和递归相反,递归是由大的规模,逐渐划归为小问题,而动态规划同样有这样一个递推式子,但是从小的规模开始,一路生成数据规模越来越大的表,通过表格(空间复杂度)的查表操作,降低了递归空间的重复计算造成的时间浪费。
初探
- 递推
当一维状态不能很好的满足递归关系,可以用二维状态进行递归: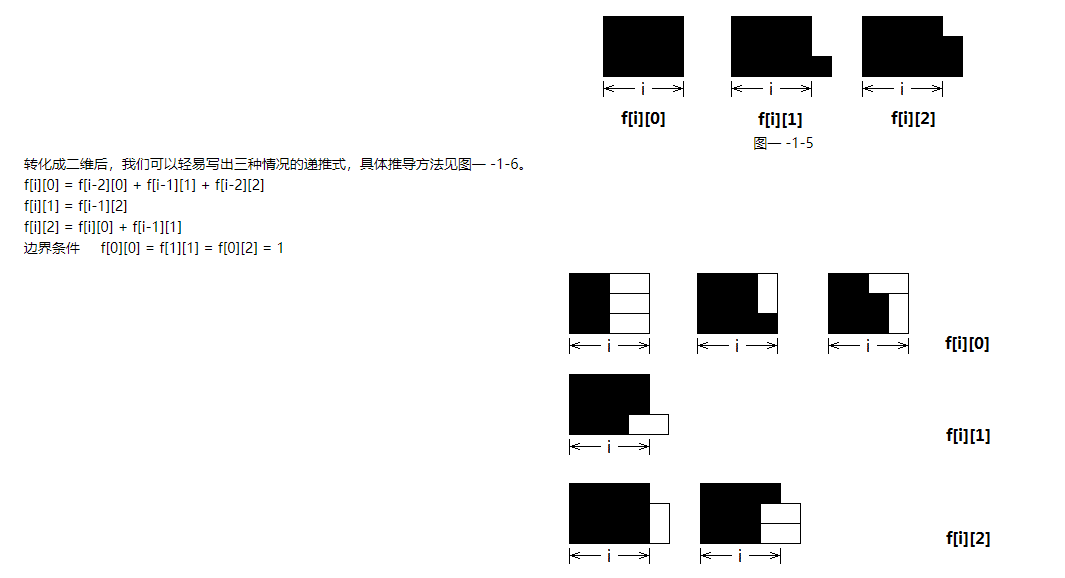
- 记忆化搜索
查表求值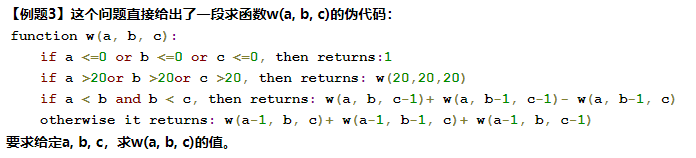
如果使用递归,写一个func,会得到一个指数级时间的方法。使用查表,时间复杂度为立方级。
- 状态和状态转移
状态为解决一个问题的中间结果。当使用动规解决问题,设计合理的状态是解决问题的关键,他会让状态递归方程大大简化(考虑之前的一维变二维)。
- 最优子结构和最优化原理
举例: 最长单调递增子序列
- 决策和无后效性
一个状态演变到另一个状态,往往是通过“决策”来进行的。有了“决策”,就会有状态转移。而无后效性,就是一旦某个状态确定后,它之前的状态无法对它之后的状态产生“效应”(影响),马尔科夫性质。
泊松特性,一旦我等到了车,那么之前无论我等多久,都对下一次来车没有任何影响。
经典模型
1. 线性模型
线性模型的是动态规划中最常用的模型,上文讲到的最长单调子序列就是经典的线性模型,这里的线性指的是状态的排布是呈线性的。
【例题6】在一个夜黑风高的晚上,有n(n <= 50)个小朋友在桥的这边,现在他们需要过桥,但是由于桥很窄,每次只允许不大于两人通过,他们只有一个手电筒,所以每次过桥的两个人需要把手电筒带回来,i号小朋友过桥的时间为T[i],两个人过桥的总时间为二者中时间长者。问所有小朋友过桥的总时间最短是多少。
解答:
每次过桥的时候最多两个人,如果桥这边还有人,那么还得回来一个人(送手电筒),也就是说N个人过桥的次数为2N-3(倒推,当桥这边只剩两个人时只需要一次,三个人的情况为来回一次后加上两个人的情况…)。有一个人需要来回跑,将手电筒送回来(也许不是同一个人,realy?!)这个回来的时间是没办法省去的,并且回来的次数也是确定的,为N-2,如果是我,我会选择让跑的最快的人来干这件事情,但是我错了…如果总是跑得最快的人跑回来的话,那么他在每次别人过桥的时候一定得跟过去,于是就变成就是很简单的问题了,花费的总时间:
T = minPTime (N-2) + (totalSum-minPTime)
来看一组数据 四个人过桥花费的时间分别为 1 2 5 10,按照上面的公式答案是19,但是实际答案应该是17。
具体步骤是这样的:
第一步:1和2过去,花费时间2,然后1回来(花费时间1);
第二歩:3和4过去,花费时间10,然后2回来(花费时间2);
第三部:1和2过去,花费时间2,总耗时17。
所以之前的贪心想法是不对的。
我们先将所有人按花费时间递增进行排序,假设前i个人过河花费的最少时间为opt[i],那么考虑前i-1个人过河的情况,即河这边还有1个人,河那边有i-1个人,并且这时候手电筒肯定在对岸,所以
opt[i] = opt[i-1] + a[1] + a[i] (让花费时间最少的人把手电筒送过来,然后和第i个人一起过河)
如果河这边还有两个人,一个是第i号,另外一个无所谓,河那边有i-2个人,并且手电筒肯定在对岸,所以
opt[i] = opt[i-2] + a[1] + a[i] + 2a[2] (让花费时间最少的人把电筒送过来,然后第i个人和另外一个人一起过河,由于花费时间最少的人在这边,所以下一次送手电筒过来的一定是花费次少的,送过来后花费最少的和花费次少的一起过河,解决问题)
所以 opt[i] = min{opt[i-1] + a[1] + a[i] , opt[i-2] + a[1] + a[i] + 2a[2] }
2. 区间模型
区间模型的状态表示一般为d[i][j],表示区间[i, j]上的最优解,然后通过状态转移计算出[i+1, j]或者[i, j+1]上的最优解,逐步扩大区间的范围,最终求得[1, len]的最优解。
【例题7】给定一个长度为n(n <= 1000)的字符串A,求插入最少多少个字符使得它变成一个回文串。**
