1. 概述
在⼀个表示⼯程的带权有向图中,⽤顶点表示事件,⽤有向边表示活动,⽤边上的权值表示活动的持续时间,这种有向图的边表表示活动的⽹,我们称之为AOE⽹(Activity On Edge Network)
和
AOV网的区别在于权值,AOV网的边上没有权值,它在执行任务时只考虑先后顺序符合
AOE网的前提条件是,必须也要符合AOV网。在有权值的同时,任务之间也要有先后顺序
1.1 名词解释
由于⼀个⼯程,总有⼀个开始和⼀个结束,所以正常情况下,
AOE⽹只有⼀个源点和⼀个汇点没有⼊边的顶点称为始点或源点,即:入度为
0没有出边的顶点称为终点或汇点,即:出度为
0
路径上各个活动所持续的时间之和称为路径⻓度
从源点到汇点具有最⼤的路径叫关键路径
在关键路径上的活动叫关键活动
例如: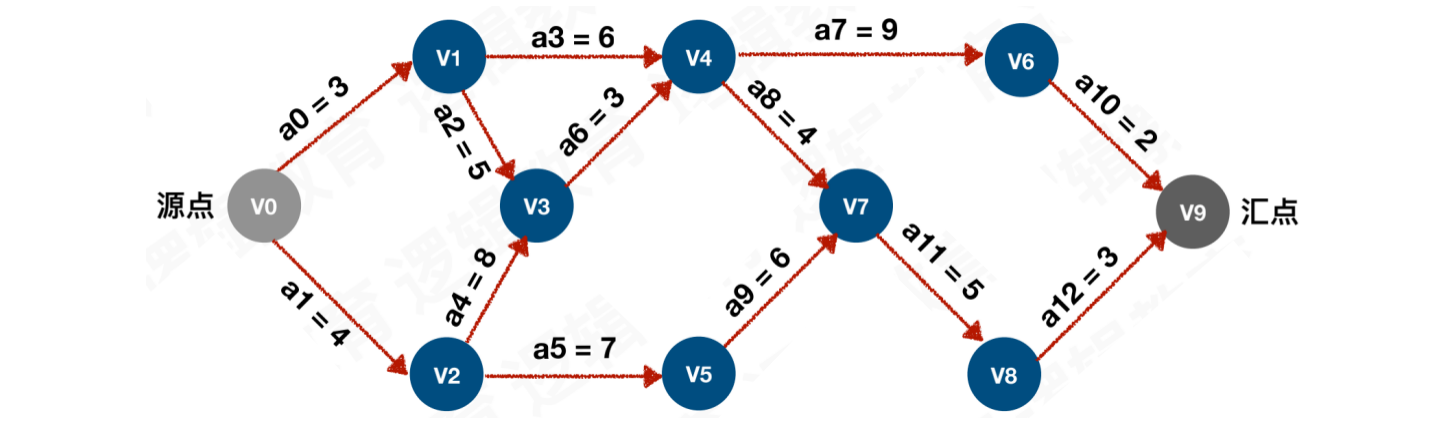
顶点
V0入度为0,即:V0为源点顶点
V9出度为0,即:V9为汇点
1.2 关键路径
假设:造⼀辆汽⻋,我们需要先造各种各样的零件、部件,最终才能完成汽⻋的组装
如图:这些零部件基本都是在流⽔线同时⽣产的。假如造⼀个轮⼦,需要0.5天的时间,造⼀个发动机需要3天时间,造⼀个⻋底盘需要2天时间,其他零部件需要2天时间,全部零部件集中到⼀处需要0.5天,组装成汽⻋需要2天时间,请问⼀个汽⻋⼚造⼀台汽⻋,最短需要多⻓时间?
