我们来看看力扣第 787 题「K 站中转内最便宜的航班」,我描述一下题目:
现在有n个城市,分别用0,1…,n - 1这些序号表示,城市之间的航线用三元组[from, to, price]来表示,比如说三元组[0,1,100]就表示,从城市0到城市1之间的机票价格是 100 元。
题目会给你输入若干参数:
正整数n代表城市个数,数组flights装着若干三元组代表城市间的航线及价格,城市编号src代表你所在的城市,城市编号dst代表你要去的目标城市,整数K代表你最多经过的中转站个数。
函数签名如下:
int findCheapestPrice(int n, int[][] flights, int src, int dst, int K);
请你的算法计算,在**K**次中转之内,从**src**到**dst**所需的最小花费是多少钱,如果无法到达,则返回 -1。
比方说题目给的例子:
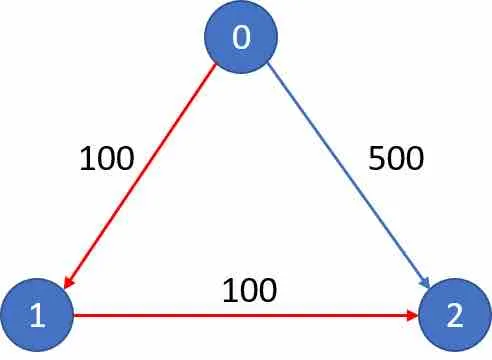
n = 3, flights = [[0,1,100],[1,2,100],[0,2,500]], src = 0, dst = 2, K = 1
航线就是如下这张图所示,有向边代表航线的方向,边上的数字代表航线的机票价格:

出发点是0,到达点是2,允许的最大中转次数K为 1,所以最小的开销就是图中红色的两条边,从0出发,经过中转城市1到达目标城市2,所以算法的返回值应该是 200。
注意这个中转次数的上限K是比较棘手的,如果上述题目将K改为 0,也就是不允许中转,那么我们的算法只能返回 500 了,也就是直接从0飞到2。
很明显,这题就是个加权有向图中求最短路径的问题。
说白了,就是给你一幅加权有向图,让你求src到dst权重最小的一条路径,同时要满足,这条路径最多不能超过**K + 1**条边(经过K个节点相当于经过K + 1条边。
我们来分析下求最短路径相关的算法。
BFS 算法思路
我们前文 BFS 算法框架详解 中说到,求最短路径,肯定可以用 BFS 算法来解决。
因为 BFS 算法相当于从起始点开始,一步一步向外扩散,那当然是离起点越近的节点越先被遍历到,如果 BFS 遍历的过程中遇到终点,那么走的肯定是最短路径。
不过呢,我们在 BFS 算法框架详解 用的是普通的队列Queue来遍历多叉树,而对于加权图的最短路径来说,普通的队列不管用了,得用优先级队列PriorityQueue。