典型的区间模型,回文串拥有很明显的子结构特征,即当字符串X是一个回文串时,在X两边各添加一个字符’a’后,aXa仍然是一个回文串,我们用d[i][j]来表示A[i…j]这个子串变成回文串所需要添加的最少的字符数,那么对于A[i] == A[j]的情况,很明显有 d[i][j] = d[i+1][j-1] (这里需要明确一点,当i+1 > j-1时也是有意义的,它代表的是空串,空串也是一个回文串,所以这种情况下d[i+1][j-1] = 0);当A[i] != A[j]时,我们将它变成更小的子问题求解,我们有两种决策:
1、在A[j]后面添加一个字符A[i];
2、在A[i]前面添加一个字符A[j];
根据两种决策列出状态转移方程为:
d[i][j] = min{ d[i+1][j], d[i][j-1] } + 1; (每次状态转移,区间长度增加1)
空间复杂度O(n,时间复杂度O(n), 下文会提到将空间复杂度降为O(n)的优化算法。
3. 背包
1. 01背包
题目:有N件物品和一个容量为V的背包。第i件物品的费用是c[i],价值是w[i]。求解将哪些物品装入背包可使价值总和最大。
状态转移方程:
f[i][v]=max{f[i-1][v],f[i-1][v-c[i]]+w[i]}
基础解答:
for i=1..Nfor v=V..0f[v]=max{f[v],f[v-c[i]]+w[i]};
一维:
// 过程ZeroOnePack,表示处理一件01背包中的物品,两个参数cost、weight分别表明这件物品的费用和价值procedure ZeroOnePack(cost,weight)// 费用为cost的物品不会影响状态f[0..cost-1]// 倒序遍历 保证在新的一轮(i+1)时 f[v]中v大的值不会v小的值的影响,如f[10]=max{f[10-5]+10,f[10]},// 此时f[5]还没有受到污染,即f[i][5]for v=V..costf[v]=max{f[v],f[v-cost]+weight}for i=1..NZeroOnePack(c[i],w[i]);
恰好装满:在初始化时除了f[0]为0其它f[1..V]均设为-∞,如果不是刚好装满会得到f[4]=f[3]+f[1]=-∞
2. 完全背包
题目:有N种物品和一个容量为V的背包,每种物品都有无限件可用。第i种物品的费用是c[i],价值是w[i]。求解将哪些物品装入背包可使这些物品的费用总和不超过背包容量,且价值总和最大。
状态转移方程:
f[i][v]=max{f[i-1][v-k*c[i]]+k*w[i]|0<=k*c[i]<=v}
基础解答:
for i=1..Nfor v=0..Vf[v]=max{f[v],f[v-cost]+weight}
一维:
procedure CompletePack(cost,weight)// 正序 和01相反,需要前面的收到污染 f[10]={f[10-4]+40,f[10]},f[6]={f[6-4]+40,f[10]}此时引入// 了重量为4的物品,可以选择用2次for v=cost..Vf[v]=max{f[v],f[v-c[i]]+w[i]}for i=1..Nprocedure(c[i],w[i]);
3. 多重背包
题目:有N种物品和一个容量为V的背包。第i种物品最多有n[i]件可用,每件费用是c[i],价值是w[i]。求解将哪些物品装入背包可使这些物品的费用总和不超过背包容量,且价值总和最大。
状态转移方程:
f[i][v]=max{f[i-1][v-k*c[i]]+k*w[i]|0<=k<=n[i]}
一维:
procedure MultiplePack(cost,weight,amount)if cost*amount>=VCompletePack(cost,weight)returninteger k=1// n[i]=13 k=1,2,4, amount=6while k<amountZeroOnePack(k*cost,k*weight)amount=amount-kk=k*2ZeroOnePack(amount*cost,amount*weight)for i=1..Nprocedure(c[i],w[i],n[i]);

若有收获,就点个赞吧
0 人点赞