合理的做法:我们应该并行生产所需的零部件,在造发动机的3天时间中,可以生产6个轮⼦,并且同时生产底盘和其他零部件。当生成结束后,花费0.5天将零部件集中,再花费2天组装成汽⻋,最短需要5.5天
使用AOE⽹图显示: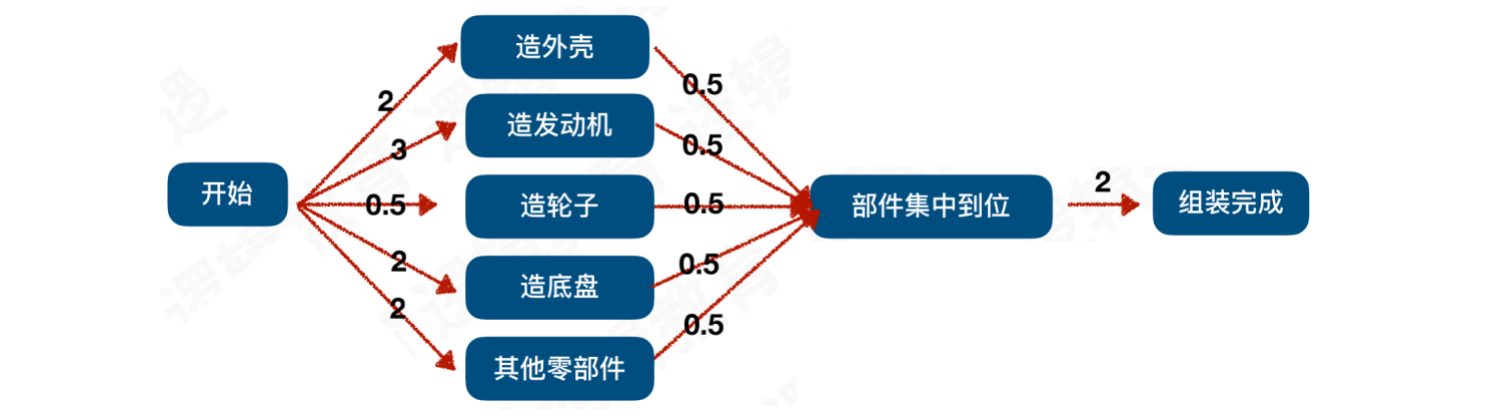
- 此图的关键路径,找到能够覆盖所有活动的最大路径。即:造发动机 → 部件集中 →组装
求解关键路径的目的:如果我们要对工厂制造汽车的工期进行优化,我们需要优化造发动机的时间,只有将耗时最长的任务优化,才能提升整体工期
1.3 核⼼参数
事件最早发⽣的时间
etv(earliest time of vertex):即顶点Vk的最早发⽣时间事件最晚发⽣时间
ltv(latest time of vertex):即顶点Vk的最晚发⽣时间,也就是每个顶点对应的事件最晚需要开始的时间,超出此时间将会延误整个⼯期活动的最早开⼯时间
ete(earliest time of edge):即弧Ak的最早发⽣时间活动的最晚开⼯时间
lte(latest time of edge):即弧Ak的最晚发⽣时间,也就是不推迟⼯期的最晚开⼯时间
2. 求解etv
事件最早发⽣的时间etv(earliest time of vertex):即顶点Vk的最早发⽣时间
2.1 算法解析
以此图为例: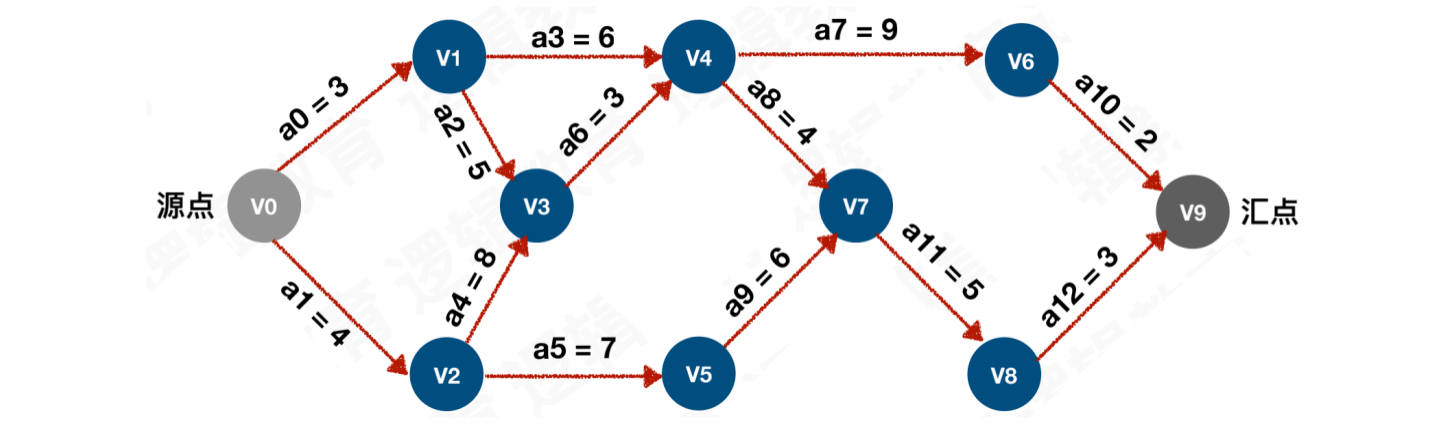
- 求解事件的最早发⽣时间
etv的过程,就是从头到尾去找拓扑序列的过程。所以在求解关键路径之前,我们需要调⽤⼀次拓扑排序的序列,同时计算etv和拓扑序列列表
求解顶点V3的最早发生时间: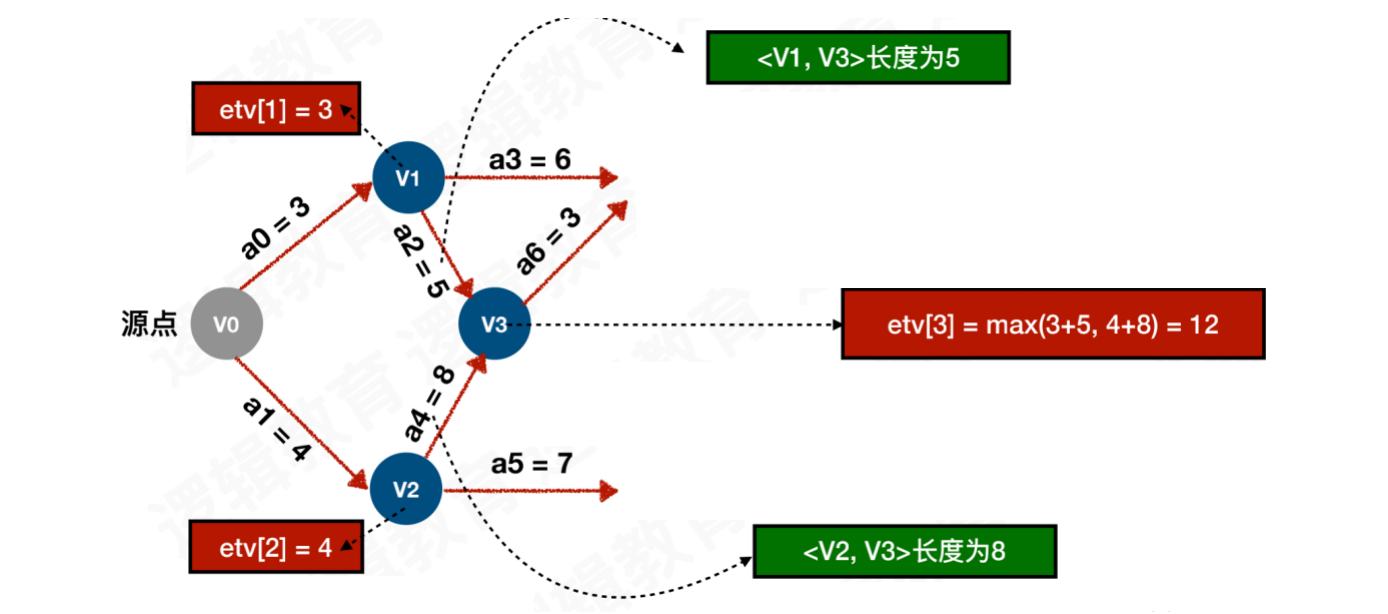
V3⼊边的顶点分别为V1和V2,其中V1 → V3 = 5,V2 → V3 = 8。求解V3的耗时,还需要加上V1和V2的事件的耗时V0 → V1 → V3 = 3 + 5 = 8V0 → V2 → V3 = 4 + 8 = 12
找到事件的耗时,例如要完成
V3,需要V1、V2两个条件同时达成。那么V1需要8⼩时,而V2需要12⼩时,此时完成V3必须等待12⼩时。所以寻找事件的耗时,需要选择耗时更⻓的为最早发⽣时间
公式推演: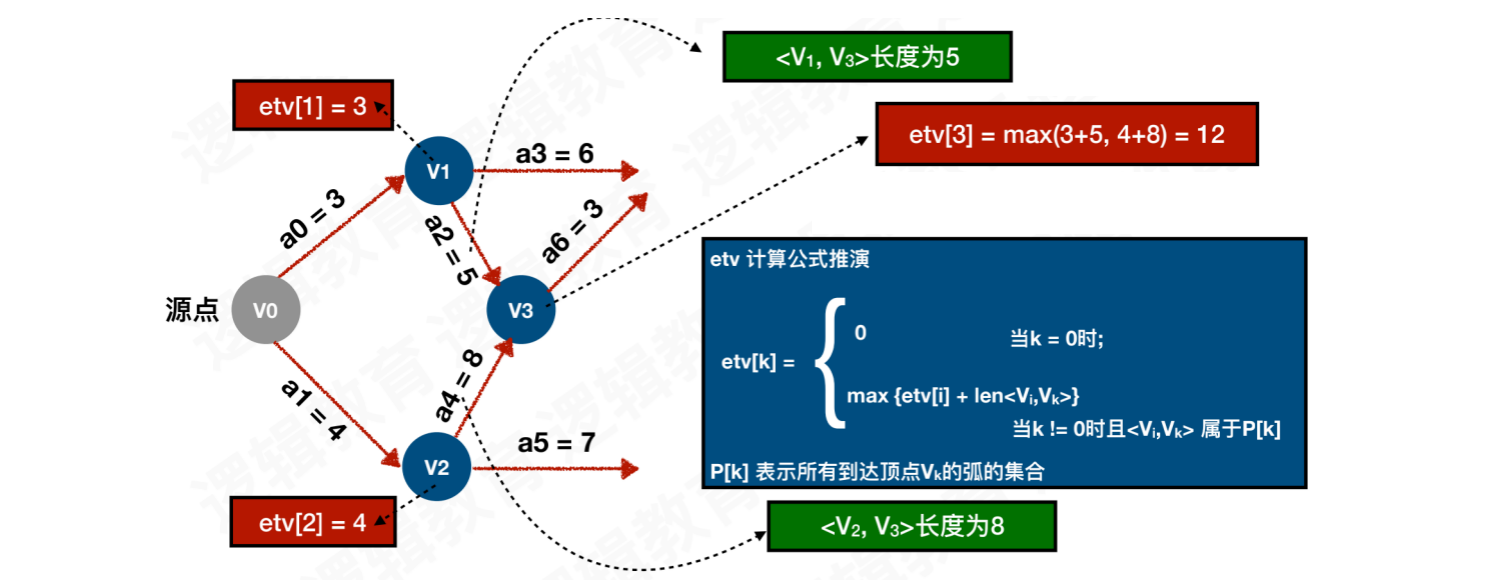
当
k == 0时,顶点Vk的入度为0,故此Vk的etv也为0当
入度 > 0时,需要使用入边的顶点Vi所需的etv值,加上Vi → Vk的权值。如果有多条到达Vk的弧,选择最大的etv结果
2.2 代码实现
创建AoeGraphLinked类,定义数据结构:
class AoeGraphLinked {fileprivate class Node {var adj_vex_index : Int?;var weight : Int?;var data : String?;var next : Node?;}fileprivate class VNode {var inDegree : Int;var data : String?;var firstEdge : Node?;init(){self.inDegree = 0;}}fileprivate class Graph {var adjList : [VNode]?;var arc_num : Int;var node_num : Int;init(){self.arc_num = 0;self.node_num = 0;}}fileprivate var graph : Graph;init(){self.graph = Graph();}}
实现创建和打印方法:
class AoeGraphLinked {
func create(nodes : [String], arcs : [[Int]]) {
self.graph.arc_num = arcs.count;
