1.调度概念
任务很多,资源有限,没法做到同时处理,这时候就需要确定某种规则来决定处理任务的顺序,这就是处理机调度要研究的问题。在多到程序系统中,进程数大于CPU个数,此时处理机要按照一定的算法选择一个进程并将处理器分配给它 运行。
2.调度算法
2.1 先到先服务(FCFS,队列实现,非抢占)

2.2 短作业优先(SJF,最短作业优先调度算法)
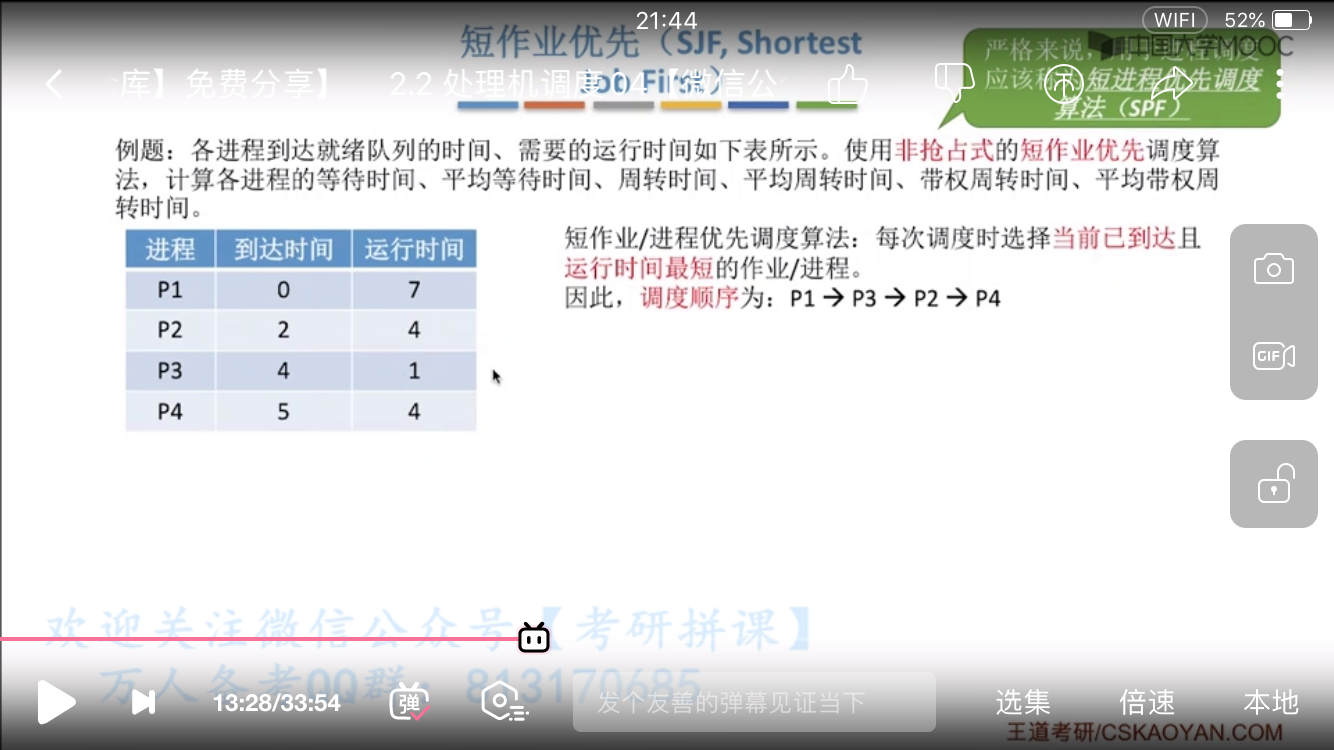
短作业/进程优先调度算法
每次调度时选择当前已到达且运行时间最短的作业/进程。
当第0秒时,P1到达,就开始运行P1。当第7秒时,P1执行完毕,此时P2,P3,P4都已经到达,选择最短作业就是P3,开始执行当第8秒时,P3执行完毕,此时P2,P4处于就绪状态,并且