基础知识

对当前小车状态进行评估,p代表位置,u代表速度
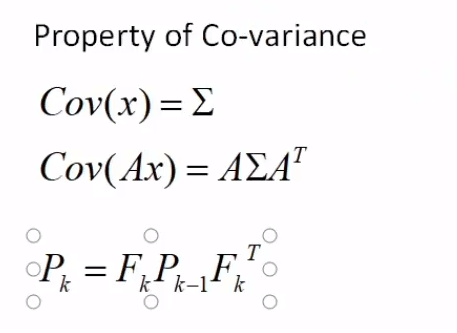
期望值 协方差

当小车匀速运动(a=0 速度不发生变化)时,已知k-1时刻的位置p、速度V,计算k时刻的**位置p、速度V。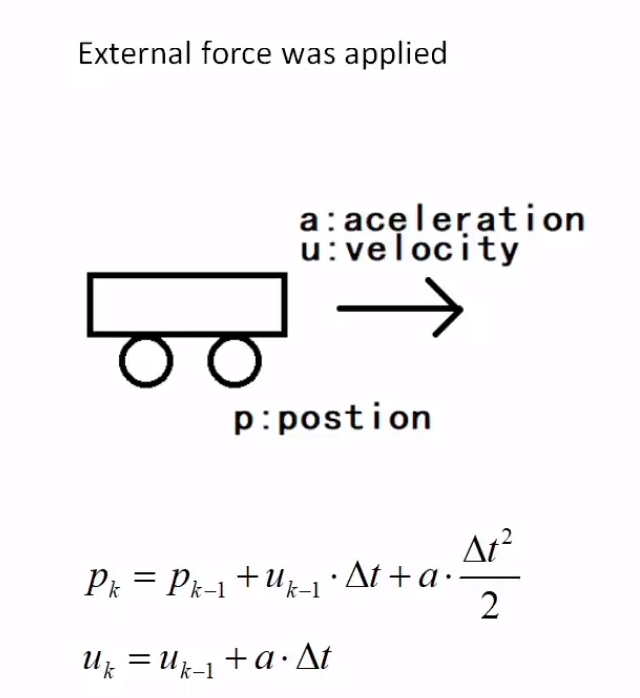
当小车收到外力作用,p、u值根据加速度公式计算**
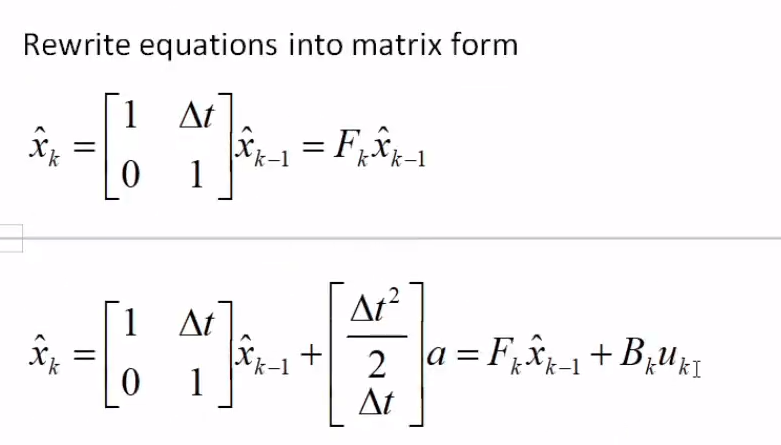
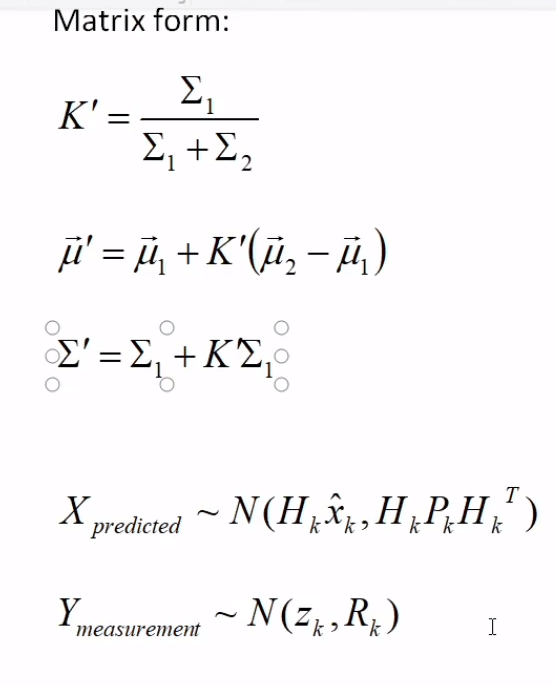
用矩阵形式表示
噪声