self.graph.node_num = nodes.count;
self.graph.adjList = [VNode]();
for data in nodes {
let vNode = VNode();
vNode.data = data;
self.graph.adjList?.append(vNode);
}
for arc in arcs {
let i = arc[0];
let j = arc[1];
let w = arc[2];
let node = Node();
node.adj_vex_index = j;
node.weight = w;
node.data = self.graph.adjList![j].data;
self.graph.adjList![j].inDegree += 1;
let vNode = self.graph.adjList![i];
node.next = vNode.firstEdge;
vNode.firstEdge = node;
}
}
func traverse() -> String {
var str : String = "";
for vNode in self.graph.adjList! {
var node = vNode.firstEdge;
str += "入度:\(vNode.inDegree),\(vNode.data!)"
while(node != nil){
str += " -> \(node!.data!)【权值:\(node!.weight!)】";
node = node?.next;
}
str += "\n";
}
return str;
}
}
Aoe网图是在Aov网图的基础上增加权值,所以在拓扑排序的同时时,可以进行etv的求解:
class AoeGraphLinked {
// 存储入度为0的顶点
fileprivate var stack : LinearStack<Int>?;
// 存储拓扑排序的结果
fileprivate var topResult_stack : LinearStack<Int>?;
// 存储etv的结果
fileprivate var etv : [Int]?;
// 完成拓扑排序,同时求解etv
func topologicalSort() -> String {
var str : String = "";
self.stack = LinearStack<Int>.init(capacity: self.graph.adjList!.count);
self.topResult_stack = LinearStack<Int>.init(capacity: self.graph.adjList!.count);
self.etv = [Int].init(repeating: 0, count: self.graph.adjList!.count);
// 1、将入度为0的顶点对应的索引值入栈
for i in 0 ..< self.graph.adjList!.count {
let vNode = self.graph.adjList![i];
if(vNode.inDegree > 0){
continue;
}
self.stack!.push(element: i);
}
var count = 0;
// 2、遍历stack
while(!self.stack!.isEmpty()) {
// 将数据依次出栈,并且count++
let i = self.stack!.pop()!;
count += 1;
// 通过索引在顶点表中获取顶点
let vNode = self.graph.adjList![i];
str += "\(vNode.data!) -> ";
// 存储拓扑排序的结果
self.topResult_stack?.push(element: i);
// 获取顶点指向边表中的头结点