他们两个作业时间相同,按照到达顺序进行执行,执行P2当第12秒时,P2执行完毕,P4处于就绪状态,开始执行P4当第16秒时,P4执行完毕。
最短剩余时间优先算法
最短剩余时间优先算法: 每当有进程加入就绪队列时就要重新调整调度,如果新到达的进程剩余时间比当前运行的进程剩余时间更短,则由新进程抢占处理机,当前进行进程重新回到就绪队列,此外,当一个进程完成时也需要重新调整调度方案。
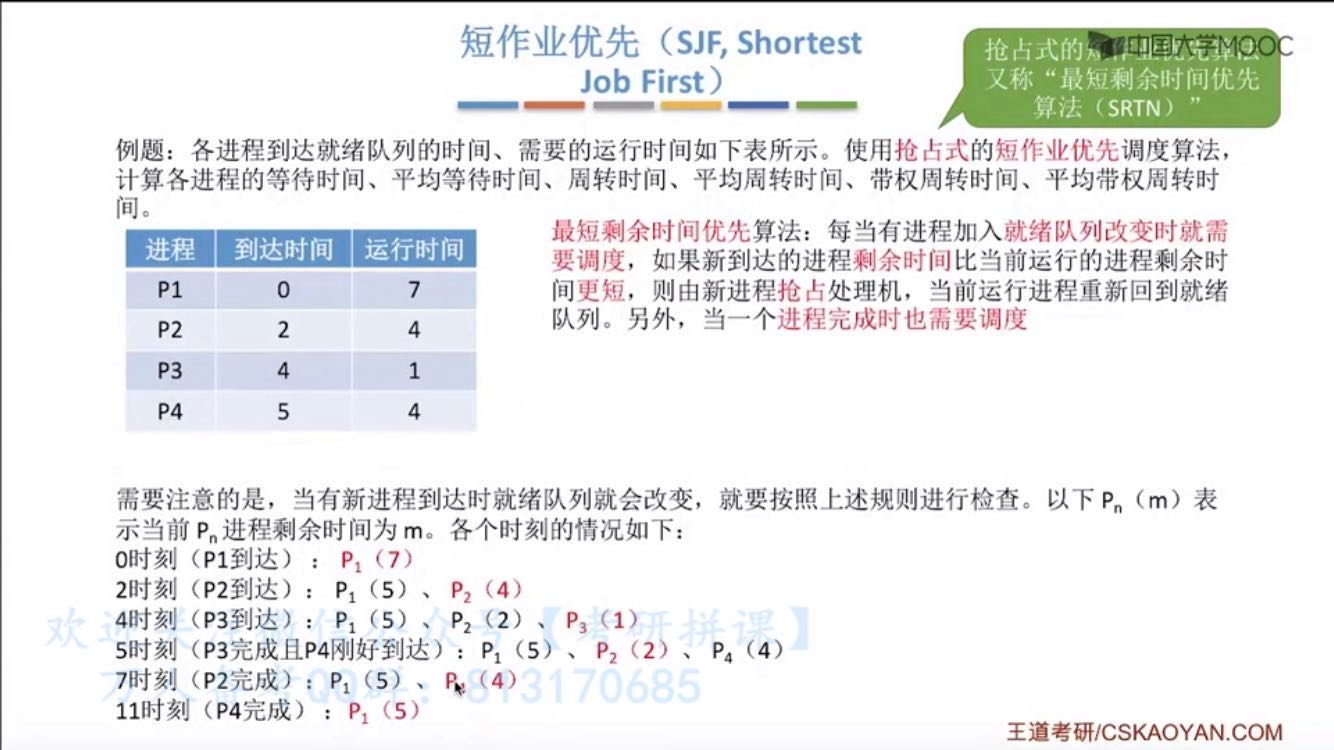
如上图这个例子,四个进程执行完毕,一共花的时间是 7+4+1+4=16, 但是根据短作业优先,在11时刻时就有三个进程完成作业,对短作业友好,无需因存在长作业而要等待很长时间。