为什么呢?也好理解,在多叉树(或者扩展到无权图)的遍历中,与其说边没有权重,不如说每条边的权重都是 1,起点与终点之间的路径权重就是它们之间「边」的条数。
这样,按照 BFS 算法一步步向四周扩散的逻辑,先遍历到的节点和起点之间的「边」更少,累计的权重当然少。
换言之,先进入Queue的节点就是离起点近的,路径权重小的节点。
但对于加权图,路径中边的条数和路径的权重并不是正相关的关系了,有的路径可能边的条数很少,但每条边的权重都很大,那显然这条路径权重也会很大,很难成为最短路径。
比如题目给的这个例子:
你是可以一步从0走到2,但路径权重不见得是最小的。
所以,对于加权图的场景,我们需要优先级队列「自动排序」的特性,将路径权重较小的节点排在队列前面,以此为基础施展 BFS 算法。
考虑价格不会有负数,优先级队列PriorityQueue+BFS就是Dijkstra 算法:
- 通过给定flights构建一个图
- 从起点开始插入到优先级队列里(小顶堆,取目前最小的价格和)
- 遍历直到优先级队列为空,每次遍历处理如下:
- 是否到了终点,到了,则返回当前价格和
- 是否达到最大中转次数k,超过则不能再继续搜索下去
- 默认找不到则返回-1
class Solution {
public:
int findCheapestPrice(int n, vector<vector<int>>& flights, int src, int dst, int K) {
// 构建图
vector<vector<int>> graph(n, vector<int>(n, 0));
for (auto& flight : flights)
{
graph[flight[0]][flight[1]] = flight[2];
}
// 优先级队列,按照价格的最小堆
auto cmp = [](const vector<int>& a, const vector<int>& b) -> bool
{
return a[1] > b[1];
};
priority_queue<vector<int>, deque<vector<int>>, decltype(cmp)> q(cmp);
// 插入到数组里: 当前点,价格,最大飞行次数(K=0的时候也能至少飞一次,所以是中转次数+1)
q.push({src, 0, K+1});
while (!q.empty())
{
const vector<int>& curr = q.top();
int node = curr[0];
int price = curr[1];
