三维激光
- 激光雷达的原理
- 三维激光扫描技术,又叫实景复刻技术,是通过高速激光扫描测量的方法,大面积、高分辨率地快速获取物体表面各个点的坐标、反射率、颜色等信息,将实物的立体信息转换为计算机可处理的数字信号,由这些大量、密集的点信息可快速复建出1:1 的真彩色三维模型,为复建出被测目标的三维模型提供了方便快捷的手段。
- 三维激光扫描技术是利用激光信号检测物体,向检测区域发送信号,根据信号的旋转计算距离,准确记录坐标的对象。将扫描得到的数据计算得到的离散云点组合成三轴坐标,以此来确定物体的反射强度值。




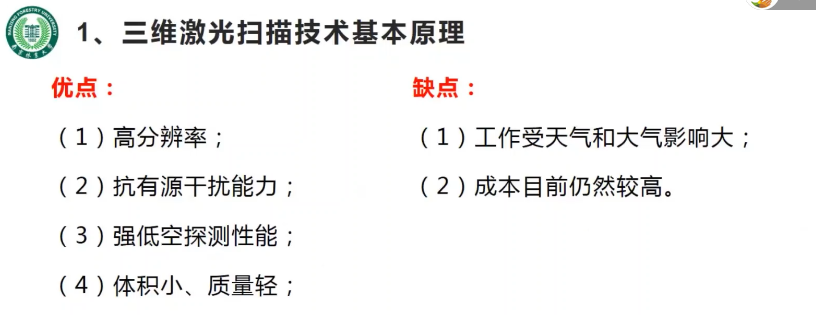
- 三维激光的优缺点
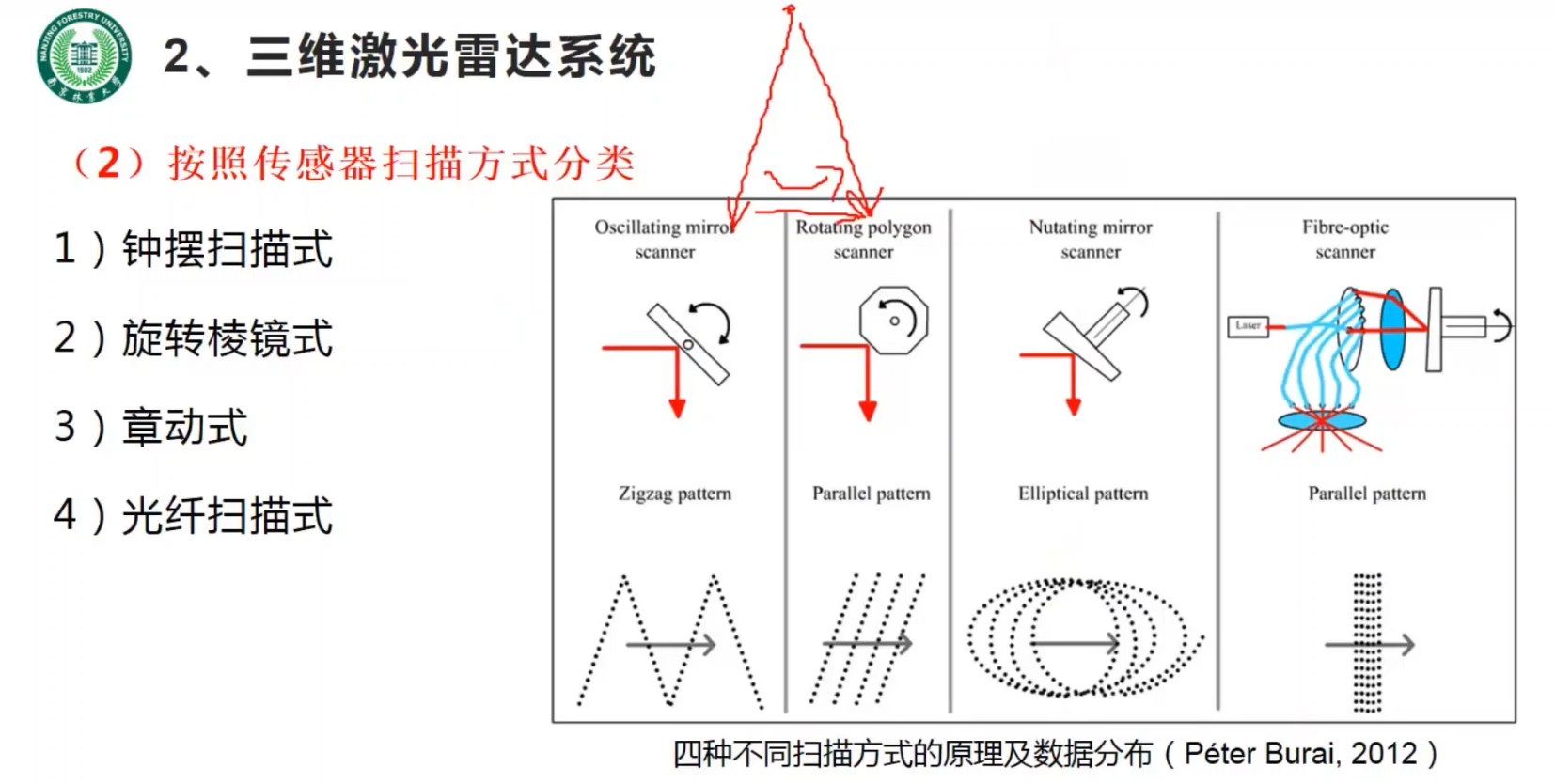
- 激光雷达的扫描方式
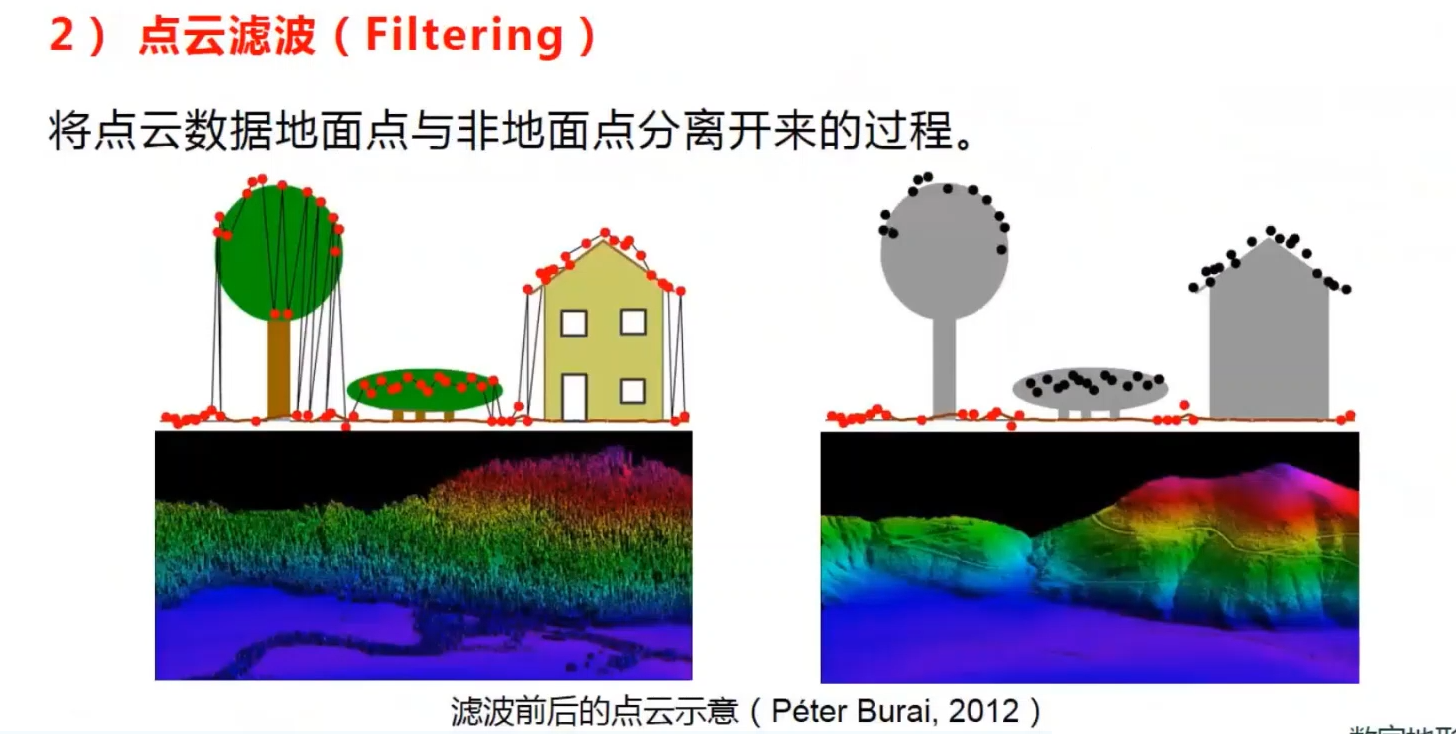
- 点云数据的处理方式
- 点云常用的处理软件
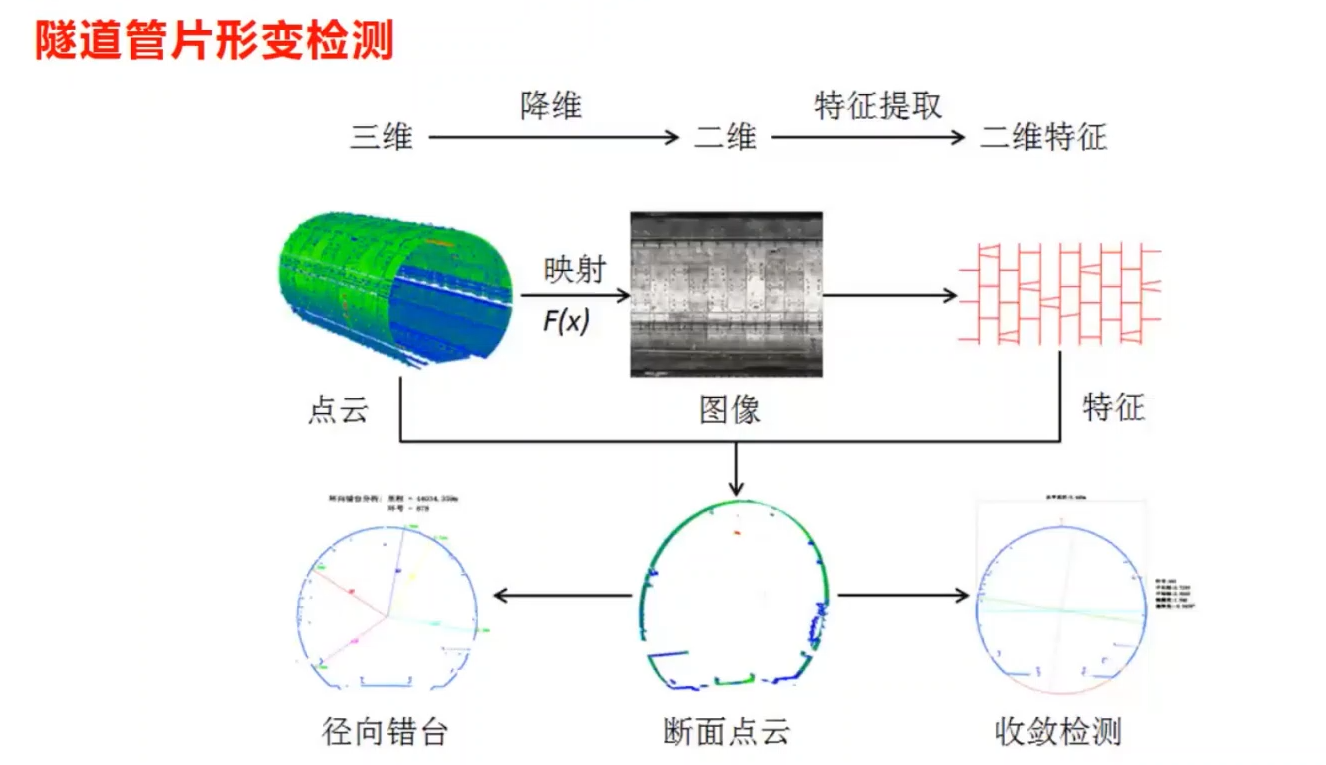
- 行业应用










电子陀螺仪,惯性测量单元,IMU
摄影测量与遥杆技术
- 简介
- 倾斜摄影测量是最近发展起来的一项高新技术,在不断的研究下,这一技术得到了新的发展,无人机倾斜摄影测量应运而生。随着科技的不断发展,无人机倾斜摄影测量在各行各业得到了广泛的应用,并促进了相关行业的发展,如智慧城市、城市规划、国土资源等方面。为此,论文在分析无人机倾斜摄影测量基础上,对该技术的应用进行探讨,以此推进无人机倾斜摄影测量的应用和发展。