第0秒时,P1到达,开始执行第2秒时,P2到达,此时P1剩余作业时间5秒,P2剩余时间4秒,开始执行P2,P1暂停,进入到就绪状态。第4秒时,P3到达,此时P1剩余作业时间5秒,P3剩余作业时间1秒,P2剩余作业时间2秒,开始执行P3第5秒时,P4到达,P3执行完毕,此时P1剩余作业时间5秒,P4剩余作业时间4秒,P2剩余作业时间2秒,开始执行P2第7秒时,P2执行完毕,此时P1剩余作业时间5秒,P4剩余作业时间4秒,开始执行P4第11秒时,P4执行完毕,开始执行P1第16秒时,P1执行完毕。

2.3 高响应比优先(HRRN)
高响应比优先算法
非抢占式的调度算法,只有当前运行的进程主动放弃CPU时(正常/异常完成,或者主动阻塞),才需要进行调度,调度时计算所有就绪进程的响应比,选响应比最高的进程处理。响应比=(等待时间+要求服务时间)/(要求服务时间)
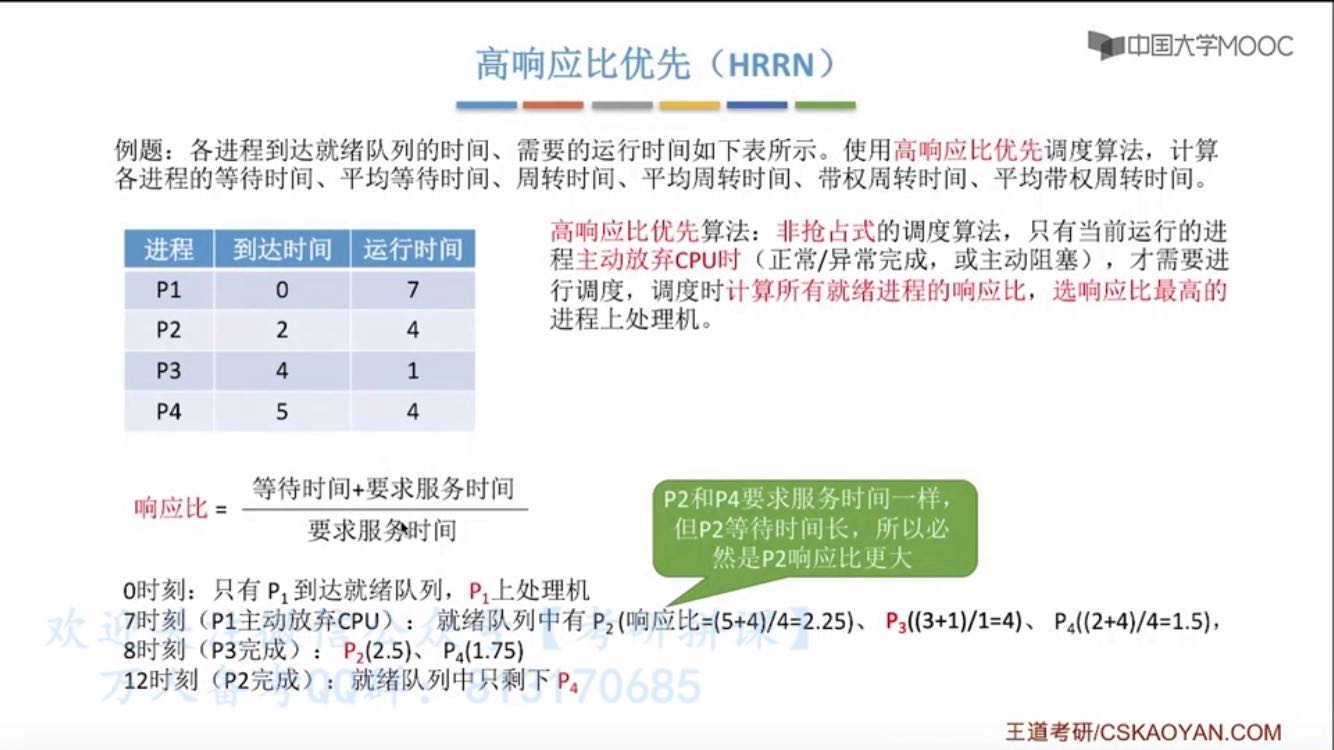
第0秒,P1到达就绪队列,P1上处理器开始处理。第7秒,P1执行完毕,主动放弃CPU,此时在就绪队列上,有P2(等待时间5秒,要求服务时间4秒),P2(响应比=(5+4)/4=2.25)有P3(等待时间3秒,要求服务时间1秒),P3(响应比=(3+1)/1=4)有P4(等待时间2秒,要求服务时间4秒),P4(响应比=(2+4)/4=1.5)优先处理P3第8秒,P3执行完毕,主动放弃CPU,此时在就绪队列上,有P2(等待时间6秒,要求服务时间4秒),P2(响应比=(6+4)/4=2.5)有P4(等待时间3秒,要求服务时间4秒),P3(响应比=(3+4)/4=1.75)优先处理P2第12秒,P2执行完毕,主动放弃CPU,开始处理P4