int k = curr[2];
q.pop();
if (node == dst)
{
return price;
}
// 判断是否还可以再飞一次
if (k > 0)
{
// 遍历目前可以达到的边
for (int i = 0; i < n; ++i)
{
if (graph[node][i] > 0)
{
q.push({i, price + graph[node][i], k-1});
}
}
}
}
// 都找不到结果,则返回-1
return -1;
}
};
说了这么多 BFS 算法,只是帮助大家融会贯通一下,我们本文并不准备用 BFS 算法来解决这道题,而是准备用动态规划来解决这道题。
动态规划思路
我们前文 动态规划核心套路详解 中说过,求最值的问题,很多都可能使用动态规划来求解。
加权最短路径问题,再加个K的限制也无妨,不也是个求最值的问题嘛,动态规划统统拿下。
我们先不管**K**的限制,单就「加权最短路径」这个问题来看看,它怎么就是个动态规划问题了呢?
比方说,现在我想计算src到dst的最短路径:
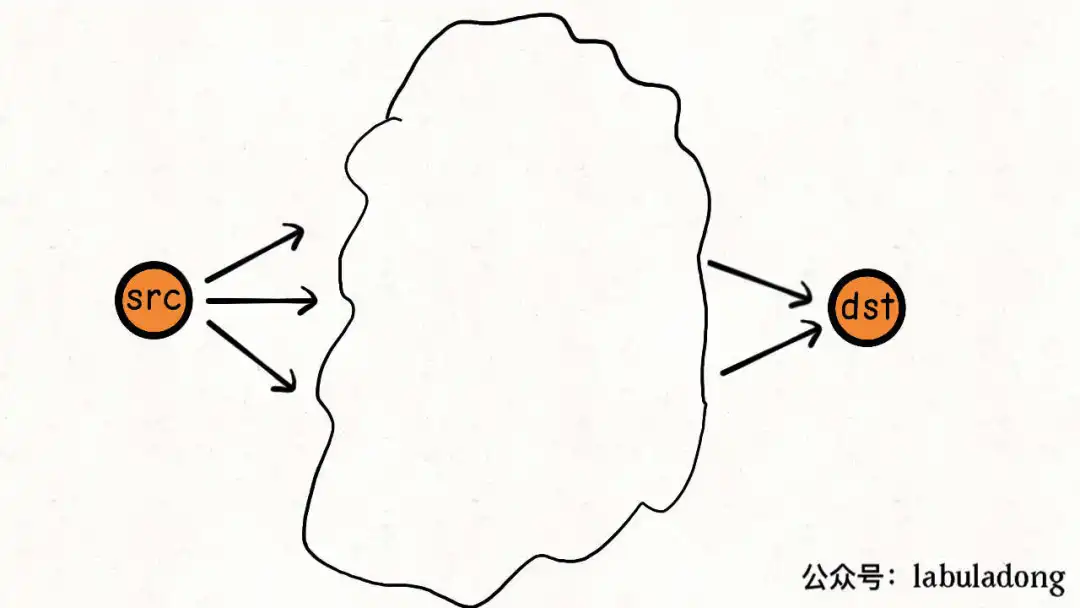
最小权重是多少?我不知道。
但我可以把问题进行分解:
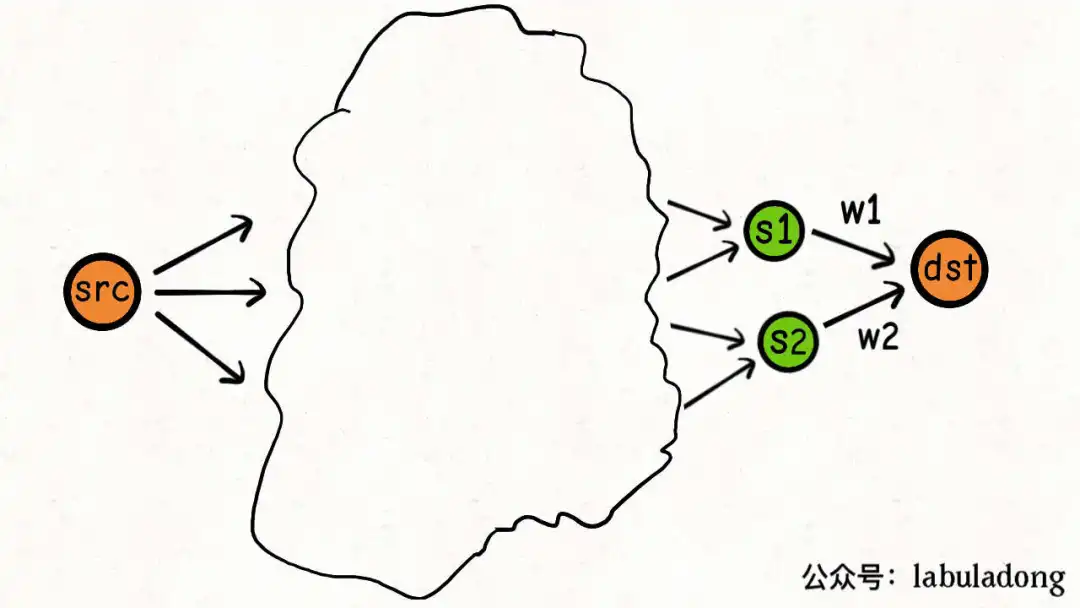
s1, s2是指向dst的相邻节点,它们之间的权重我是知道的,分别是w1, w2。
只要我知道了从src到s1, s2的最短路径,我不就知道src到dst的最短路径了吗!
minPath(src, dst) = min(
minPath(src, s1) + w1,
minPath(src, s2) + w2
)
这其实就是递归关系了,就是这么简单。
不过别忘了,题目对我们的最短路径还有个「路径上不能超过**K + 1**条边」的限制。
那么我们不妨定义这样一个dp函数:
int dp(int s, int k);
函数的定义如下:
从起点**src**出发,**k**步之内(一步就是一条边)到达节点**s**的最小路径权重为**dp(s, k)**。
那么,dp函数的 base case 就显而易见了:
// 定义:从 src 出发,k 步之内到达 s 的最小成本
int dp(int s, int k) {
// 从 src 到 src,一步都不用走
if (s == src) {
return 0;
}
// 如果步数用尽,就无解了
if (k == 0) {
return -1;
}
// ...