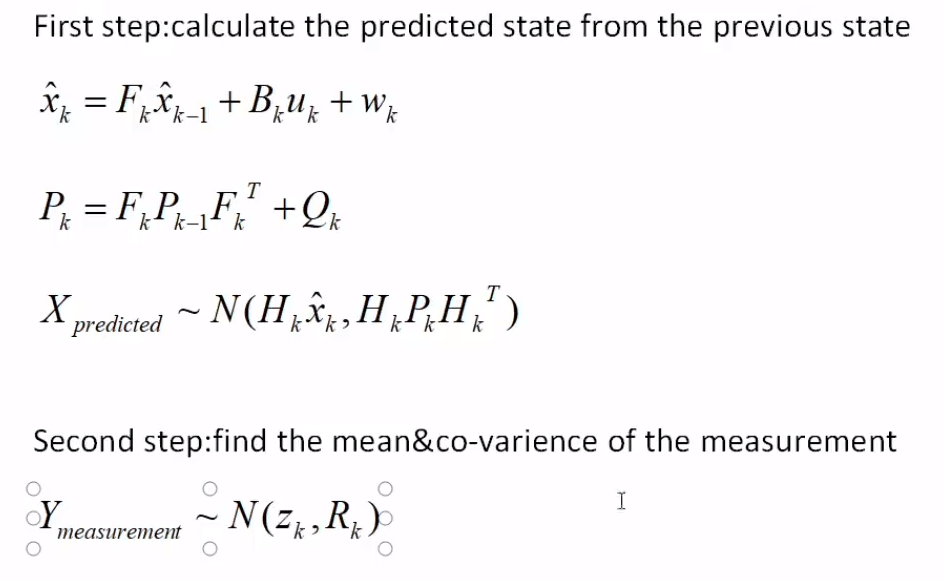
W 为预估噪声 Q为观测噪声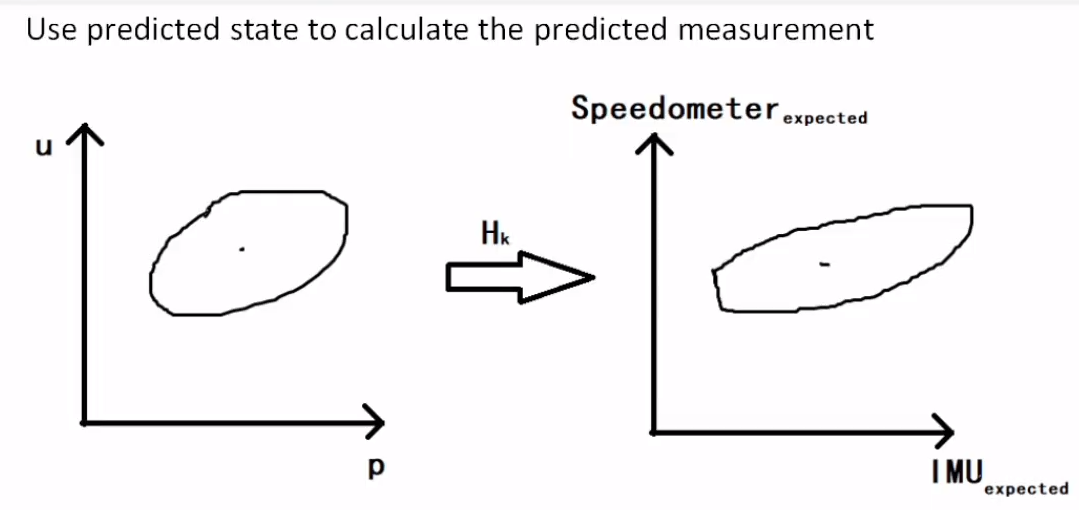
H需要标定,用传感器去测量一个已知的运动过程,就能得到这个数。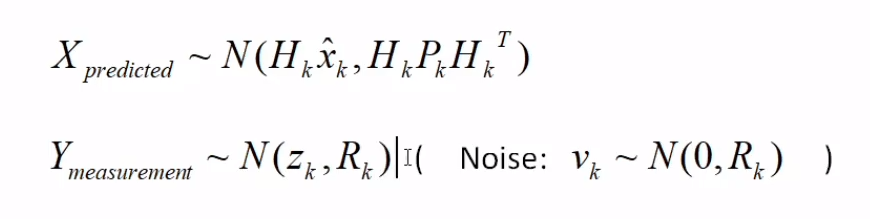