优缺点
综合考虑了等待时间和运行时间(要求服务时间),等待时间相同时,要求服务时间短的优先(SJF的优点,短作业优先)要求服务时间相同时,等待时间长的优先(FCFS的优点,先到先服务)对于长作业来说,随着等待时间越来越久,其响应比也会越来越大,从而避免了长作业饥饿的问题。
2.4 时间片轮转调度算法(RR,Round-Robin)
时间片轮转调度算法: 轮流让就绪队列中的进程依次执行一个时间片(每次选择的都是排在就绪队列头的进程)
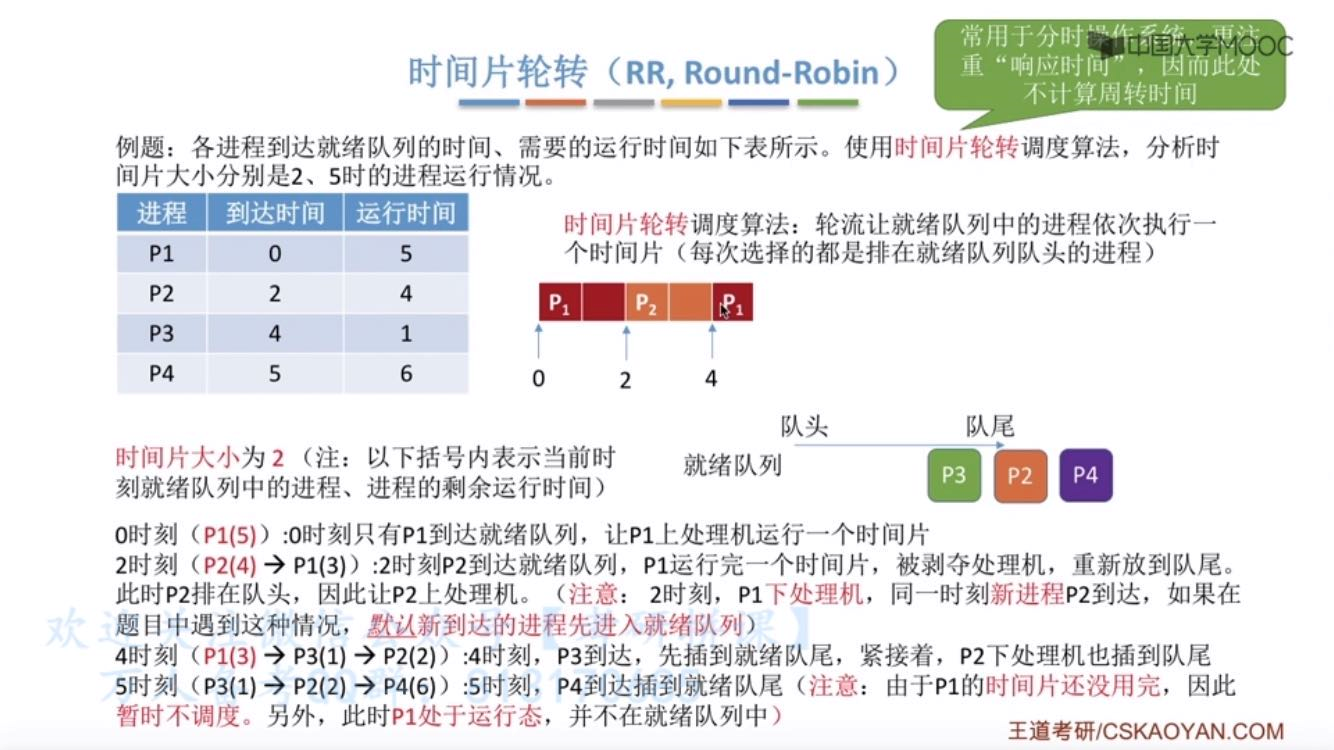
假设时间片单位大小为2,以上图为例第0秒: 只有P1到达就绪队列,让P1上处理机运行一个时间片。