}
题目想求的最小机票开销就可以用dp(dst, K+1)来表示:
int findCheapestPrice(int n, int[][] flights, int src, int dst, int K) {
// 将中转站个数转化成边的条数
K++;
//...
return dp(dst, K);
添加了一个K条边的限制,状态转移方程怎么写呢?其实和刚才是一样的:
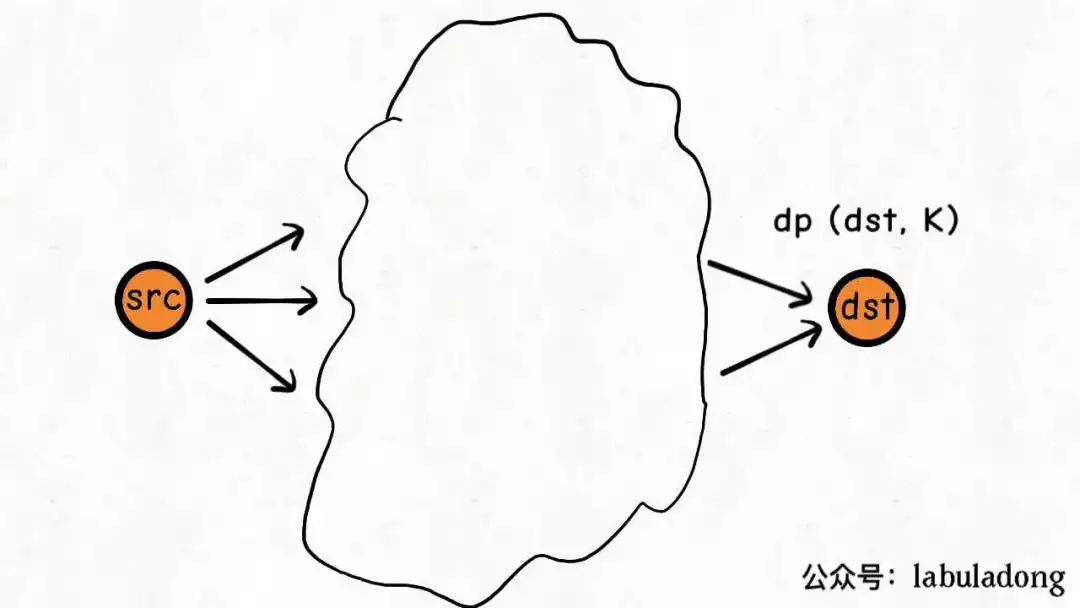
K步之内从src到dst的最小路径权重是多少?我不知道。
但我可以把问题分解:
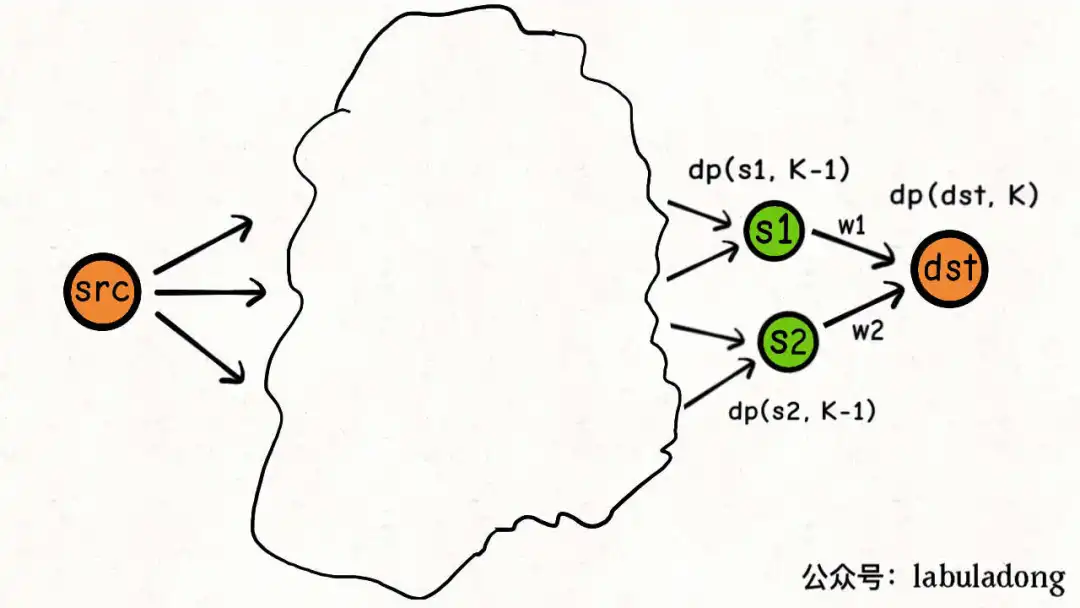
s1, s2是指向dst的相邻节点,我只要能够在K - 1步之内从src到达s1, s2,那我就可以在K步之内从src到达dst。
也就是如下关系式:
dp(dst, k) = min(
dp(s1, k - 1) + w1,
dp(s2, k - 1) + w2
)
这就是新的状态转移方程,如果你能看懂这个算式,就已经可以解决这道题了。
代码实现
根据上述思路,我怎么知道s1, s2是指向dst的相邻节点,他们之间的权重是w1, w2?