预测的变量分布X(预测观测值)和测量出的变量分布Y(真实观测值)。
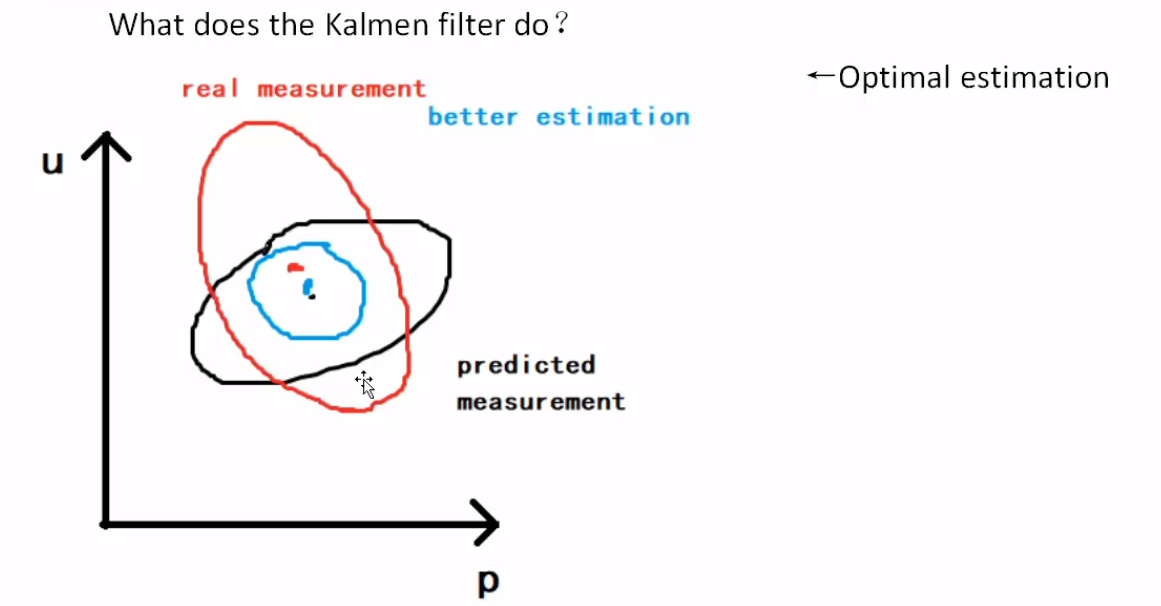
卡尔曼滤波如何工作
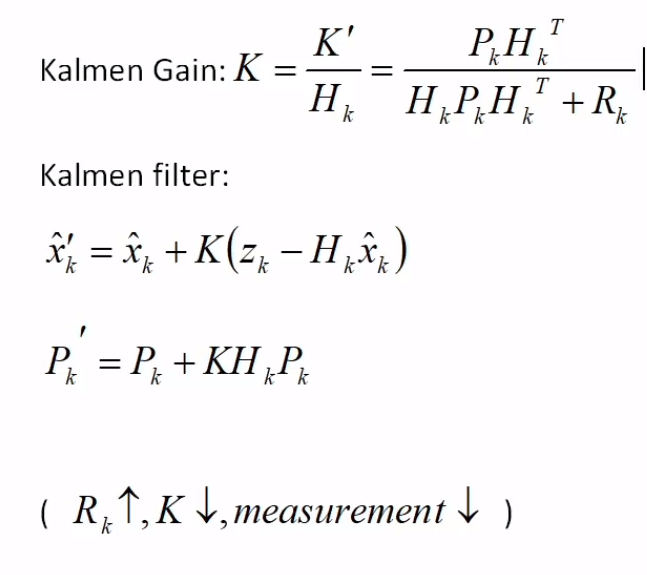
计算公式推导


程序怎么写


若有收获,就点个赞吧
0 人点赞