- 2.2倾斜摄影测量与传统摄影测量的区别
- 倾斜摄影测量是通过获取研究区域各摄站点含垂直、前视、后视、左视、右视5个方向的影像,生成三维实景模型来研究被摄区域地物的平面位置、大小、性质、形状、侧面、立面、纵横断面、地形起伏及场景模拟等特征的高新技术方法。而传统的摄影测量主要是通过获取研究区域各摄站点的中心投影影像生成正射影像来研究被摄地物的平面位置、大小、形状和性质。传统的摄影测量主要用于生产正射影像、测制各种比例尺地形图;而倾斜摄影测量除了可以生产正射影像、测制各种比例尺地形图,还能生产三维实景模型,测量地物的侧立面和纵横断面,进行三维场景模拟等,360°无死角地对地物进行研究,极大地扩展了摄影测量的应用。
- 原理
- 斜摄影测量就是随着科技发展而产生的一项重要科技。它是通过同一飞行平台搭载多台传感器同步采集影像,获取真实的地物信息而被广泛应用在经济建设的多个领域中,充分发挥了它的优势。随着倾斜摄影测量的发展,在航摄效率、清晰度、分辨率等方面有了更高的要求,促进了倾斜摄影测量的革新并向无人机倾斜摄影测量转变。无人机倾斜摄影测量的出现,极大地扩展了摄影测量的应用。
- 倾斜摄影技术是国际测绘领域近些年发展起来的一项高新技术,它颠覆了以往正射影象只能从垂直角度拍摄的局限,通过在同一飞行平台上搭载多台传感器,同时从一个垂直、四个倾斜等五个不同的角度采集影像,将用户引入了符合人眼视觉的真实直观世界。
