UWB
检索关键词
-
引言-概述
煤矿开采属于高危作业,发生矿井事故具有不确定性。矿用井下人员定位系统能够高效、迅速、精确的对井下被困人员进行定位,实时获取井下被困人员的位置信息,提高救援效率。国内井下人员定位技术经历了红外线技术、无源RFID技术、有源RFID技术、无线传感器网络技术的过程,但仍存在一些问题。本文将UWB测距技术、定位算法、GS二次开发设计相结合,设计矿用井下人员定位系统,用于提升人员以及移动设备的定位精度。
方案
设计总体框架
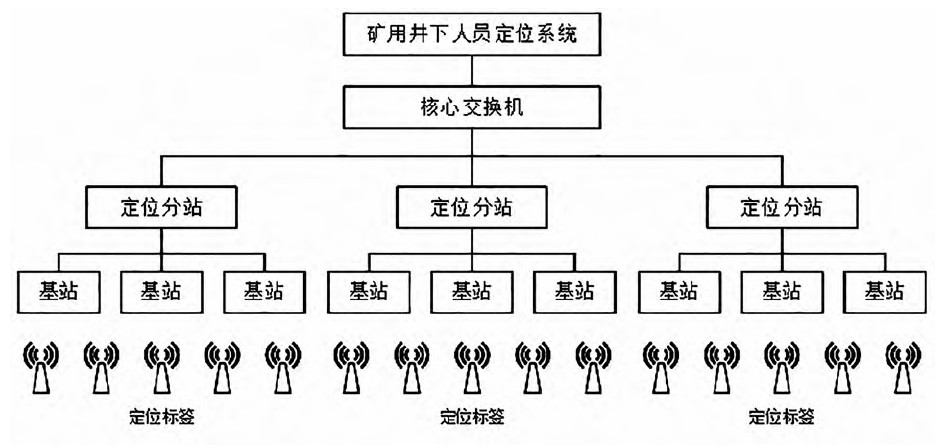
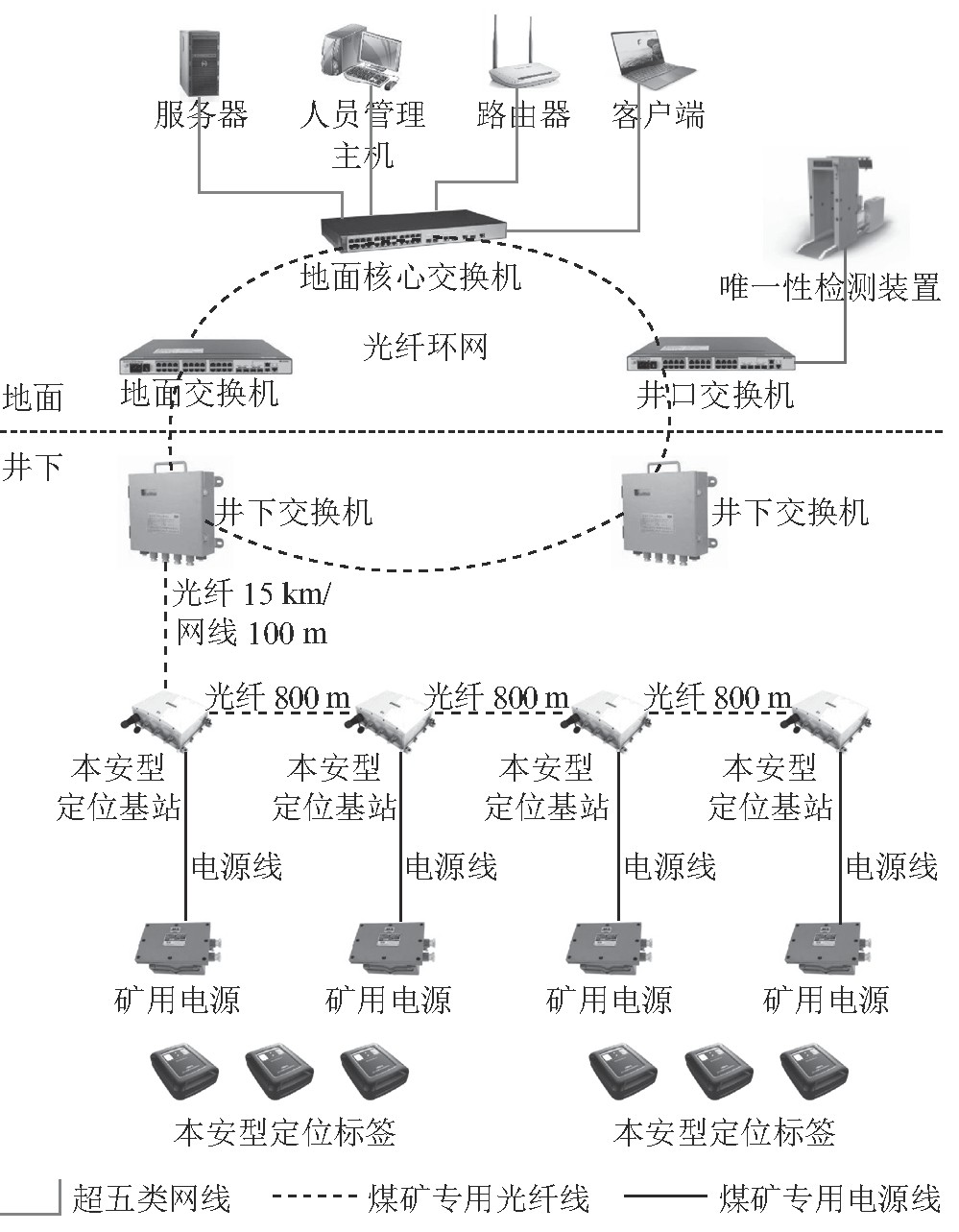
- 矿用井下人员定位系统总体设计框架如图1所示,由定位系统、核心交换机、定位分站、基站以及定位标签组成。定位标签分布于巷道内,基站负责测距并将定位标签与基站之间的距离上传至定位分站。定位分站汇集覆盖区域范围内所有定位标签距离数据后经核心交换机上传至定位系统。定位系统通过定位算法计算定位标签的位置坐标信息,进而实现精准定位。
- 人员定位系统功能介绍
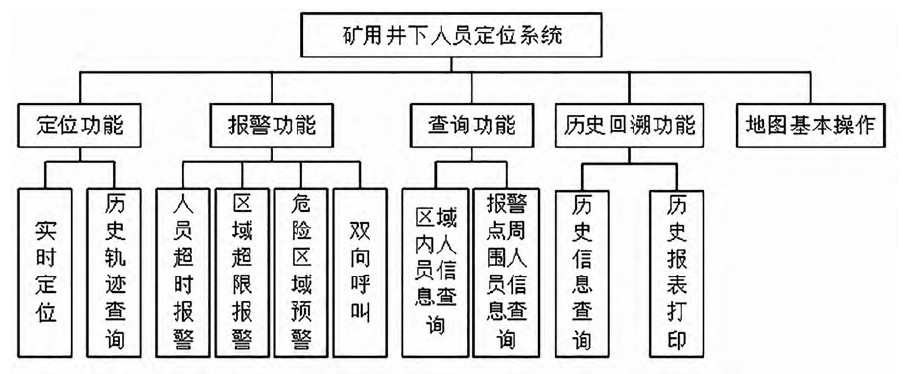
- 矿用井下人员定位系统功能框图
- 矿用井下人员定位系统功能分布框图见图2所示,实现的功能包括五部分:①定位功能:为定位系统的核心功能,能够实时定位井下人员、设备的位置坐标并在G引S中显示;同时兼具历史轨迹查询功能。②报警功能:包括人员超时报警、区域超限报警、危险区域预警以及双向呼叫。双向呼即井下人员可公国定位标签向定位系统发送求救信号。③查询功能:包括区域内人员信息查询和报警点周围人员信息查询两部分。④历史回溯功能:包括历史信息查询和报警打印。⑤G引S基本操作:即选择目标区域后可进行地图放大、缩小、点选、测距等操作。
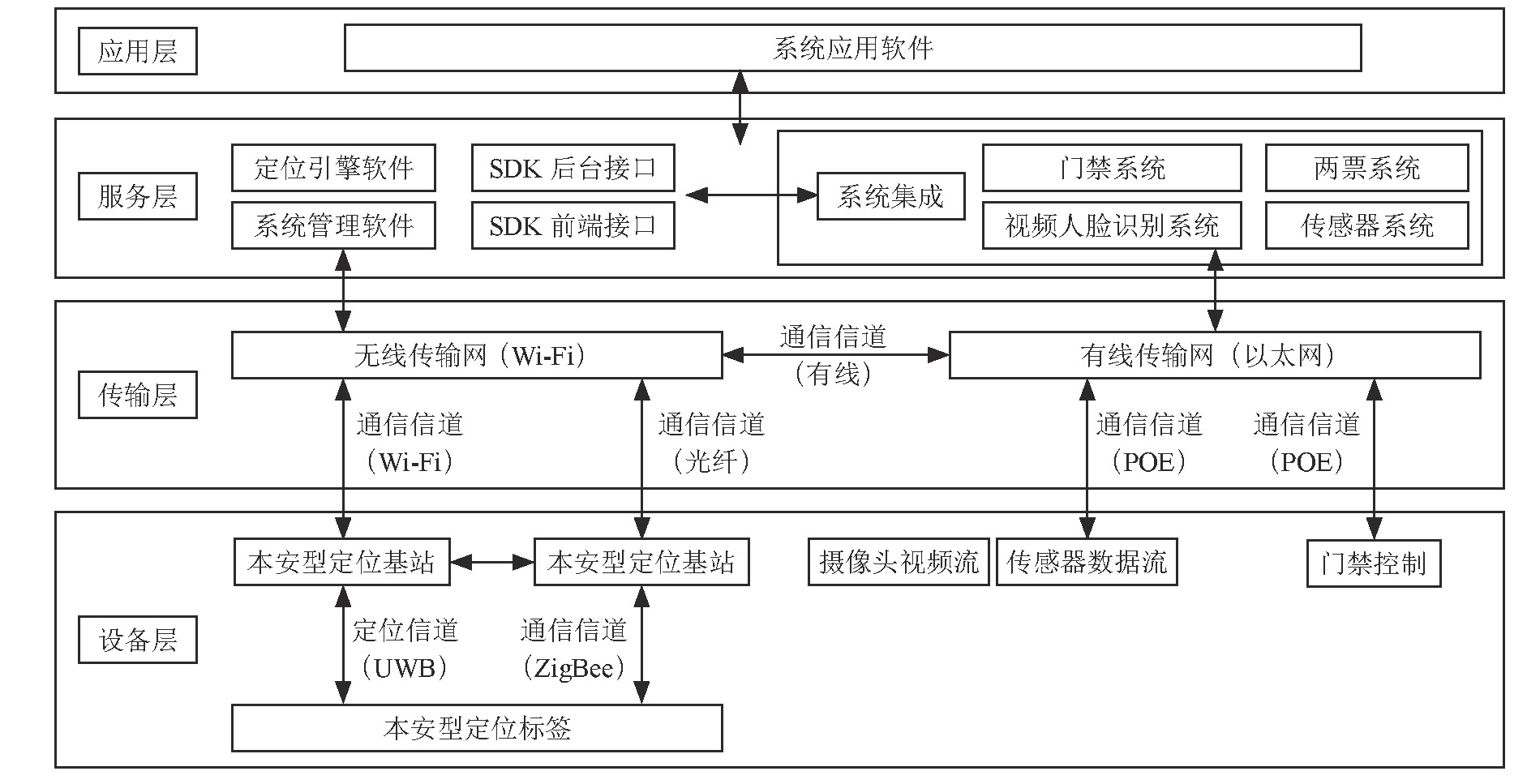
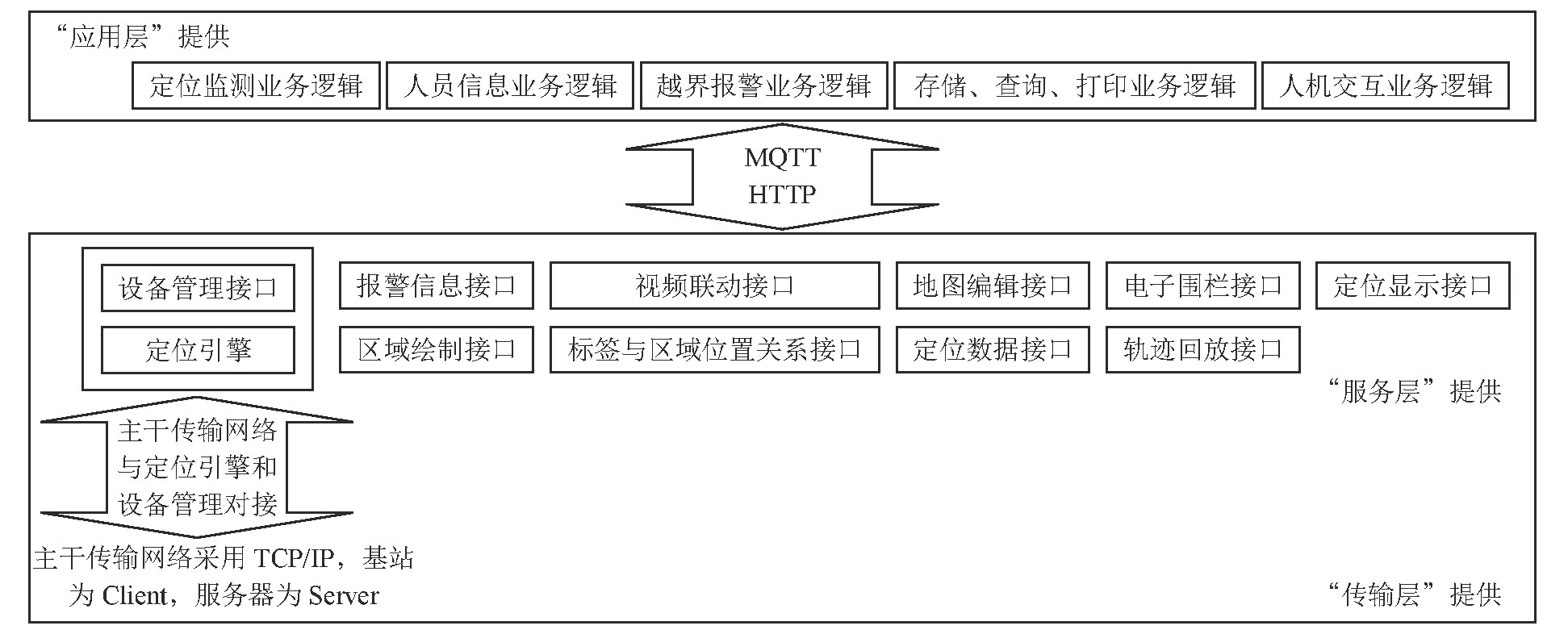
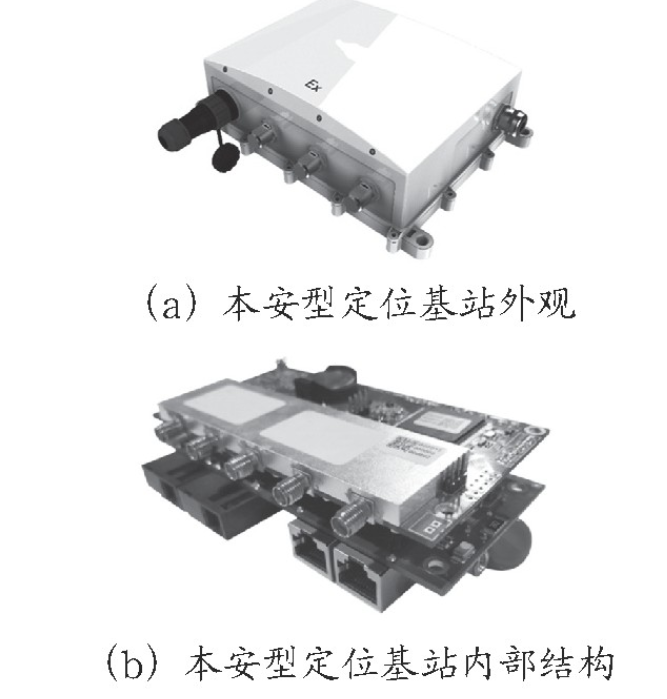
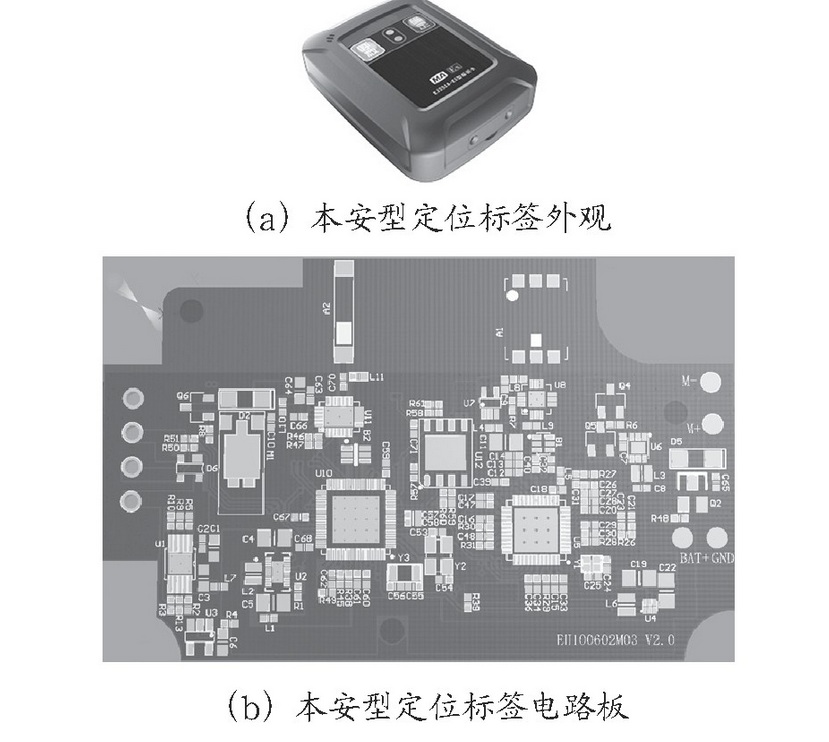