我希望给一个节点,就能知道有谁指向这个节点,还知道它们之间的权重,对吧。
专业点说,得用一个数据结构记录每个节点的「入度」indegree:
// 哈希表记录每个点的入度
// to -> [from, price]
HashMap<Integer, List<int[]>> indegree;
int src, dst;
public int findCheapestPrice(int n, int[][] flights, int src, int dst, int K) {
// 将中转站个数转化成边的条数
K++;
this.src = src;
this.dst = dst;
indegree = new HashMap<>();
for (int[] f : flights) {
int from = f[0];
int to = f[1];
int price = f[2];
// 记录谁指向该节点,以及之间的权重
indegree.putIfAbsent(to, new LinkedList<>());
indegree.get(to).add(new int[] {from, price});
}
return dp(dst, K);
}
c++代码
#include<limits.h>
typedef unordered_map<int, vector<vector<int>>> umap2;
int src, dst;
umap2 indegree;
int findCheapestPrice(int n, vector<vector<int>>& flights, int src, int dst, int k) {
k++;
this->src = src;
this->dst = dst;
for(vector<int> f:flights){
int from = f[0];
int to = f[1];
int price = f[2];
// 记录谁指向该节点,以及之间的权重
vector<vector<int>> tmp_list;
unordered_map<int,vector<vector<int>>>::iterator iter;
iter = this->indegree.emplace_hint(indegree.begin(), to, tmp_list);
vector<int> list = {from,price};
iter->second.push_back(list);
}
return dp(this->dst,k);
}
有了indegree存储入度,那么就可以具体实现dp函数了:
// 定义:从 src 出发,k 步之内到达 s 的最短路径权重
int dp(int s, int k) {
// base case
if (s == src) {
return 0;
}
if (k == 0) {
return -1;
}
// 初始化为最大值,方便等会儿取最小值
int res = Integer.MAX_VALUE;
if (indegree.containsKey(s)) {
// 当 s 有入度节点时,分解为子问题
for (int[] v : indegree.get(s)) {
int from = v[0];
int price = v[1];
// 从 src 到达相邻的入度节点所需的最短路径权重
int subProblem = dp(from, k - 1);
// 跳过无解的情况
if (subProblem != -1) {
res = Math.min(res, subProblem + price);
}
}
}
// 如果还是初始值,说明此节点不可达
return res == Integer.MAX_VALUE ? -1 : res;
}
有之前的铺垫,这段解法逻辑应该是很清晰的。当然,对于动态规划问题,肯定要消除重叠子问题。
为什么有重叠子问题?很简单,如果某个节点同时指向两个其他节点,那么这两个节点就有相同的一个入度节点,就会产生重复的递归计算。
怎么消除重叠子问题?找问题的「状态」。
状态是什么?在问题分解(状态转移)的过程中变化的,就是状态。
谁在变化?显然就是**dp**函数的参数**s**和**k**,每次递归调用,目标点**s**和步数约束**k**在变化。
所以,本题的状态有两个,应该算是二维动态规划,我们可以用一个memo二维数组或者哈希表作为备忘录,减少重复计算。
我们选用二维数组做备忘录吧,注意K是从 1 开始算的,所以备忘录初始大小要再加一:
int src, dst;
HashMap<Integer, List<int[]>> indegree;
// 备忘录
int[][] memo;
public int findCheapestPrice(int n, int[][] flights, int src, int dst, int K) {
K++;
this.src = src;
this.dst = dst;
// 初始化备忘录,全部填一个特殊值
memo = new int[n][K + 1];
for (int[] row : memo) {
Arrays.fill(row, -888);
}
// 其他不变
// ...
