实现效果
小车显示屏上会实时显示检测的地图,结合程序内置的算法自动巡线。
编写程序
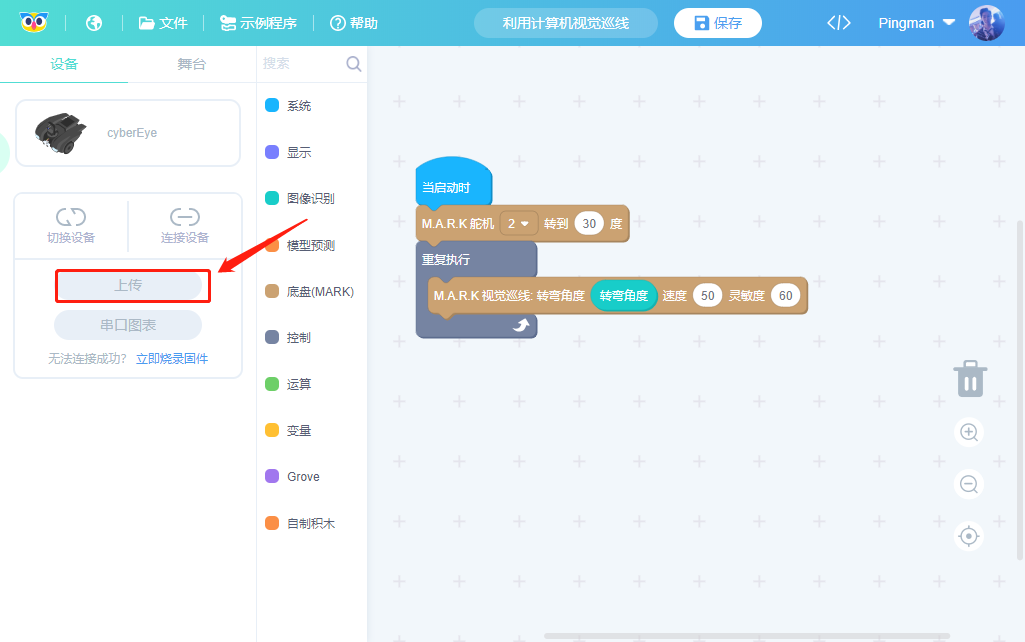
在软件左侧点击“切换设备”将设备切换到“M.A.R.K(cyberEye)”
点击积木导航区“系统”,将积木块“当启动时”拖拽至程序编辑区;点击积木导航区“M.A.R.K”,将程序块“M.A.R.K舵机转到90度”拖放至“当启动时”下方;添加重复执行语句,将视觉巡线积木块放置重复执行中;最后将“转弯角度”放在视觉巡线积木块中。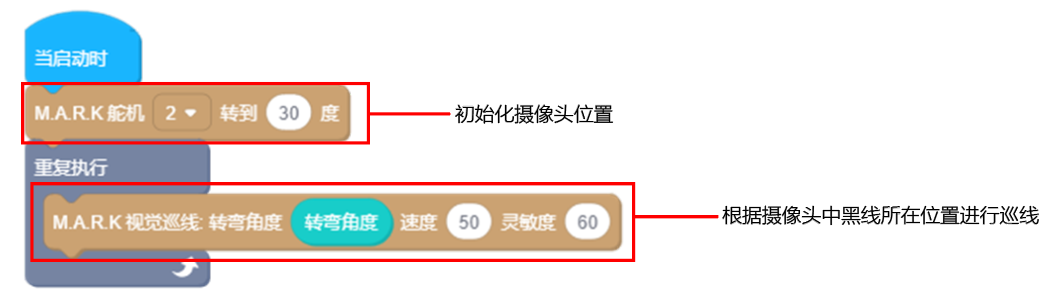
下载 Codecraft 源程:project_2_1.zip
硬件连接
打开电源开关,利用 Type-C USB 线将小车连接电脑。
上传程序
先点击软件左侧的连接设备,在弹出的窗口中选择2个COM口中较小的一个(比如:出现COM2和COM3那么选择COM2)然后点击“连接”成功连接之后点击下方的“上传”,上传所编写程序。
实验程序
将小车放置于地图上,并打开M.A.R.K小车底部的电源开关,观察小车是否可以自动巡线。

若有收获,就点个赞吧
0 人点赞