- (1)应用层通过调用服务层提供的SDK接口二次开发形成,对终端煤矿用户提供人员定位系统软件,主要功能包括位置监测显示、人员信息管理、越界报警、存储和查询、人机交互功能等功能。(2)服务层对底层UWB时间信号数据处理后,解算出定位数据,同时为应用层提供SDK前端和SDK后台接口,此外,服务层还提供了系统设备管理软件,对设备设施进行管理、故障诊断、调试等服务。(3)传输层采用Wⅵ-F和光纤方式进行数据传输,向下将应用层相关指令传输给定位基站,向上将定位原始数据传输给服务层,是定位基站与服务层、感知层之间数据传输通道。(4)设备层主要包括本安型定位基站和本安型定位标签,本安型定位标签按时隙广播携带自身D号的无线信号,本安型定位基站接收到本安型定位标签发送的信号后,将接收到信号的时间戳和本安型定位标签D卡号通过传输层输给服务层解算,完成对本安型定位标签卡的定位,同时本安型定位基站也可以通过传输层接收到应用层下发的指令,完成相关的设置。
- 煤矿人员定位系统各层的主要功能及接口
- 矿用井下人员定位系统功能框图
- 硬件组成架构
- 现场安装示意图
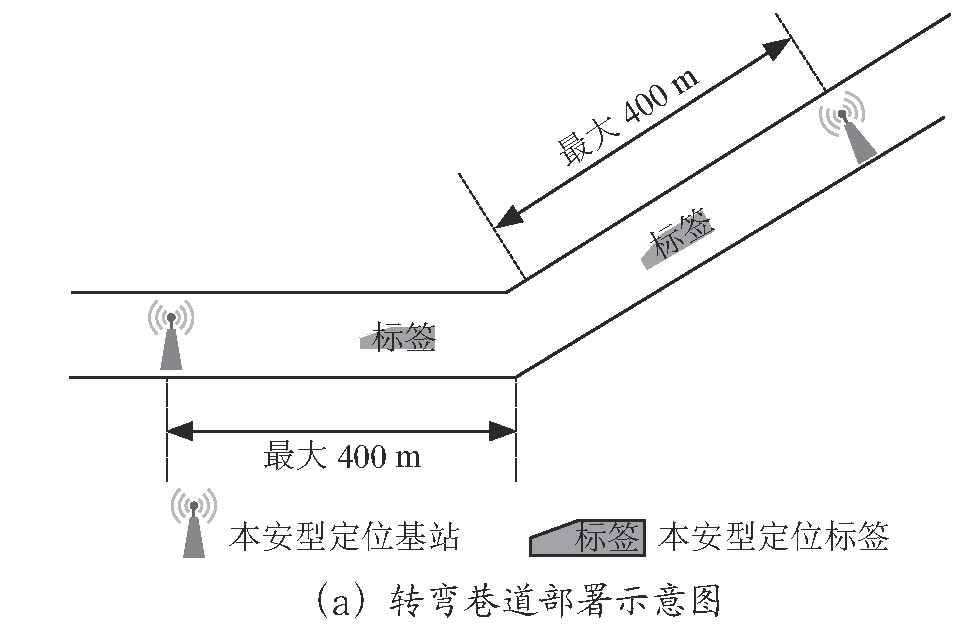
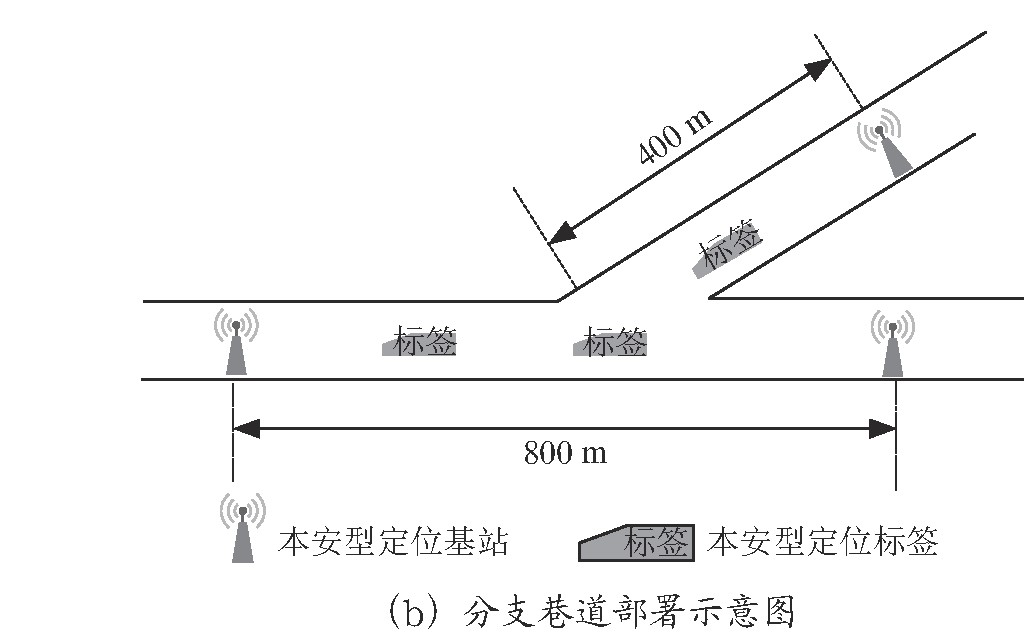
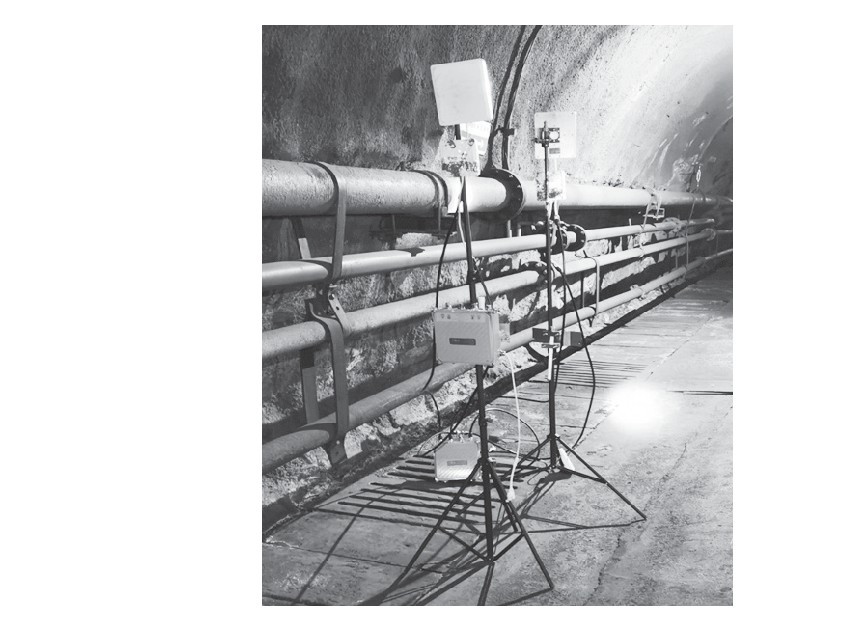
- 现场本安型定位基站的部署方案如图9所示,对于长直巷道,最大每隔800布置一个本安型定位基站,对于转弯巷道,在出弯两端最大400的位置部署本安型定位基站。对于转弯巷道和分支巷道,本安型定位基站部署如图9所示。
- 现场主要设备
- 现场照片
- 测试结果
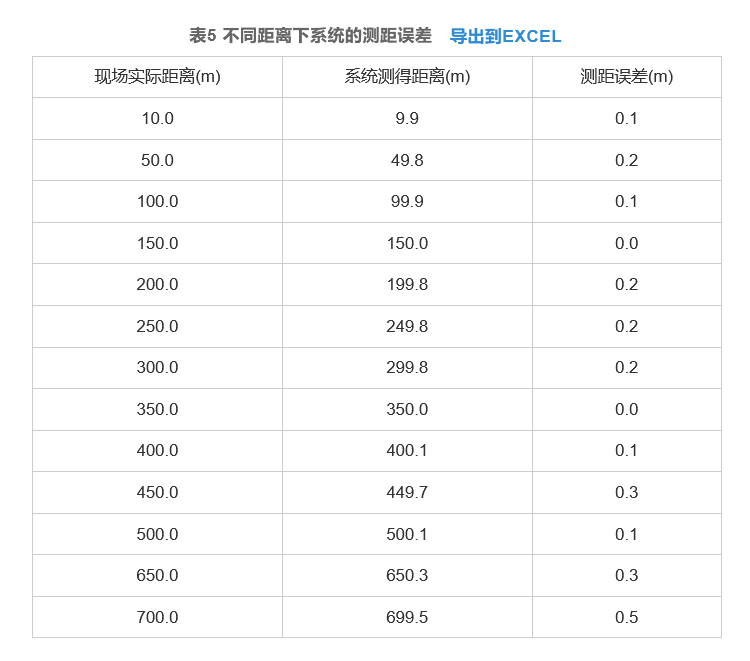
- 测试结果显示,系统本安型定位基站单向覆盖距离能够达到700m左右,但是400m之后测距精度可能达不到0.3m的要求:400范围内定位成功率高:同时系统测试过程中未出现明显的丢失定位标签现象,系统通信成功率高。所设计的人员定位系统在煤矿井下的实际应用场景中表现出良好的性能。
- 精度
