configuration structure* 将默认CAN消息对象配置加载到配置结构中* - define the message object ID* - define the CAN message ID used during arbitration phase* - define the message object as a transmit message object* - enable interrupt generation in case of CAN message transmission* - define interrupt node pointer to be used** - initialize the source CAN message object with the modified configuration* ==========================================================================================*/IfxMultican_Can_MsgObj_initConfig(&g_multican.canMsgObjConfig, &g_multican.canSrcNode);g_multican.canMsgObjConfig.msgObjId = SRC_MESSAGE_OBJECT_ID;//源消息的对象IDg_multican.canMsgObjConfig.messageId = CAN_MESSAGE_ID;//仲裁段ID,它决定着数据帧发送的优先级,也决定着其它节点是否会接收这个数据帧g_multican.canMsgObjConfig.frame = IfxMultican_Frame_transmit;//发送模式g_multican.canMsgObjConfig.txInterrupt.enabled = TRUE;//发送中断使能g_multican.canMsgObjConfig.txInterrupt.srcId = TX_INTERRUPT_SRC_ID;//发送中断的服务请求ID,定义要使用的中断节点指针IfxMultican_Can_MsgObj_init(&g_multican.canSrcMsgObj, &g_multican.canMsgObjConfig);/* ==========================================================================================* Destination message object configuration and initialization:* ==========================================================================================* - load default CAN message object configuration into configuration structure** - define the message object ID (different than the ID used for source MO)* - define the CAN message ID used during arbitration phase (same as ID used for source MO)* - define the message object as a receive message object* - enable interrupt generation in case of CAN message transmission* - define interrupt node pointer to be used (different than the one used for source MO)** - initialize the destination CAN message object with the modified configuration* ==========================================================================================*/IfxMultican_Can_MsgObj_initConfig(&g_multican.canMsgObjConfig, &g_multican.canDstNode);g_multican.canMsgObjConfig.msgObjId = DST_MESSAGE_OBJECT_ID;//消息对象IDg_multican.canMsgObjConfig.messageId = CAN_MESSAGE_ID;//仲裁段ID,它决定着数据帧发送的优先级,也决定着其它节点是否会接收这个数据帧g_multican.canMsgObjConfig.frame = IfxMultican_Frame_receive;//接收模式g_multican.canMsgObjConfig.rxInterrupt.enabled = TRUE;g_multican.canMsgObjConfig.rxInterrupt.srcId = RX_INTERRUPT_SRC_ID;//定义要使用的中断节点指针(不同于用于源MO的指针)IfxMultican_Can_MsgObj_init(&g_multican.canDstMsgObj, &g_multican.canMsgObjConfig);}/* Function to initialize both TX and RX messages with the default data values.* After initialization of the messages, the TX message will be transmitted.*/void transmitCanMessage(void){/* Define the content of the data to be transmitted */const uint32 dataLow = 0xC0CAC01A;const uint32 dataHigh = 0xBA5EBA11;/* Invalidation of the RX message */IfxMultican_Message_init(&g_multican.rxMsg,INVALID_ID_VALUE,INVALID_DATA_VALUE,INVALID_DATA_VALUE,g_multican.canMsgObjConfig.control.messageLen);/* Initialization of the TX message */IfxMultican_Message_init(&g_multican.txMsg,g_multican.canMsgObjConfig.messageId,dataLow,//要传输的数据低位dataHigh,//要传输的数据高位g_multican.canMsgObjConfig.control.messageLen);/* Send the CAN message with the previously defined TX message content */while( IfxMultican_Status_notSentBusy ==IfxMultican_Can_MsgObj_sendMessage(&g_multican.canSrcMsgObj, &g_multican.txMsg) ){}}void initLed(void){/* ======================================================================* Configuration of the pins connected to the LEDs:* ======================================================================* - define the GPIO port* - define the GPIO pin that is the connected to the LED* - define the general GPIO pin usage (no alternate function used)* - define the pad driver strength* ======================================================================*/g_led.led1.port = &MODULE_P00;g_led.led1.pinIndex = PIN5;g_led.led1.mode = IfxPort_OutputIdx_general;g_led.led1.padDriver = IfxPort_PadDriver_cmosAutomotiveSpeed1;g_led.led2.port = &MODULE_P00;g_led.led2.pinIndex = PIN6;g_led.led2.mode = IfxPort_OutputIdx_general;g_led.led2.padDriver = IfxPort_PadDriver_cmosAutomotiveSpeed1;/* Initialize the pins connected to LEDs to level "HIGH"; will keep the LEDs turned off as default state */IfxPort_setPinHigh(g_led.led1.port, g_led.led1.pinIndex);IfxPort_setPinHigh(g_led.led2.port, g_led.led2.pinIndex);/* Set the pin input/output mode for both pins connected to the LEDs */IfxPort_setPinModeOutput(g_led.led1.port, g_led.led1.pinIndex, IfxPort_OutputMode_pushPull, g_led.led1.mode);IfxPort_setPinModeOutput(g_led.led2.port, g_led.led2.pinIndex, IfxPort_OutputMode_pushPull, g_led.led2.mode);/* Set the pad driver mode for both pins connected to the LEDs */IfxPort_setPinPadDriver(g_led.led1.port, g_led.led1.pinIndex, g_led.led1.padDriver);IfxPort_setPinPadDriver(g_led.led2.port, g_led.led2.pinIndex, g_led.led2.padDriver);}