(P1[5])第2秒: P2到达就绪队列,P1运行完一个时间片,被剥夺处理机,重新放到队尾(P2[4],P1[3])此时P2排在对头,因此让P2上处理机(注意:第2秒时,P1运行完一个时间片,下处理及,同一时刻新进程P2到达,默认新到达的进行先进入就绪队列)(P2[4],P1[3])第4秒: P3到达,先插入到就绪队尾,紧接着,P2下处理机也插入到对尾。开始执行P1 (P1[3],P3[1],P2[2])第5秒: P4到达,插入就绪队列队尾,由于P1的时间片还没用完,因此暂时不调度。P1处于运行态,并不在就绪队列中。(P1[2],P3[1],P2[2],P4[6])第6秒: P1运行完一个时间片,剥离处理机,重新放到队尾。此时开始处理P3 (P3[1],P2[2],P4[6],P1[1])第7秒: P3运行完毕,主动放弃处理机。发生调度。开始执行P2(P2[2],P4[6],P1[1])第9秒: P2运行完毕,主动放弃处理机,发生调度。开始执行P4(P4[6],P1[1])第11秒: P4运行完一个时间片,剥离处理机,重新放到队尾。开始执行P1(P1[1],P4[4])第12秒: P1运行完毕,主动放弃处理机,发生调度。此时就绪队列中只剩下P4,P4上处理机(P4[4])第14秒: 就绪队列为空,因此让P4接着运行一个时间片第16秒:所有进程运行结束。
时间片大小的讨论
[1] 如果时间片太大,使得每个进程都可以在一个时间片内完成,那么轮转调度算法其实就变成了 先来先服务调度算法,并且会增大进程响应时间。因此时间片不能太大。[2] 如果时间片太小,进程调度,切换是有时间代价的,会导致进程切换过于频繁,系统会花大量的时间来处理进程切换,从而导致实际用于进程执行的时间比例减少。