- 定位标签卡的静态测距误差不大于0.3 m,覆盖范围不小于400 m
- 优点
- 由于井下的空间相对封闭7],巷道曲折狭小【8],信号衰落快,多径效应明显[9],定位系统接收信号中往往无法分辨直达信号和多径信号,影响时间信息的获取,对定位精度造成影响;而UWB信号具有脉宽窄,距离分辨率高的特点,相对于其他无线定位技术,具有精度较高、覆盖距离远,成本适中等优点,非常适合矿井定位的要求,成为煤矿人员定位技术的首选。
- 与传统的窄带信号不同,从频域上看,UWB信号带宽很大,而时域脉冲宽度窄,同时在每个频点上功率很低。UWB信号具有时域分辨率高,带宽大,不易被截获等特点,被广泛应用于雷达,定位与通信的场景中[11。在煤矿定位场景下,使用UWB信号相对于窄带信号的主要优势在于:UWB信号能准确分离无线传输中的直达信号和多径反射信号,而窄带信号不具备该能力。
UWB 不仅仅能用于定位,还可以传输其他的数据
扩展卡尔曼滤波联合最小二乘定位算法
- 鉴于煤矿井下恶劣条件,为提高定位精度,加强对动态目标定位,矿用井下人员定位系统的定位算法基于扩展卡尔曼滤波联合最小二乘定位算法,提升定位精度。该定位算法实际使用时,分为三个流程:



第一,估算并获取定位标签的起始位置。采用TDOA测距方法获取定位标签到定位分站的距离d;,根据d列出最小二乘估算位置方程组。定义待测定位标签的近似坐标为(xo,yo)’=(0,0),根据Taylor展开并将近似坐标修正为X=(δx,δy)T,及待测定位标签的估计起始位置可表示为坐标(x,y)。
第二,对人员、设备动态目标的运动状态进行判定。进行运动状态判定时,需提前判断该标签是运动状态还是静止状态[6,7),定义待测标签在时刻t的定位作为(x,y),系统最大误差为ε,则有公式(3)和(4):
其中,s为定位开始后位置比较的实践间隔;当该标签的运动状态满足式(3)时,表明该标签静止;当满足式(4)时,表明该标签处于运动状态,即时刻t与时刻t+s之间的位置误差超过最大误差λ倍。为提高人员、设备定位的可靠性和准确性,设置三次标签运动状态检测,若三次检测结果皆为运动状态后才可判定该定位标签处于运动状态。该定位标签的坐标值将作为最小二乘扩展卡尔曼滤波的初值并完成运算。