var node = vNode.firstEdge;
// 遍历边表中的顶点
while(node != nil){
let k = node!.adj_vex_index!;
// 将顶点的入度-1
let vNode = self.graph.adjList![k];
vNode.inDegree -= 1;
// 如果-1后顶点的入度为0,将其索引值入栈
if(vNode.inDegree == 0){
self.stack!.push(element: k);
}
// 3、求解etv,存储etv的结果
if(self.etv![i] + node!.weight! > self.etv![k]){
self.etv![k] = self.etv![i] + node!.weight!;
}
node = node?.next;
}
}
// 4、判断输出的顶点是否为正确的拓扑排序
if(count < self.graph.node_num){
self.topResult_stack?.clear();
str = "执行失败,图结构非AOV网图";
}
return str;
}
}
3. 求解ltv
事件最晚发⽣时间ltv(latest time of vertex):即顶点Vk的最晚发⽣时间,也就是每个顶点对应的事件最晚需要开始的时间,超出此时间将会延误整个⼯期
3.1 算法解析
【初始化】定义ltv数组,用于存储事件最晚发⽣时间。默认使用etv中最后事件的时间填充ltv数组,然后按照拓扑排序的结果遍历顶点,并依次计算各顶点对应的ltv值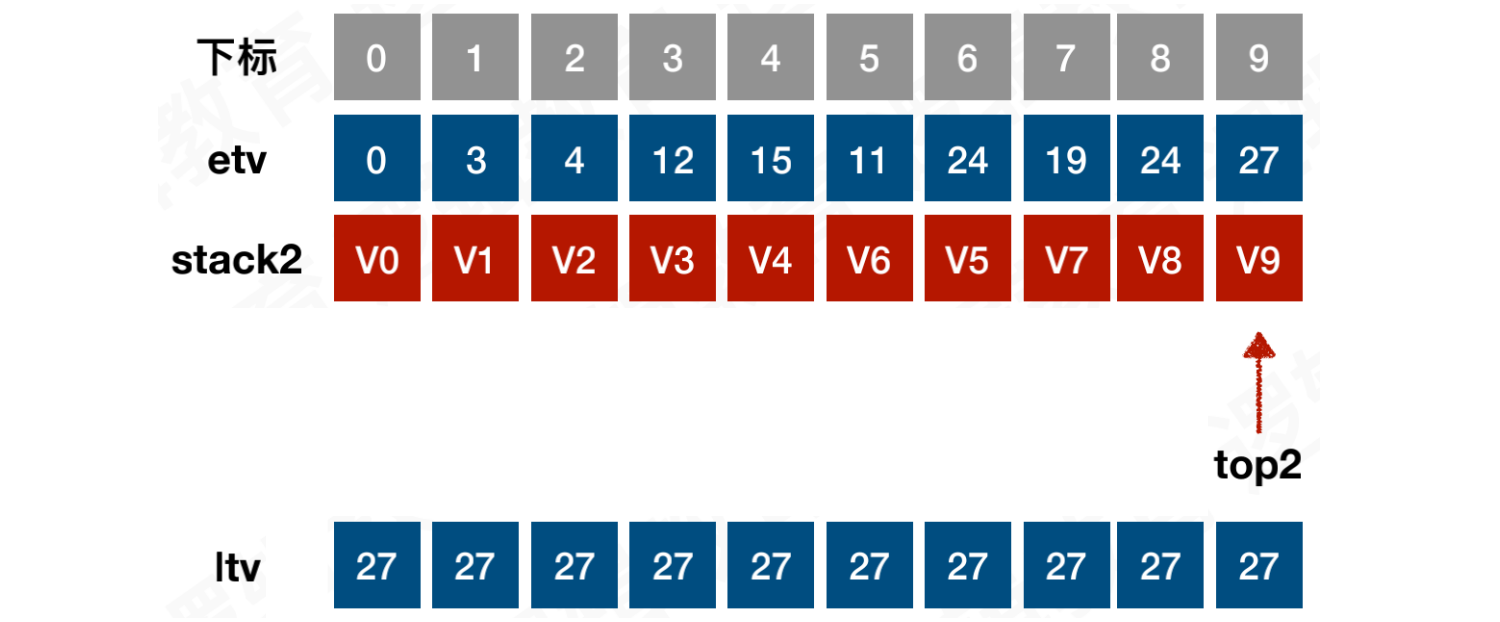
【第一次执行】遍历stack2栈,栈顶gettop = 9出栈
由于V9没有弧表,则没有相关的ltv更新
ltv = [27, 27, 27, 27, 27, 27, 27, 27, 27, 27]
【第二次执行】遍历stack2栈,栈顶gettop = 8出栈
V8连接V9,权重为3,更新ltv[8] = ltv[9] - node.weight = 27 - 3 = 24
ltv = [27, 27, 27, 27, 27, 27, 27, 27, 24, 27]
【第三次执行】遍历stack2栈,栈顶gettop = 7出栈
V7连接V8,权重为5,更新ltv[7] = ltv[8] - node.weight = 24 - 5 = 19
ltv = [27, 27, 27, 27, 27, 27, 27, 19, 24, 27]
【第四次执行】遍历stack2栈,栈顶gettop = 5出栈
V5连接V7,权重为6,更新ltv[5] = ltv[7] - node.weight = 19 - 6 = 13
ltv = [27, 27, 27, 27, 27, 13, 27, 19, 24, 27]
【第五次执行】遍历stack2栈,栈顶gettop = 6出栈
V6连接V9,权重为2,更新ltv[6] = ltv[9] - node.weight = 27 - 2 = 25
ltv = [27, 27, 27, 27, 27, 13, 25, 19, 24, 27]
【第六次执行】遍历stack2栈,栈顶gettop = 4出栈
V4分别连接V6和V7,权重为9和4。分别计算出V4 → V6与V4 → V7的值,选择其中最小的ltv
V4 → V6 = ltv[6] - node.weight = 25 - 9 = 16V4 → V7 = ltv[7] - node.weight = 19 - 4 = 15
更新ltv[4] = min(19 - 4, 25 - 9) = 15
ltv = [27, 27, 27, 27, 15, 13, 25, 19, 24, 27]
【第七次执行】遍历stack2栈,栈顶gettop = 3出栈
V3连接V4,权重为3,更新ltv[3] = ltv[4] - node.weight = 15 - 3 = 12
