当巡线传感器巡线效果不佳时,你可尝试按照以下步骤矫正巡线传感器。
a. 将巡线传感器接至 M.A.R.Kduino 扩展板上的任意一个5V 数字Grove接口上电

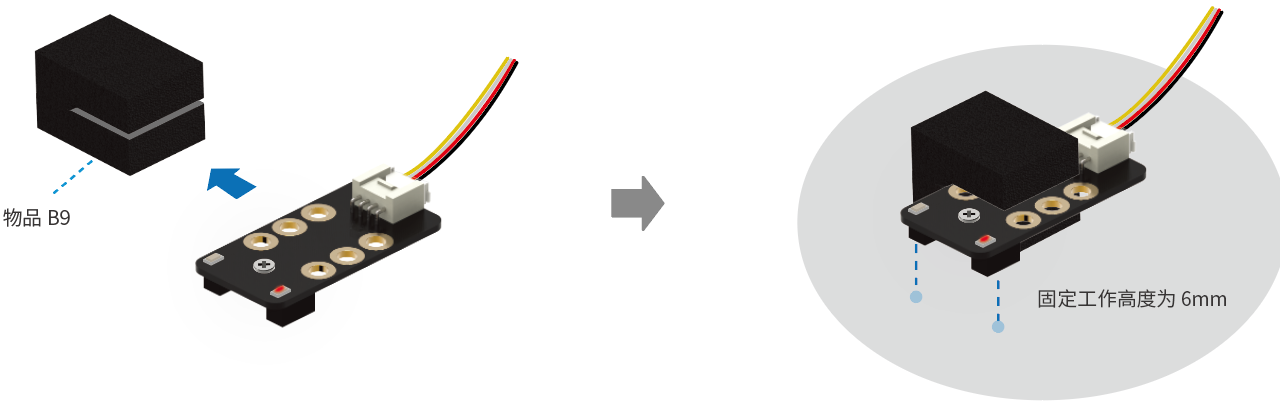
b. 将巡线传感器插进巡线模块支架 (物品B9) 的中间缝隙内以固定其工作高度
c. 校正
将传感器 1 放置在白底上,同时,传感器 2 位于黑线上,然后用平头螺丝刀朝一个方向 (如顺时针方向) 缓慢旋转灵敏度调节器,直到位于白底上方的传感器1 指示灯被点亮,此时,黑线上的传感器2 指示灯为熄灭状态。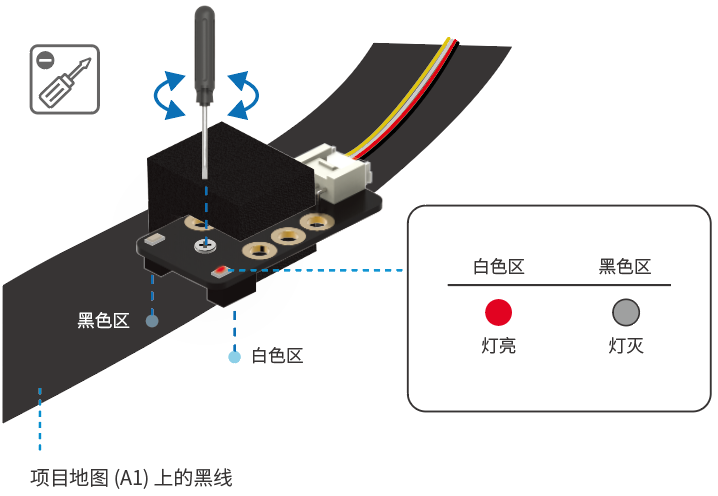
d. 白色区验证
当矫正完成后,将两个传感器都置于白底上方,此时两个传感器的灯应处于点亮状态。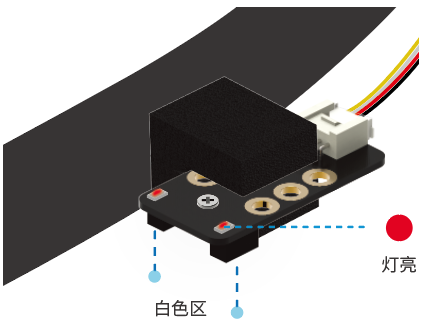
e. 黑色区验证
然后再置于黑线上方,此时两个传感器的灯应处于熄灭状态。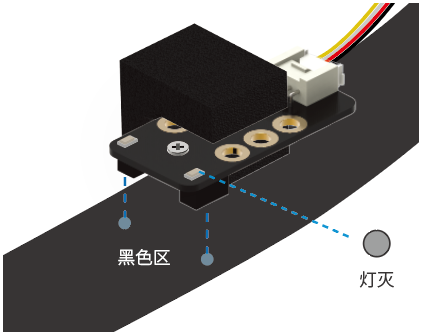

若有收获,就点个赞吧
0 人点赞