第三,对人员、设备进行位置估算。对待定位的标签进行扩展卡尔曼滤波并计算协方差以及卡尔曼滤波方程,根据滤波结果输出定位结果。该定位结果会不断更新并逼近最优值,当上位机发出停止位置估算指令后才会停止最优值逼近过程。
2、常用算法、 单基站与双基站的优缺点对比
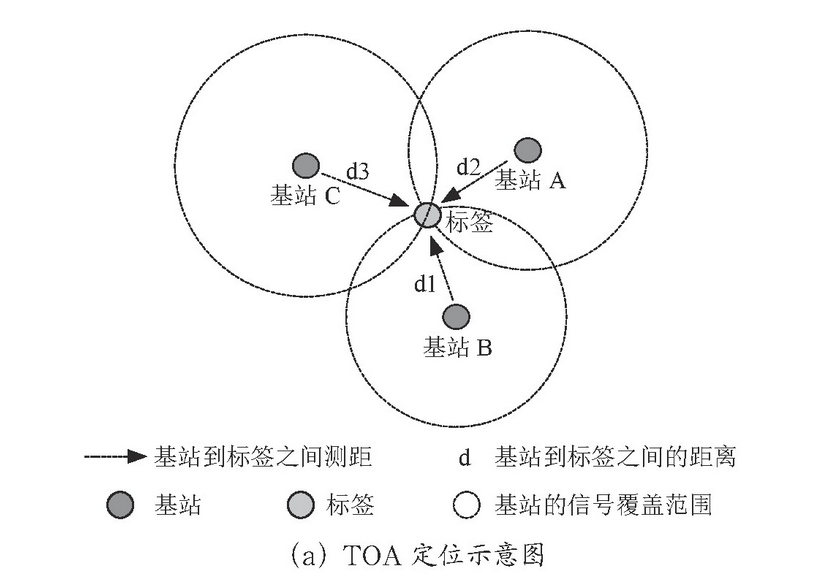
人员定位系统中常用的定位与测距算法,有基于到达时间(Time of Arrival,.TOA)、到达时间差(Difference of Time-Of-Arrival,TDOA),以及基于到达角度(Angle of Arrival,AOA)、到达信号强度(Received Signal Strength Indicatio,RSS)的定位与测距算法等。本系统场景下,针对UWB信号时间分辨率高的特点,更适用于采用基于时延的TOA和TDOA算法,图1()给出了TOA定位算法的示意图,图1(b)给出了TDOA定位算法的示意图。
本系统中,被定位区域布设UWB定位基站,由被定位对象携带UWB定位标签。通过测量定位标签与定位基站距离(或伪距)的关系,从而获得定位对象的位置。具体分为单基站TOA定位和双基站TDOA/TOA定位两种方式:(1)单基站TOA定位方式。UWB单基站一维定位时,定位标签在基站覆盖半径范围内与定位基站测距,同时定位基站通过接收到的UWB信号特征判断定位标签处于基站的哪个方向(在巷道的左边还是右边),通过已知的基站坐标,解算出定位标签的坐标位置。如图2所示。UWB单站定位方式的优点是,覆盖距离远、成本低,站间的距离是基站覆盖半径的叠加;缺点是标签只有一个基站覆盖,系统的冗余度低,且定位标签与基站来回测距,标签续航时间相对较短。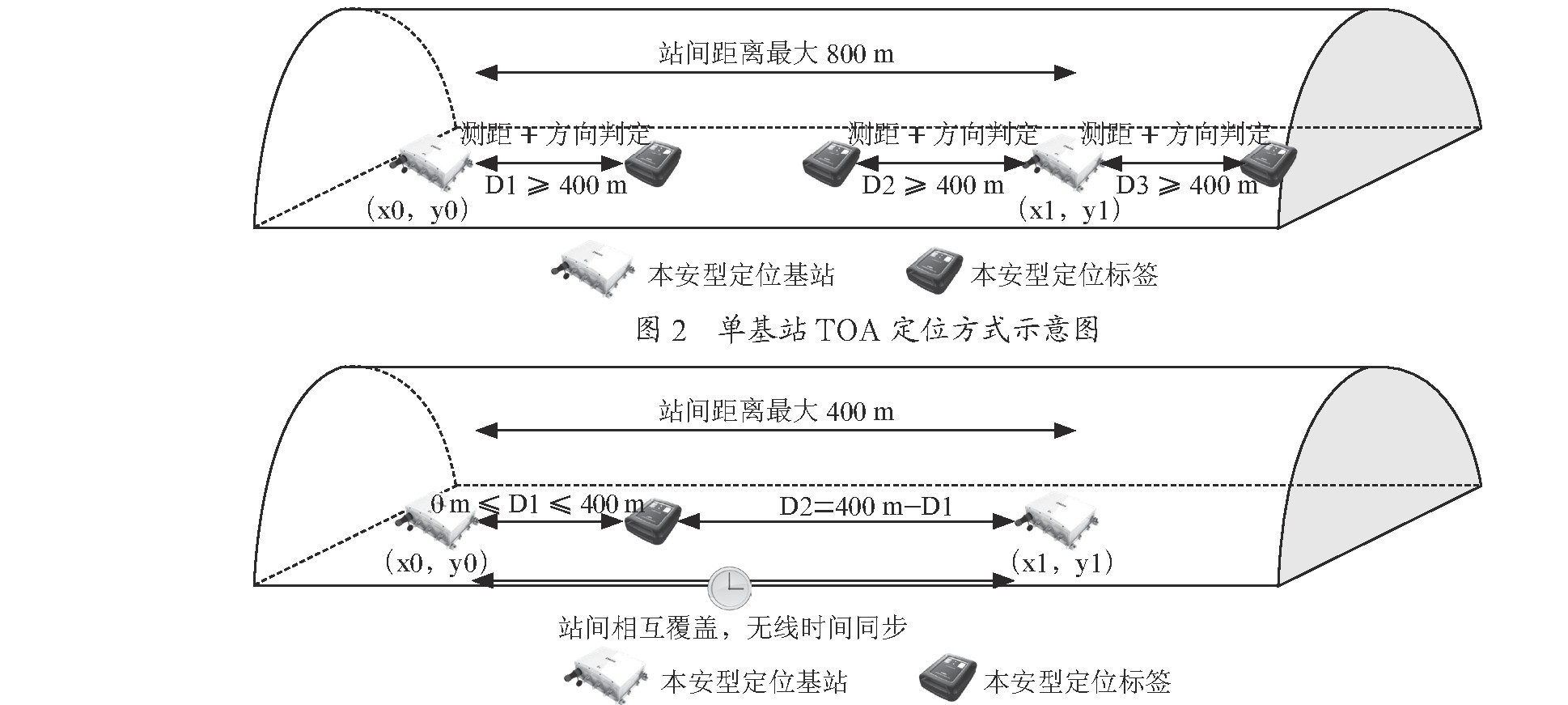
(2)双基站TDOA/TOA定位方式。UWB双基站一维定位,定位标签同时在两个基站覆盖半径范围内与定位基站测量时间差,通过时间差的关系,解算出定位标签的方向和离基站距离进而解算出定位标签的坐标。如图3所示。UWB双基站定位方式的优点是,在TOA模式下,标签单程测距,续航长;而TDOA模式下标签与两个基站都会测距,系统冗余度高:缺点是站间需要相互覆盖,转弯的位置不易部署,覆盖距离相对于单站缩减一半,成本较高。