return dp(dst, K);
}
// 定义:从 src 出发,k 步之内到达 s 的最小成本
int dp(int s, int k) {
// base case
if (s == src) {
return 0;
}
if (k == 0) {
return -1;
}
// 查备忘录,防止冗余计算
if (memo[s][k] != -888) {
return memo[s][k];
}
// 状态转移不变
// ...
// 存入备忘录
memo[s][k] = res == Integer.MAX_VALUE ? -1 : res;
return memo[s][k];
}
备忘录初始值为啥初始为 -888?前文 base case 和备忘录的初始值怎么定 说过,随便初始化一个无意义的值就行。
c++代码
// 定义:从 src 出发,k 步之内到达 s 的最短路径权重
int dp(int s, int k) {
// base case
if (s == src) {
return 0;
}
if (k == 0) { //无解
return -1;
}
// 初始化为最大值,方便等会儿取最小值
int res = INT_MAX;
if (this->indegree.count(s)>0) {
// 当 s 有入度节点时,分解为子问题
for (vector<int> v : indegree.at(s)) {
int from = v[0];
int price = v[1];
// 从 src 到达相邻的入度节点所需的最短路径权重
int subProblem = dp(from, k - 1);
// 跳过无解的情况
if (subProblem != -1) {
res = min(res, subProblem + price);
}
}
}
// 如果还是初始值,说明此节点不可达
return res == INT_MAX ? -1 : res;
}
至此,这道题就通过自顶向下的递归方式解决了。当然,完全可以按照这个解法衍生出自底向上迭代的动态规划解法:
class Solution {
static constexpr int INF = 10000 * 101 + 1;
public:
int findCheapestPrice(int n, vector<vector<int>>& flights, int src, int dst, int k) {
// 定义:从 src 出发,k 步之内到达 s 的最短路径权重 f[k][s]
vector<vector<int>> f(k + 2, vector<int>(n, INF));
f[0][src] = 0;
for (int t = 1; t <= k + 1; ++t) {
for (auto&& flight: flights) {
int from = flight[0], to = flight[1], cost = flight[2];
f[t][to] = min(f[t][to], f[t - 1][from] + cost);
}
}
int ans = INF;
for (int t = 1; t <= k + 1; ++t) {
ans = min(ans, f[t][dst]);
}
return (ans == INF ? -1 : ans);
}
};
下面的代码使用两个一维数组进行状态转移。
class Solution {
private:
static constexpr int INF = 10000 * 101 + 1;
public:
int findCheapestPrice(int n, vector<vector<int>>& flights, int src, int dst, int k) {
vector<int> f(n, INF);
f[src] = 0;
int ans = INF;
for (int t = 1; t <= k + 1; ++t) {
vector<int> g(n, INF);
for (auto&& flight: flights) {
int j = flight[0], i = flight[1], cost = flight[2];
g[i] = min(g[i], f[j] + cost);
}
f = move(g);
ans = min(ans, f[dst]);
}
return (ans == INF ? -1 : ans);
}
};
其实,大家如果把我们号之前的所有动态规划文章都看一遍,就会发现我们一直在套用 动态规划核心套路,其实真没什么困难的。

若有收获,就点个赞吧
0 人点赞