ltv = [27, 27, 27, 12, 15, 13, 25, 19, 24, 27]
【第八次执行】遍历stack2栈,栈顶gettop = 2出栈
V2分别连接V3和V5,权重为8和7。分别计算出V2 → V3与V2 → V5的值,选择其中最小的ltv
V2 → V3 = ltv[3] - node.weight = 12 - 8 = 4V2 → V5 = ltv[5] - node.weight = 13 - 7 = 4
更新ltv[2] = min(12 - 8, 13 - 7) = 4
ltv = [27, 27, 4, 12, 15, 13, 25, 19, 24, 27]
【第九次执行】遍历stack2栈,栈顶gettop = 1出栈
V1分别连接V3和V4,权重为5和6。分别计算出V1 → V3与V1 → V4的值,选择其中最小的ltv
V1 → V3 = ltv[3] - node.weight = 12 - 5 = 7V1 → V4 = ltv[4] - node.weight = 15 - 6 = 9
更新ltv[1] = min(12 - 5, 15 - 6) = 7
ltv = [27, 7, 4, 12, 15, 13, 25, 19, 24, 27]
【第十次执行】遍历stack2栈,栈顶gettop = 0出栈
V0分别连接V1和V2,权重为3和4。分别计算出V0 → V1与V0 → V2的值,选择其中最小的ltv
V0 → V1 = ltv[1] - node.weight = 7 - 3 = 4V0 → V2 = ltv[1] - node.weight = 4 - 4 = 0
更新ltv[0] = min(7 - 3, 4 - 4) = 0
ltv = [0, 7, 4, 12, 15, 13, 25, 19, 24, 27]
公式推演: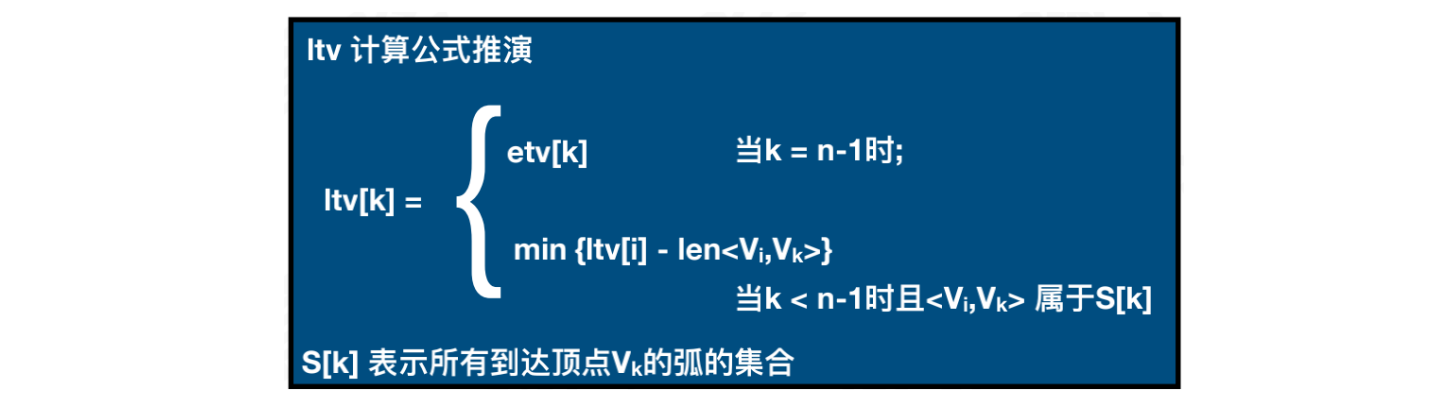
当
k == n - 1时,顶点Vk的出度为0,故此Vk的ltv等于etv[k]当
出度 > 0时,使用出边的顶点Vi所需的ltv值,减去Vi → Vk的权值。如果有多条到达Vk的弧,选择最小的ltv结果
3.2 代码实现
实现求解事件最晚开始时间的方法:
class AoeGraphLinked {
// 存储ltv的结果
fileprivate var ltv : [Int]?;
// 求解ltv
fileprivate func solveLtv(){
// 默认使用etv中最后事件的时间填充
self.ltv = [Int].init(repeating: etv!.last!, count: self.graph.node_num);
// 按照拓扑排序的结果遍历顶点
while(!self.topResult_stack!.isEmpty()){
let k = self.topResult_stack!.pop()!;
// 当k == n - 1时,Vk的ltv等于etv[k]
if(k == self.graph.node_num - 1){
continue;
}
// 获得顶点
let vNode = self.graph.adjList![k];
// 获得边表中头结点
var node = vNode.firstEdge;
// 遍历边表
while(node != nil){
let i = node!.adj_vex_index!;
let i_ltv = self.ltv![i];
// 使用出边的顶点Vi所需的ltv值,减去Vi → Vk的权值
let tmp_ltv = i_ltv - node!.weight!;
// 如果有多条到达Vk的弧,选择最小的ltv结果
if(tmp_ltv < self.ltv![k]){
self.ltv![k] = tmp_ltv;
}
node = node?.next;
}