定位通信系统
- UDP 协议
- 矿用井下人员定位系统通信过程包括定位基站、定位分站、定位系统三部分。定位基站负责测距,定位分站负责将测距结果经TCPP上传至定位系统,定位系统到定位分站为下行过程,反之为上行过程。综合考虑煤矿井下恶劣环境,定位系统通信协议采用UDP协议实现,原因为:①UDP协议数据传输率较高。②能够适应恶劣通信环境,不需建立通信连接,不需反复通信请求。定位系统通信协议数据桢基本结构见表1所示。
ZigBee
LoRa
RFID
- 引言
- 由于矿井的巷道和井下作业人员的分布情况复杂,灾变时难以确定井下人员的数量和位置,难以实现井下的通信以及发生事故后的及时营救。现有的RFID射频读写系统(包括SuperRFID)无法实时地报告井下人员的具体位置,也无法实现井下实时语音通信,只能用于下井人员区域定位和考勤登记。为了满足煤矿井下安全生产的需要,井下人员无线跟踪与定位系统在正常情况下应能为煤矿管理人员提供人员实时监控、进出限制、考勤作业、实时通信等多方面的信息。一旦发生安全事故,通过人员定位监控系统应可以知道被困人员的具体位置,保证抢险救灾和安全救护工作的高效运作。
- 缺点:
- 现有的RFID射频读写系统无法实时地报告井下人员的具体位置,也无法实现井下实时语音通信,只能用于下井人员区域定位和考勤登记
- 原理
- RFID 通过发送射频信号来识别目标节点,然后实现数据传输。基于 RFID 的室内定位系统主要由电子目标节点和 RFID 读卡器组成。定位的基本原理是:通过实验测量未知目标节点与 RFID 读卡器之间的信号强度值,然后通过与已知位置的电子目标节点与 RFID 读卡器之间的信号强度值进行比较,最后利用基于 RSSI 的定位算法得出测量距离[17]。
- LANDAMRK 室内定位系统使用射频识别技术进行定位,已经得到了广泛的推广[18],其系统定位精度为米级。通过基于待测标签与标签读写器之间的信号接收强度值,使用指纹库对比或通过 RSSI 损失模型进行距离求解。RFID 的定位精度主要受信标节点的数量和密度的影响,在定位空间范围内的信标节点数量越多密度越大,则定位精确性越高。但是,多数量高密度的标签堆积会导致标签读取时的碰撞干扰,导致信号紊乱。RFID 定位还因为其功率较小的原因,有传输距离短的缺点。
