陀螺仪gyro 对应角速度
一般定义载体的右、前、上三个方向构成右手系,绕向前的轴旋转就是横滚角,绕向右的轴旋转就是俯仰角,绕向上的轴旋转就是航向角
横滚 roll:绕x轴旋转
俯仰 pitch:绕y轴旋转
航向 yaw:绕z轴旋转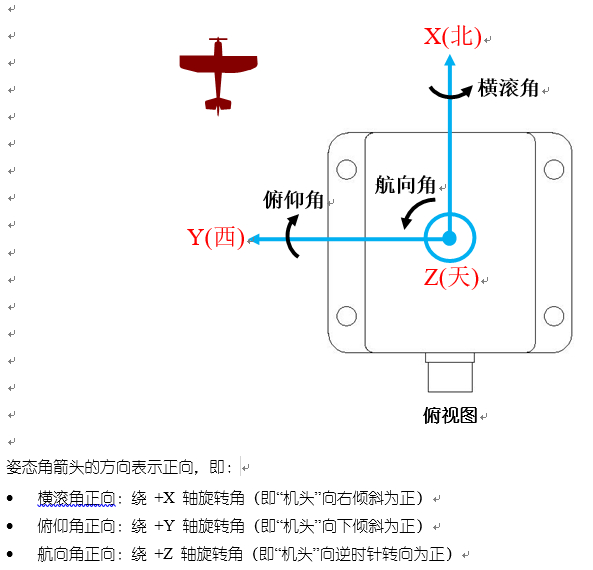
=========================================================
www.atom-robotics.com
roll/pitch 翻滚/俯仰 静态精度:0.2度
yaw 偏航/航向静态精度:1.0度
姿态 & 航向参数
横滚/俯仰静态精度 <0.2° RMS
航向角静态精度 <1.0° RMS
横滚/俯仰动态精度 <0.5° RMS
航向角动态精度 <1.0° RMS
IMU数据更新速率 0-1000 Hz
Boson引擎数据更新速率 0-1000 Hz
姿态角分辨率 0.01°
陀螺仪参数
量程 ±2000°/s
噪声密度 0.004°/s/√Hz
灵敏度
<0.005°/LSB
灵敏度变化 ±0.008%/℃
静止零漂±3dps
静止零漂变化 ±0.015dps/℃
加速度计参数
量程 ±16 g
噪声密度 90μg/√Hz
灵敏度 <0.07mg/LSB
灵敏度变化 ±0.01%/℃
静止零漂 ±41mg
静止零漂变化 ±0.11mg/℃
磁力计参数
量程 ±50 Gauss
RMS噪声 3mGuass
灵敏度 1.4mGuass/LSB
灵敏度变化 ±0.03%/℃
主机接口
主机接口类型 UART, I2C, SPI
软件API Atom 专属协议 Atom SDK开发包
电气特性
输入电压 1.71 to 3.6V
电流(1) 20.1mA @ 1.8V 37.5mA @ 1.8V
环境与温度
工作温度 -40°C to +85°C
存储温度 -40°C to +85°C
物理特性
尺寸 12.1 12.1 * 3.3mm 重量 0.63 g 封装 28-pin PLCC

若有收获,就点个赞吧
0 人点赞