}
}
}
4. 求解关键路径
拓扑序列:指的是事件在执⾏的顺序
关键活动:指的是从开始到结束具有最⼤⻓度的路径叫关键路径,⽽关键路径上的的活动叫做关键活动
示例中,
V2是关键活动,因为V2的所需时间大于V1,所以当V2完成时,V1已经完成V3、V4也是关键活动,因为V2 → V3 → V4 → V7所需时间大于V2 → V5 → V7,所以当V3、V4完成时,V5已经完成。同样
V4 → V7 → V8 → V9和V4 → V6 → V9所需时间相同,当V7、V8完成时,V6也能同时完成
如图:
ete表示活动Vk → Vj的最早开⼯时间,是针对这条弧来说的。⽽这条弧的弧尾顶点Vk的事件发⽣了,它才可以发⽣。因此ete = etv[k]lte表示活动Vk → Vj的最晚开⼯时间,但此活动再晚也不能等Vj事件发⽣才开始,⽽是必须在Vj事件之前发⽣。所以lte = ltv[j] - len<Vk, Vj>例如,我们需要
2⼩时完成作业,并且必须在23点睡觉。所以我们不能在23点才开始做作业,⽽是必须提前2⼩时在21点开始,才能按计划在23点睡觉所以, 如果判断
ete与lte是否相等,相等就意味着活动之间没有任何空闲时间,则它是关键活动,否则不是
4.1 算法解析
当我们计算出所有顶点的etv和ltv后,开始所有顶点的遍历
【第一次执行】当k == 0时,ete = etv[0] = 0。顶点V0连接V1和V2,分别计算它们的lte值:
V0 → V1权值为3,ltv[1] = 7,lte = 7 - 3 = 4,由于0 != 4,所以V0 → V1不是关键路径V0 → V2权值为4,ltv[2] = 4,lte = 4 - 4 = 0,由于0 == 0,所以V0 → V2是关键路径
【第二次执行】当k == 1时,ete = etv[1] = 3。顶点V1连接V3和V4,分别计算它们的ltv:
V1 → V3权值为5,ltv[3] = 12,lte = 12 - 5 = 7,由于3 != 7,所以V1 → V3不是关键路径V1 → V4权值为6,ltv[4] = 15,lte = 15 - 6 = 9,由于3 != 9,所以V1 → V4不是关键路径
【第三次执行】当k == 2时,ete = etv[2] = 4。顶点V2连接V3和V5,分别计算它们的ltv:
V2 → V3权值为8,ltv[3] = 12,lte = 12 - 8 = 4,由于4 == 4,所以V2 → V3是关键路径V2 → V5权值为7,ltv[5] = 15,lte = 15 - 7 = 8,由于8 != 4,所以V2 → V5不是关键路径
【第四次执行】当k == 3时,ete = etv[3] = 12。顶点V3连接V4,分别计算它们的ltv:
V3 → V4权值为3,ltv[4] = 15,lte = 15 - 3 = 12,由于12 == 12,所以V3 → V4是关键路径
【第五次执行】当k == 4时,ete = etv[4] = 15。顶点V4连接V6和V7,分别计算它们的ltv:
V4 → V6权值为9,ltv[6] = 25,lte = 25 - 9 = 16,由于16 != 15,所以V4 → V6不是关键路径V4 → V7权值为4,ltv[7] = 19,lte = 19 - 4 = 15,由于15 == 15,所以V4 → V7是关键路径
【第六次执行】当k == 5时,ete = etv[5] = 11。顶点V5连接V7,分别计算它们的ltv:
V5 → V7权值为6,ltv[7] = 19,lte = 19 - 6 = 13,由于13 != 11,所以V5 → V7不是关键路径
【第七次执行】当k == 6时,ete = etv[6] = 24。顶点V6连接V9,分别计算它们的ltv:
V6 → V9权值为2,ltv[9] = 27,lte = 27 - 2 = 25,由于25 != 24,所以V6 → V9不是关键路径