红外定位
概念
- 红外线发射接收器是一种广泛被用来收集周围环境特性的感知传感器。传感器是利用光子通过发射或检测红外线辐射而实现。另一种定位方式是红外传感器依据物体在空间中的热能变化来对具有热能辐射的物体进行定位监测。红外线技术不但广泛地应用于工业和生活中,也被大部分应用于日常生活中。例如空调、电视等是由遥控仪接收机发射的红外光信号进行控制。而无源红外传感器通常被广泛应用于各种运动监测系统,室外光照常采用光敏电阻传感器。红外传感器有以下优点:低功耗、电路简单、功能便携。在红外电磁波的光谱中,红外微波辐射主要区域位于红外可见光与红外微波两个辐射区域之间。而且接近红外线光的波长一般可以控制在0.75~1000μm 之间。红外光谱范围可以左右划分依次为:近红外、中红外和远红外。0.75~3μm 处的天线波长检测范围,3~6μm 之间的紫外波长区域范围被广泛称为中红色紫外区,波长范围大于 6μm 的红外波长区域范围被广泛称为远红外长波区, 远红外长波区的光波肉眼不可见[13]。红外定位可用于特殊环境定位中,但此方法存在测量距离短、易受可见光影响、抗非视距误差差的缺点
超声波定位
概念
超声波技术是一种可以依靠声波反射进行测距的方法。对比其他基于无线传感网的定位技术,超声波传感器有定位精度高,布设难度低的优点。其对物体的形状和颜色没有要求,可以准确的测量空间中大小物体的具体位置。在特殊环境中应用超声波定位技术,由于环境缺乏直接视距条件且多径干扰强,超声波定位无法发挥其优势,且超声波定位系统造价高昂,成本较高蓝牙
概念
使用蓝牙技术进行定位,分析位置的方法是基于蓝牙信号的接收强度,其与WIFI 的指纹库定位技术相近。基于蓝牙的室内定位解决方案一般会在室内同时部署多个蓝牙微微网络接入点。例如,当一个用户利用主机上的支持蓝牙设备访问时,就可以检测到访问设备的信号强度值来得出一个用户的地址和位置。Ibeacon 是一种目前应用最广泛且成熟的蓝牙定位协议。