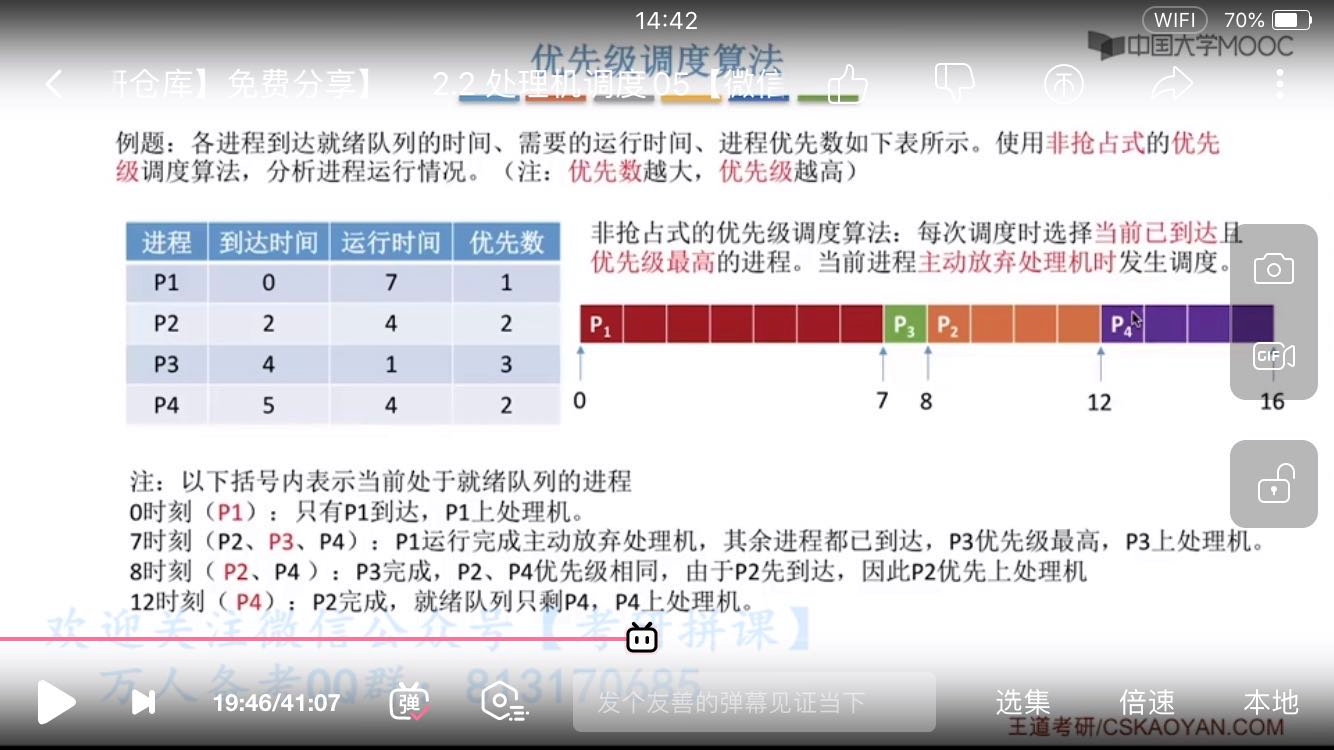
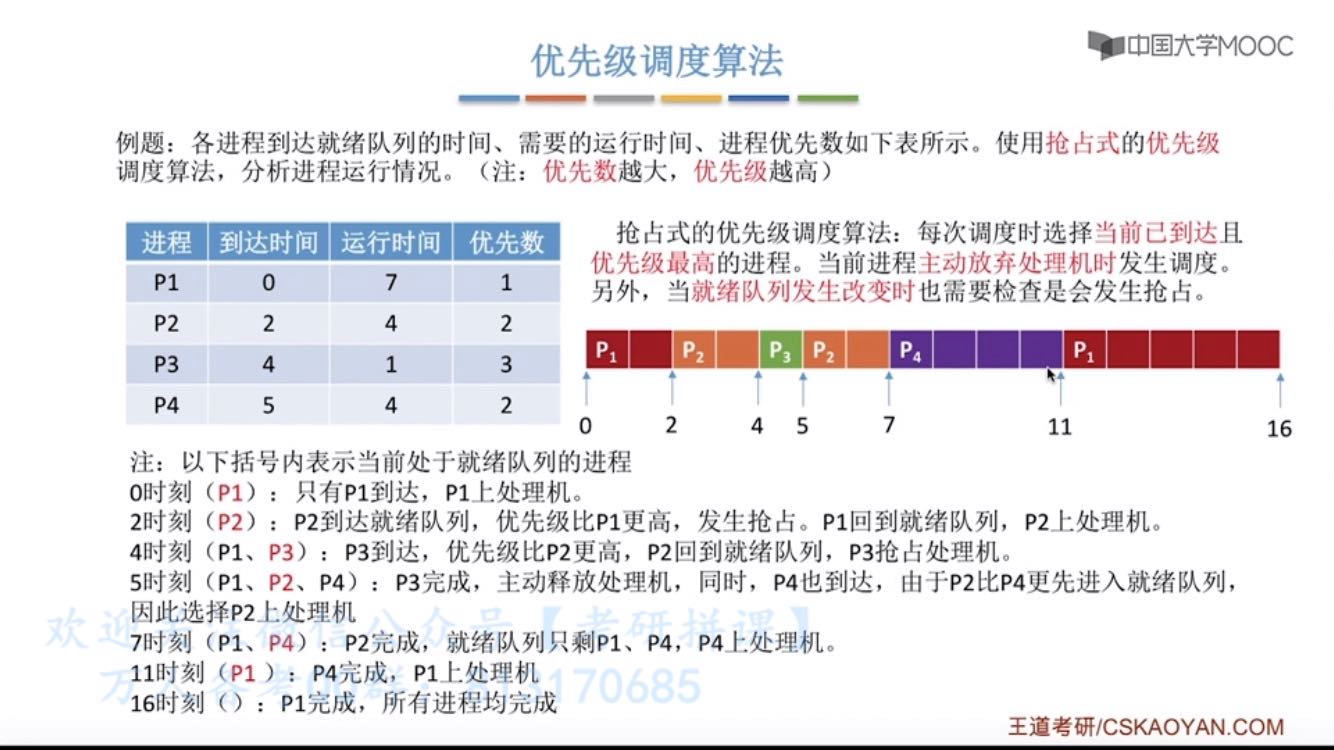
2.5 优先级调度算法
分类
非抢占式优先级调度算法
抢占式优先级调度算法
优缺点
优点:
用优先级区分紧急程度,重要程度。适用于实时操作系统,可灵活地调整对各种作业/进程的偏好程度。
缺点
若源源不断地有高优先级进程到来,则可能导致饥饿现象。
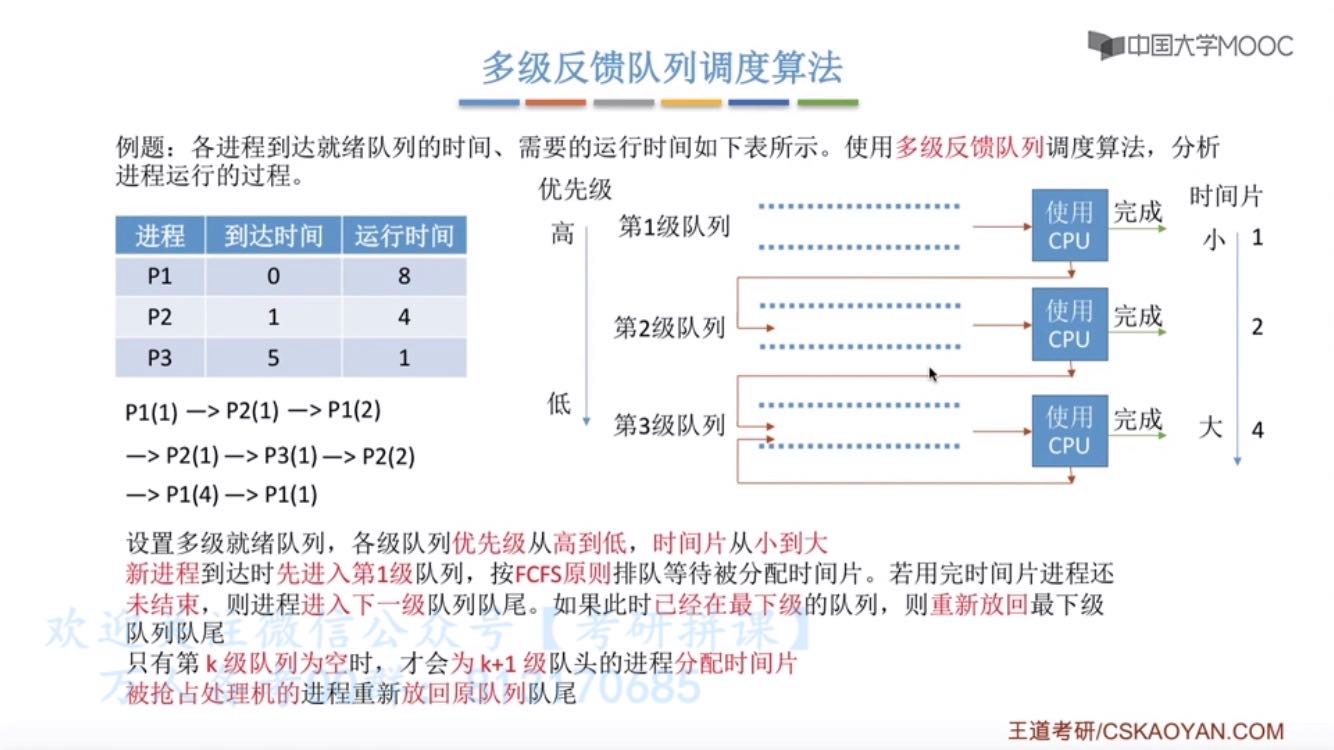
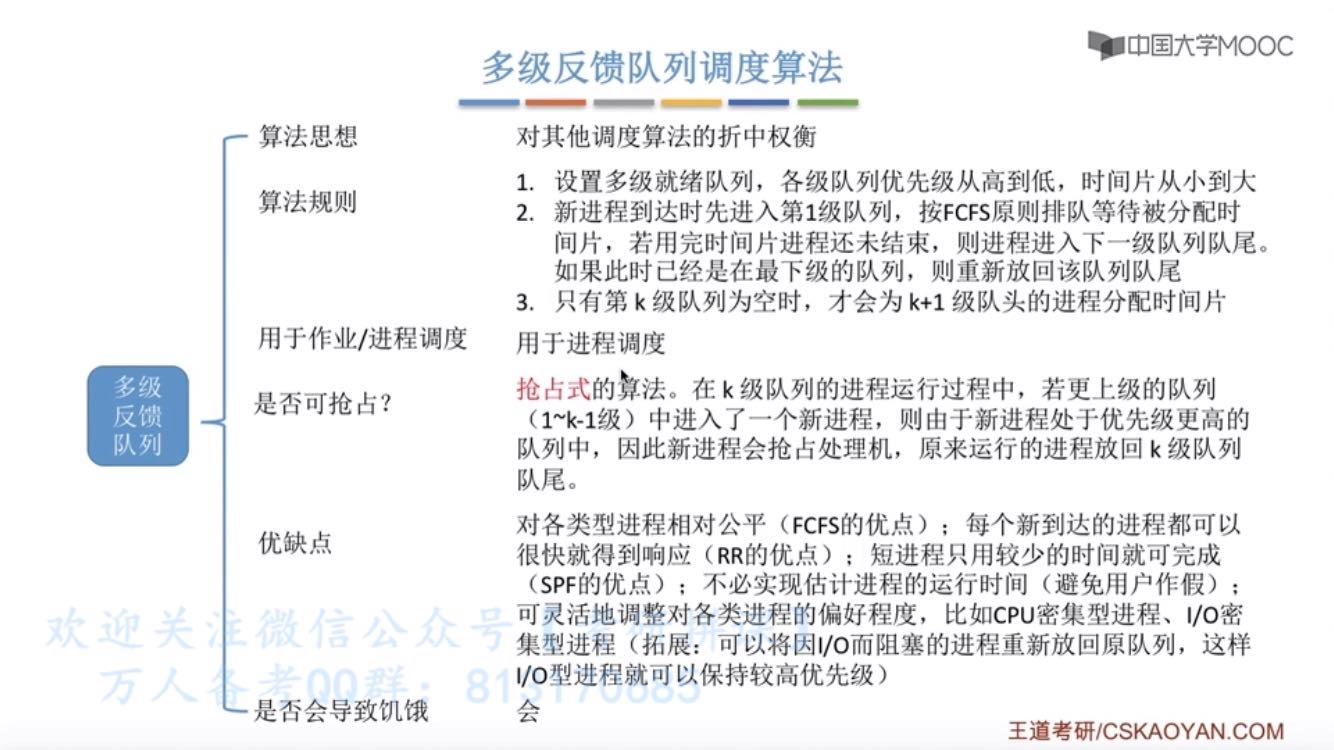
2.6 多级反馈队列调度算法
引用

若有收获,就点个赞吧
0 人点赞