【第八次执行】当k == 7时,ete = etv[7] = 19。顶点V7连接V8,分别计算它们的ltv:
V7 → V8权值为5,ltv[8] = 24,lte = 24 - 5 = 19,由于19 == 19,所以V7 → V8是关键路径
【第九次执行】当k == 8时,ete = etv[8] = 24。顶点V8连接V9,分别计算它们的ltv:
V8 → V9权值为3,ltv[9] = 27,lte = 27 - 3 = 24,由于24 == 24,所以V8 → V9是关键路径
【第十次执行】当k == 9时,ete = etv[9] = 27。V9为汇点,跳过该循环
4.2 代码实现
实现求解关键路径的方法:
class AoeGraphLinked {
// 求解关键路径
func criticalPath() -> String {
var str : String = "";
// 1、完成拓扑排序,同时计算etv
print("拓扑排序:\(topologicalSort())\n");
// 2、计算ltv
solveLtv();
print("etv:\(self.etv!)");
print("ltv:\(self.ltv!)\n");
// 3、遍历所以顶点
for k in 0 ..< self.graph.node_num {
// 获取ete
let ete = self.etv![k];
// 获取顶点
let vNode = self.graph.adjList![k];
// 获取边表的头结点
var node = vNode.firstEdge;
// 遍历边表结点
while(node != nil) {
let j = node!.adj_vex_index!;
// 获取ltv
let ltv = self.ltv![j];
// 计算lte
let lte = ltv - node!.weight!;
// 相等,表示Vk → Vj是关键路径
if(ete == lte){
if(str.isEmpty){
str += "\(vNode.data!)";
}
str += " -> \(node!.data!)";
}
// 遍历下一个结点
node = node?.next;
}
}
return str;
}
}
按照示例中的AOE网图逻辑,使用代码创建邻接表,并打印关键路径:
let nodes = ["V0", "V1", "V2", "V3", "V4", "V5", "V6", "V7", "V8", "V9"];
let arcs = [[0, 1, 3], [0, 2, 4],
[1, 3, 5], [1, 4, 6],
[2, 3, 8], [2, 5, 7],
[3, 4, 3],
[4, 6, 9], [4, 7, 4],
[5, 7, 6],
[6, 9, 2],
[7, 8, 5],
[8, 9, 3]];
let aoeGraphLinked = AoeGraphLinked();
aoeGraphLinked.create(nodes: nodes, arcs: arcs);
print(aoeGraphLinked.traverse());
print("关键路径:\(aoeGraphLinked.criticalPath())");
-------------------------
//输出以下内容:
入度:0,V0 -> V2【权值:4】 -> V1【权值:3】
入度:1,V1 -> V4【权值:6】 -> V3【权值:5】
入度:1,V2 -> V5【权值:7】 -> V3【权值:8】
入度:2,V3 -> V4【权值:3】
入度:2,V4 -> V7【权值:4】 -> V6【权值:9】
入度:1,V5 -> V7【权值:6】
入度:1,V6 -> V9【权值:2】
入度:2,V7 -> V8【权值:5】
入度:1,V8 -> V9【权值:3】
入度:2,V9