移动商务购物的应用 Shopkick 以及国内搜索物品的应用均采用了此技术,定位精准可以高达米级,满足一般室内条件下的定位要求[16]。蓝牙无线定位技术的安全程度很高。随着我国移动智能终端技术的进步和发展,基于蓝牙的无线定位系统,具有了成本低、功耗少的优势。但这种定位技术对于复杂的室内环境下,受到噪声和干扰的影响很大,可靠性较低,通信距离短无线WiFi定位
引言-概述
矿井开采属于高危作业,保障矿井员工生命安全是煤矿开采的重中之重。由于矿井高瓦斯、高潮湿、视线昏暗以及片帮脱落、塌方等危险源,发生矿井事故具有不确定性。因此,在发生事故时,如何能够高效率、精准性的对井下人员进行施救成为整个救援工作的关键。煤矿井下人员定位系统能够实时、精准的确定井下被困人员信息,进而可提高搜救效率。国外井下人员定位系统的发展比较成熟,如利用红外线定位技术、射频识别技术、UWB技术等,定位精度从5~10m逐渐精确到0.1~0.15m,系统安全系数逐渐升高、无线信号的穿透力和抗干扰力逐渐增强,系统功耗以及成本逐渐降低1,2,3]。国内井下人员定位系统的发展较为滞后,在借鉴国外先进技术的基础上,逐渐应用煤矿考勤管理系统、无源射频识别技术、无源双频RFID技术、ZigBee无线通信技术、WⅰFi无线通信技术、无线传感器网络技术等,极大的提高了井下人员定位精度,保障了井下人员生命安全[4,5,6]。
但是,煤矿企业实际应用上述人员定位系统时还有以下问题:①定位精度低,还停留在区间定位,无法满足厘米级定位精度;②定位标签卡较少,远小于煤矿安全规程中规定的65000个;③无法将人员位置显示在地图上并实现信心共享;④人员定位系统只能单向通信,无法接收来自井下人员的信息。文章针对上述问题,设计基于无线通信的煤矿井下人员定位系统,重点通过对井下人员定位系统功能需求及实际工况进行分析,设计井下人员定位系统方案,达到井下人员实时精准定位、保障生命安全的目的。原理