#ifndef MULTICAN_H_#define MULTICAN_H_ 1/*********************************************************************************************************************//*-----------------------------------------------------Includes------------------------------------------------------*//*********************************************************************************************************************/#include "Ifx_Types.h"#include "IfxMultican_Can.h"#include "IfxMultican.h"#include "IfxPort.h" /* For GPIO Port Pin Control *//*********************************************************************************************************************//*------------------------------------------------------Macros-------------------------------------------------------*//*********************************************************************************************************************/#define SRC_MESSAGE_OBJECT_ID (IfxMultican_MsgObjId)0 /* Source message object ID */#define DST_MESSAGE_OBJECT_ID (IfxMultican_MsgObjId)1 /* Destination message object ID */#define CAN_MESSAGE_ID 0x777 /* Message ID that will be used in arbitration phase */#define TX_INTERRUPT_SRC_ID IfxMultican_SrcId_0 /* Transmit interrupt service request ID */#define RX_INTERRUPT_SRC_ID IfxMultican_SrcId_1 /* Receive interrupt service request ID */#define PIN5 5 /* LED1 used in TX ISR is connected to this pin */#define PIN6 6 /* LED2 used in RX ISR is connected to this pin */#define INVALID_DATA_VALUE (uint32)0xDEADBEEF /* Used to invalidate RX message data content */#define INVALID_ID_VALUE (uint32)0xFFFFFFFF /* Used to invalidate RX message ID value */#define ISR_PRIORITY_CAN_TX 2 /* Define the CAN TX interrupt priority */#define ISR_PRIORITY_CAN_RX 1 /* Define the CAN RX interrupt priority *//*********************************************************************************************************************//*--------------------------------------------------Data Structures--------------------------------------------------*//*********************************************************************************************************************/typedef struct{IfxMultican_Can can; /* CAN module handle to HW module SFR set */IfxMultican_Can_Config canConfig; /* CAN module configuration structure */IfxMultican_Can_Node canSrcNode; /* CAN source node handle data structure */IfxMultican_Can_Node canDstNode; /* CAN destination node handle data structure */IfxMultican_Can_NodeConfig canNodeConfig; /* CAN node configuration structure */IfxMultican_Can_MsgObj canSrcMsgObj; /* CAN source message object handle data structure */IfxMultican_Can_MsgObj canDstMsgObj; /* CAN destination message object handle data structure */IfxMultican_Can_MsgObjConfig canMsgObjConfig; /* CAN message object configuration structure */IfxMultican_Message txMsg; /* Transmitted CAN message structure */IfxMultican_Message rxMsg; /* Received CAN message structure */} AppMulticanType;typedef struct{IfxPort_Pin_Config led1; /* LED1 configuration structure */IfxPort_Pin_Config led2; /* LED2 configuration structure */} AppLedType;/*********************************************************************************************************************//*-----------------------------------------------Function Prototypes-------------------------------------------------*//*********************************************************************************************************************/void canIsrTxHandler(void);void canIsrRxHandler(void);void initMultican(void);void transmitCanMessage(void);void initLed(void);#endif /* MULTICAN_H_ */

若有收获,就点个赞吧
0 人点赞
