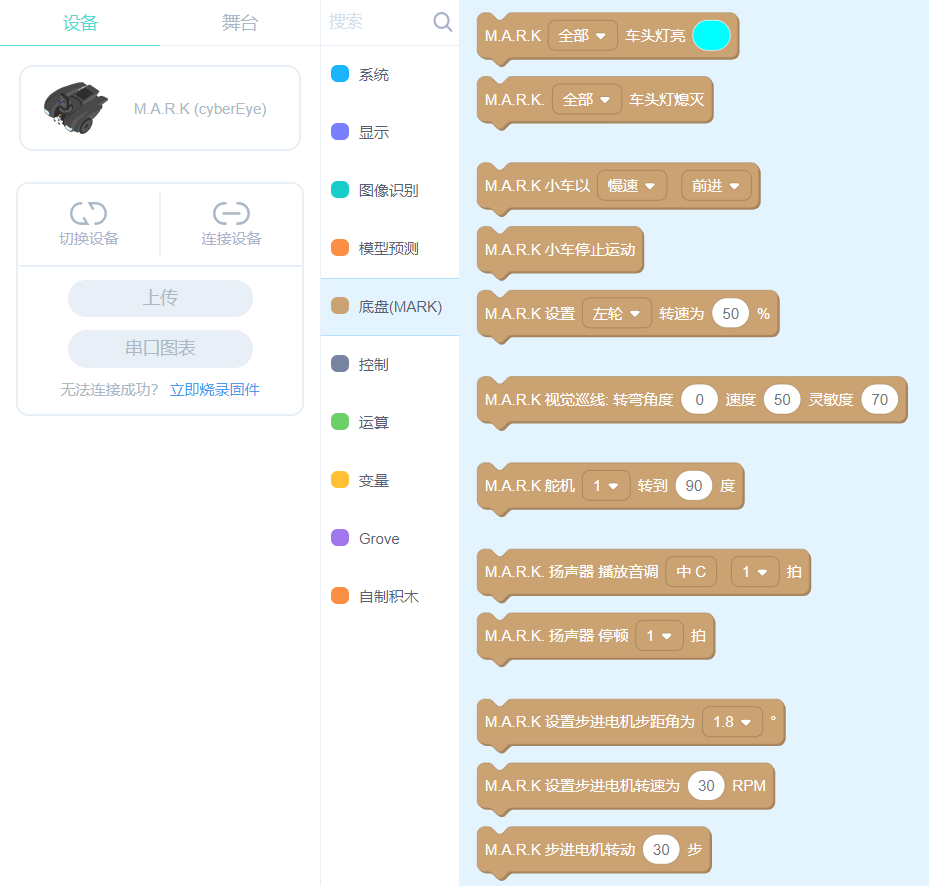
M.A.R.K(全部)车头灯亮(青色)

【含义】:控制 M.A.R.K 全部、左侧或右侧车头灯的颜色
【类型】:执行类
【示例 1】:车头灯闪烁
M.A.R.K 车头灯按 1Hz 的频率闪烁。
M.A.R.K(全部)车头灯熄灭
【含义】:熄灭 M.A.R.K 全部、左侧或右侧车头灯
【类型】:执行类
M.A.R.K 小车以(慢速)(前进)

【含义】:控制 M.A.R.K 小车以指定速度(慢速、中速或全速)前进、后退、左转或右转
【类型】:执行类
M.A.R.K 小车停止运动
【含义】:设置 M.A.R.K 的左右轮速度为 0
【类型】:执行类
M.A.R.K 设置(左轮)转速为(50)%

【含义】:单独设置 M.A.R.K 的左轮或右轮的转速,正值为前进,负值为后退
【类型】:执行类
M.A.R.K 视觉巡线: 转弯角度( )速度(50) 灵敏度(60)

【含义】:控制 M.A.R.K 进行视觉巡线
【类型】:执行类
【转弯角度】:需要放入“图像识别”区的“转弯角度”积木块
【速度】:范围为[0,100],数值越大,巡线速度越快
【灵敏度】:范围为[40,70]
【提示】:需要搭配“图像识别”区的“转弯角度”积木块使用
M.A.R.K 舵机(1)转到(90)度

【含义】:设置 M.A.R.K 上连接至servo 接口 S1 ~ S4 的舵机角度
【类型】:执行类
【角度范围】:[0,180]
M.A.R.K 扬声器 播放音调(中C)(1)拍

【含义】:控制 M.A.R.K 上连接至D3口的扬声器播放指定的音调,音调持续指定的节拍时间
【类型】:执行类
M.A.R.K 扬声器 停顿(1)拍

【含义】:M.A.R.K小车扬声器 停顿指定的节拍时间
【类型】:执行类

若有收获,就点个赞吧
0 人点赞