WiFi是基于IEEE802.11的无线通信手段,通过WiFi基站周期性的获取覆盖范围内的WiFi终端无线信号,并通过一定的算法估算该终端距离基站的距离以及位置坐标。基于WiF无线通信的定位方位有如下四种7,8]:①基于到达角定位,即基站A、基站B同时检测待测终端信号到达角度差,并利用角度测量方法计算该待测终端的位置坐标;②基于达到时间定位,即待测终端发送信号并达到基站A、基站B,计算信号发出、信号返回的时间差,估算待测终端与基站之间的距离:③基于到达时间差定位,即待测终端向基站A、基站B发射不同强度的信号,并分别计算达到时间以及到达时间差,得到待测终端与基站之间的距离;④基于RSS定位,即根据信号接收强度估计待测终端位置。文中采用RSS定位方法。
Wi-Fi 协议是用于移动设备间无线传输的一种无线局域网中的实现性协议。Wi-Fi 定位技术一般采用基于 RSSI 信号强度的测距方式,使用指纹定位算法,其原理为:在定位区域内进行定位空间的均匀划分,空间内需要多个 WIFI 信号覆盖,在划分区域进行 RSSI 值的采样,记录此块位置的地理位置信息与 WIFI 的 RSSI 值特征,将这些数据收集整理建立 WIFI 定位指纹数据库。在定位过程中,终端采集收到的 WIFI信号特征与指纹库数据进行对比,得到相似程度最高的结果,判断其位置信息[15]。Wi-Fi 定位技术的优点是其无线通信范围广且目前 WIFI 信号覆盖率高部署成本较低。与其它无线定位技术相比,Wi-Fi 定位可以根据基站的特征值完成大面积的室内定位,但是由于前期采集数据等工作量较大,比较难以商用定位方案系统设计
- 煤矿井下人员定位系统总体设计
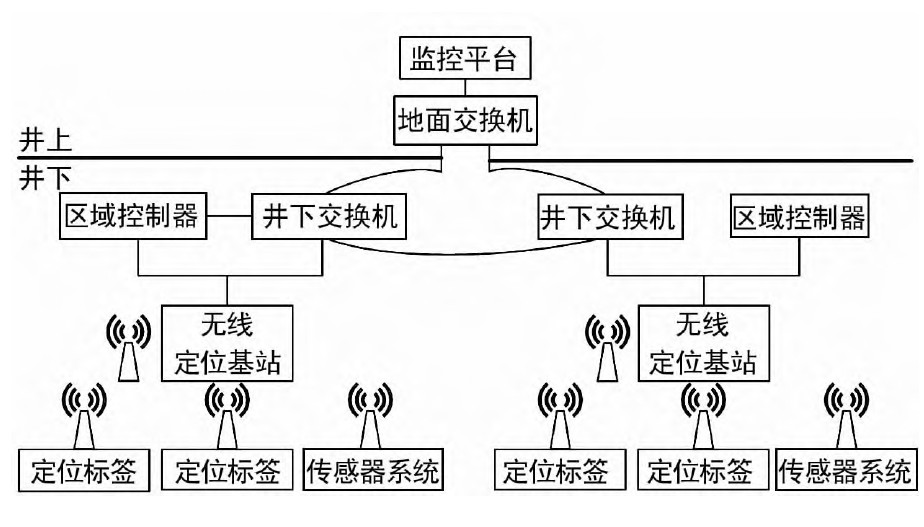
- 井上部分为人员定位系统监控平台,井下所有数据经地面交换机传送至地面监控平台,可实时显示井下定位标签位置坐标信息并在GS地图中动态展示。该监控平台可接收井下定位标签的“求教”信号并迅速定位;还可以发送控制命令,对指定定位标签进行控制。井下部分由区域控制器、井下交换机、定位基站分站以及定位标签组成。布置到井下人员衣服或者设备机身的定位标签以WⅵⅰF无线通信模式实时、周期性的将自身位置坐标信息上传至定位基站分站,然后经区域控制器处理后经井下交换机上数据上传至地面。
系统功能
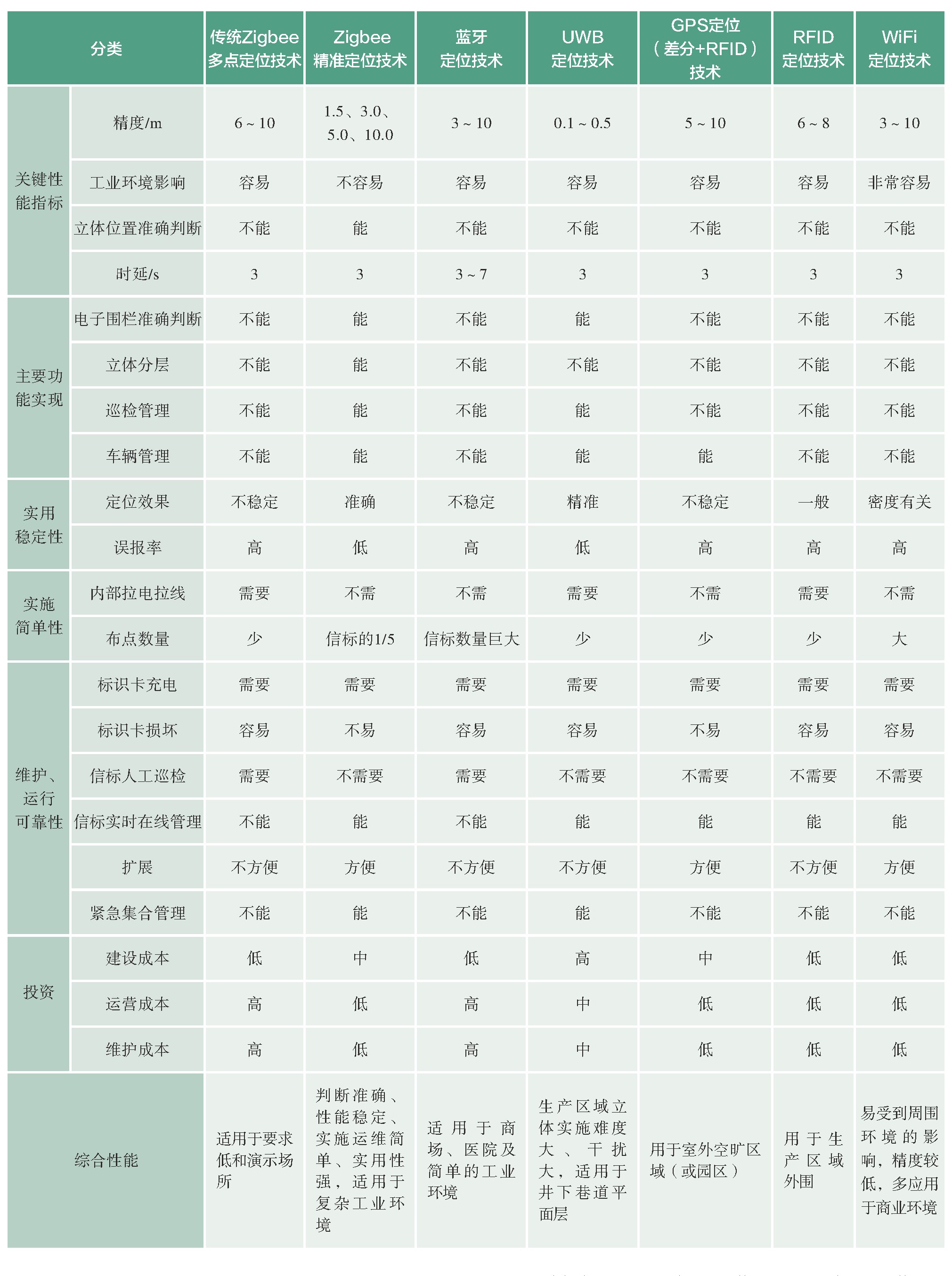
定位技术对比


若有收获,就点个赞吧
0 人点赞