- 摄影测量的相关内容介绍
- 摄影测量【photogrammetry】指的是通过影像研究信息的获取、处理、提取和成果表达的一门信息科学。从传统意义上来讲,是利用光学摄影机或数码相机获取的像片,经过处理以获取被摄物体的形状、大小、位置、特性及其相互关系的一门科学。主要用于测绘各种比例尺的地形图、建立数字地面模型,为各种地理信息系统和土地信息系统提供基础数据,在工程建设方面发挥着十分关键的作用,
遥感技术的相关内容介绍
简介
- 同时定位与地图构建
- SLAM是“Simultaneous Localization and Mapping”的缩写,译为“同时定位与地图构建”。它是指搭载特定传感器的主体,在对周围环境未知的情况下,在运动过程中建立周围环境的模型,同时估计自己的运动。就不同的传感器而论,SLAM技术分为两类:如果传感器是激光雷达,则称为激光SLAM;如果传感器为相机(摄像头),则称为视觉SLAM。
工作原理
打个比喻
- 我们可以打一个通俗的比喻。当你去外地旅游,为了迅速熟悉周围环境,找到挑选好的餐馆吃饭,并且找到预定好的宾馆入住,你需要完成以下事情:
- 用眼睛观察周围的地标建筑,比如学校、银行、便利店等等,并且记住他们的特征——特征提取。
- 根据眼睛所观察到的环境信息,在脑海里构建一个包含这些标志性建筑物的地图,对他们的方位有一定的掌握——三维建图。
