874. 模拟行走机器人
机器人在一个无限大小的网格上行走,从点 (0, 0) 处开始出发,面向北方。该机器人可以接收以下三种类型的命令:
-2:向左转 90 度-1:向右转 90 度1 <= x <= 9:向前移动x个单位长度在网格上有一些格子被视为障碍物。 第
i个障碍物位于网格点(obstacles[i][0], obstacles[i][1])机器人无法走到障碍物上,它将会停留在障碍物的前一个网格方块上,但仍然可以继续该路线的其余部分。 返回从原点到机器人所有经过的路径点(坐标为整数)的最大欧式距离的平方。 示例 1:
输入: commands = [4,-1,3], obstacles = []输出: 25解释: 机器人将会到达 (3, 4)
示例 2:
输入: commands = [4,-1,4,-2,4], obstacles = [[2,4]]输出: 65解释: 机器人在左转走到 (1, 8) 之前将被困在 (1, 4) 处
提示:
0 <= commands.length <= 100000 <= obstacles.length <= 10000-30000 <= obstacle[i][0] <= 30000-30000 <= obstacle[i][1] <= 30000- 答案保证小于
2 ^ 31
解题思路
先把题目搞明白,解释题目中示例2的意思
示例 2:
输入: commands = [4,-1,4,-2,4], obstacles = [[2,4]]
输出: 65
解释: 机器人在左转走到 (1, 8) 之前将被困在 (1, 4) 处
输入:commands和obstacles,其中 obstacles = [[2,4]] 的意思是坐标点(2,4)代表障碍物的坐标
输出:机器人所经过的每个坐标点(x,y)到原点的欧式距离的平方的最大值
欧式距离: 
欧式距离的平方: 
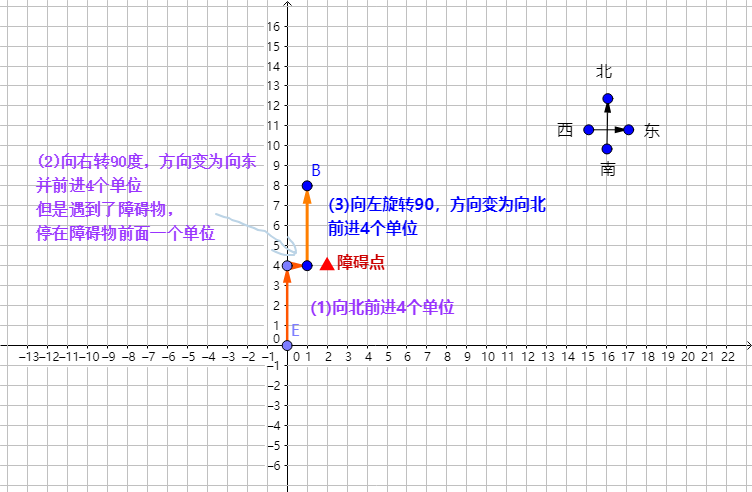
如上图所示:
机器人初始位置为坐标点(0,0),初始方向为向北
读取第一个指令为4,沿着当前方向“北”,向前走4个单位,停在坐标点(0,4)
读取第二个指令-1,该指令表示“向右转90度”,那么机器人就由原来的“北”右转90度之后方向变为“东”
读取第三个指令4,沿着当前方向“东”,向前走4个单位,但是发现坐标点(2,4)是一个障碍物,不能跨越障碍物,
只能停留在障碍物前面一个单位,即坐标点(1,4)
读取第四个指令-2,该指令表示“向左转90度”,那么机器人就由原来的“东”左转90度之后方向变为“北”
读取第五个指令4,沿着当前方向“北”,向前走4个单位,停在坐标点(1,8)
65怎么得来的? 机器人所经过的这些点中,(1,8)计算出的欧式距离的平方最大,为 
代码实现
参考官方题解,可以提交通过,注意注释
/*
命令:
-2:向左转 90 度
-1:向右转 90 度
1 <= x <= 9:向前移动 x 个单位长度
obstacles = [[2,4]] 的意思是坐标点(2,4)代表障碍物的坐标
每一步怎么走? 走( direx[i], direy[i] ),加上当前坐标后为 (curx,cury) + ( direx[i], direy[i] )
direx[],direy[] 要竖着对齐看
向北,坐标轴上x不动,y+1
向东,坐标轴上x+1,y不动
向南,坐标轴上x不动,y-1
向西,坐标轴上x-1,y不动
*/
class Solution {
public:
int robotSim(vector<int>& commands, vector<vector<int>>& obstacles) {
int direx[] = {0,1,0,-1};
int direy[] = {1,0,-1,0};
int curx=0,cury=0;
int curdire = 0;
int comLen = commands.size();
int ans = 0;
set<pair<int, int>> obstacleSet;
for(int i=0;i<obstacles.size();i++)
obstacleSet.insert(make_pair(obstacles[i][0], obstacles[i][1]));
for(int i=0;i<comLen;i++){
if(commands[i] == -1){ // -1:向右转 90 度
curdire = (curdire + 1) % 4;
}else if(commands[i] == -2){ // -2:向左转 90 度
curdire = (curdire + 3) % 4;
}else{ // 1 <= x <= 9:向前移动 x 个单位长度
for(int j=0;j<commands[i];j++){
//试图走出一步,并判断是否遇到了障碍物,
int nx = curx + direx[curdire];
int ny = cury + direy[curdire];
//当前坐标不是障碍点,计算并与存储的最大欧式距离的平方做比较
if (obstacleSet.find(make_pair(nx, ny)) == obstacleSet.end()) {
curx = nx;
cury = ny;
ans = max(ans, curx*curx + cury*cury);
}else{
//是障碍点,被挡住了,停留,只能等待下一个指令,那可以跳出当前指令了
break;
}
}
}
}
return ans;
}
};
注:
set和unordered_set底层分别是用红黑树和哈希表实现的。
unordered_set不能用来保存pair
因为unordered_set是基于哈希的,而C++并没有给pair事先写好哈希方法。
set是基于比较的树结构,所以pair里的数据结构只要都支持比较就能储存。

若有收获,就点个赞吧
0 人点赞