拓扑排序:V0 -> V1 -> V2 -> V3 -> V4 -> V6 -> V5 -> V7 -> V8 -> V9 ->
etv:[0, 3, 4, 12, 15, 11, 24, 19, 24, 27]
ltv:[0, 7, 4, 12, 15, 13, 25, 19, 24, 27]
关键路径:V0 -> V2 -> V3 -> V4 -> V7 -> V8 -> V9
4.3 时间复杂度
顶点表长度为n,边表长度为e
拓扑排序的时间复杂度:O(n + e)
初始化
ltv时间复杂度:O(n)计算
ltv的时间复杂度:O(n + e)计算
ete、lte时间复杂度:O(n + e)所以最终求解关键路径的时间复杂度为:O(n + e)
总结
概述:
在⼀个表示⼯程的带权有向图中,⽤顶点表示事件,⽤有向边表示活动,⽤边上的权值表示活动的持续时间,这种有向图的边表表示活动的⽹,我们称之为AOE⽹(Activity On Edge Network)
和
AOV网的区别在于权值,AOV网的边上没有权值,它在执行任务时只考虑先后顺序符合
AOE网的前提条件是,必须也要符合AOV网。在有权值的同时,任务之间也要有先后顺序
名词解释:
由于⼀个⼯程,总有⼀个开始和⼀个结束,所以正常情况下,
AOE⽹只有⼀个源点和⼀个汇点没有⼊边的顶点称为始点或源点,即:入度为
0没有出边的顶点称为终点或汇点,即:出度为
0
路径上各个活动所持续的时间之和称为路径⻓度
从源点到汇点具有最⼤的路径叫关键路径
在关键路径上的活动叫关键活动
核⼼参数:
事件最早发⽣的时间
etv(earliest time of vertex):即顶点Vk的最早发⽣时间事件最晚发⽣时间
ltv(latest time of vertex):即顶点Vk的最晚发⽣时间,也就是每个顶点对应的事件最晚需要开始的时间,超出此时间将会延误整个⼯期活动的最早开⼯时间
ete(earliest time of edge):即弧Ak的最早发⽣时间活动的最晚开⼯时间
lte(latest time of edge):即弧Ak的最晚发⽣时间,也就是不推迟⼯期的最晚开⼯时间
求解etv:
求解事件的最早发⽣时间
etv的过程,就是从头到尾去找拓扑序列的过程。所以在求解关键路径之前,我们需要调⽤⼀次拓扑排序的序列,同时计算etv和拓扑序列列表公式推演:
当
k == 0时,顶点Vk的入度为0,故此Vk的etv也为0当
入度 > 0时,需要使用入边的顶点Vi所需的etv值,加上Vi → Vk的权值。如果有多条到达Vk的弧,选择最大的etv结果
求解ltv:
定义
ltv数组,用于存储事件最晚发⽣时间。默认使用etv中最后事件的时间填充ltv数组,然后按照拓扑排序的结果遍历顶点,并依次计算各顶点对应的ltv值公式推演:
当
k == n - 1时,顶点Vk的出度为0,故此Vk的ltv等于etv[k]当
出度 > 0时,使用出边的顶点Vi所需的ltv值,减去Vi → Vk的权值。如果有多条到达Vk的弧,选择最小的ltv结果
求解关键路径:
ete表示活动Vk → Vj的最早开⼯时间,是针对这条弧来说的。⽽这条弧的弧尾顶点Vk的事件发⽣了,它才可以发⽣。因此ete = etv[k]lte表示活动Vk → Vj的最晚开⼯时间,但此活动再晚也不能等Vj事件发⽣才开始,⽽是必须在Vj事件之前发⽣。所以lte = ltv[j] - len<Vk, Vj>例如,我们需要
2⼩时完成作业,并且必须在23点睡觉。所以我们不能在23点才开始做作业,⽽是必须提前2⼩时在21点开始,才能按计划在23点睡觉所以, 如果判断
ete与lte是否相等,相等就意味着活动之间没有任何空闲时间,则它是关键活动,否则不是时间复杂度
拓扑排序的时间复杂度:O(n + e)
初始化
ltv时间复杂度:O(n)计算
ltv的时间复杂度:O(n + e)计算
ete、lte时间复杂度:O(n + e)所以最终求解关键路径的时间复杂度为:O(n + e)

若有收获,就点个赞吧
0 人点赞