- 在行进的过程中,会遇到新的地标建筑,比如咖啡馆、餐厅、商场,根据获取到的它们的方位信息,校正自己脑海里的地图模型——状态更新。
- 根据之前行进过程遇到的地标建筑,确定自己所处的位置——路径规划。
当无意中行进了很长的一段路以后,与脑海中的标志性建筑进行匹配,查看自己是否走回了原路——回环检测。
2、卫星导航
定位导航的概念
应用场景
应用场景
- 蚂蚁,蜜蜂,蝇类
原理:
应用场景
- 信鸽,龙虾,海龟,细菌等

无人驾驶
1-绪论
- 发展历程
- 无人驾驶等级
- L 1- L 6几个级别
- 无人驾驶应用的场景有哪些?
- 园区,矿山
无人驾驶的车辆结构组成
激光雷达
- 毫米波雷达
-
3-无人驾驶车辆环境感知技术
结构化道路车道线检测
- 越野环境可通行区域检测
- 交通信号灯与交通标志检测
-
4-无人驾驶车辆定位导航
全球卫星导航定位
- GPS / 北斗组合定位
-
5-无人驾驶车辆路径规划
路径规划概述
- 环境地图表示方法
- 常用算法介绍
-
6-无人驾驶车辆路径跟踪
阿克曼转向车辆运动学
- 阿克曼转向车辆路径跟踪算.
- 速差转向车辆运动分析
-
7-无人驾驶车辆设计与测试
功能需求分析与总体设计
- 分系统设计
-
8-V-REP仿真软件入门材料
V-REP基本操作
- V-REP独立仿真
- V-REP与Matlab联合仿真
- Lua语法简要说明

若有收获,就点个赞吧
0 人点赞
