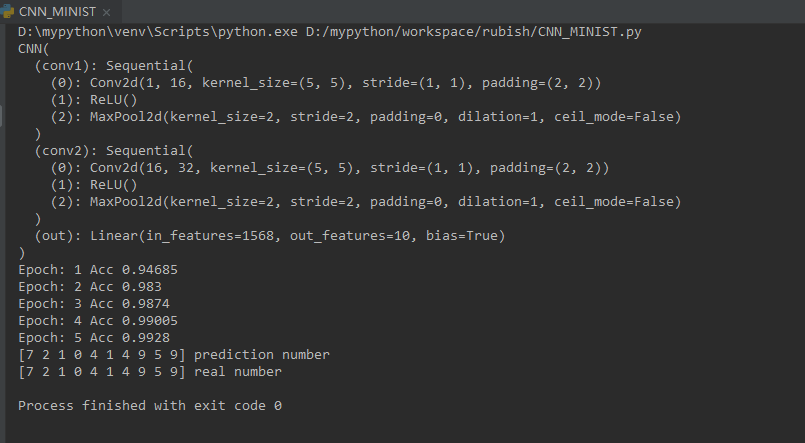
import torchimport torch.nn as nnimport torch.utils.data as Dataimport torchvisionimport matplotlib.pyplot as plttorch.manual_seed(1) # reproducible# Hyper ParametersEPOCH = 5 # 训练整批数据多少次, 为了节约时间, 我们只训练一次BATCH_SIZE = 50LR = 0.001 # 学习率DOWNLOAD_MNIST = True # 如果你已经下载好了mnist数据就写上 False# Mnist 手写数字train_data = torchvision.datasets.MNIST(root='mnist', # 保存或者提取位置train=True, # this is training datatransform=torchvision.transforms.ToTensor(),download=DOWNLOAD_MNIST,)test_data = torchvision.datasets.MNIST(root='mnist', train=False)# 批训练 50samples, 1 channel, 28x28 (50, 1, 28, 28)train_loader = Data.DataLoader(dataset=train_data, batch_size=BATCH_SIZE, shuffle=True)# 为了节约时间, 我们测试时只测试前2000个test_x = torch.unsqueeze(test_data.data, dim=1).type(torch.FloatTensor)[:2000]/255. # shape from (2000, 28, 28) to (2000, 1, 28, 28), value in range(0,1)test_y = test_data.targets[:2000]class CNN(nn.Module):def __init__(self):super(CNN, self).__init__()self.conv1 = nn.Sequential( # input shape (1, 28, 28)nn.Conv2d(in_channels=1, # input heightout_channels=16, # n_filterskernel_size=5, # filter sizestride=1, # filter movement/steppadding=2, # 如果想要 con2d 出来的图片长宽没有变化, padding=(kernel_size-1)/2 当 stride=1), # output shape (16, 28, 28)nn.ReLU(), # activationnn.MaxPool2d(kernel_size=2), # 在 2x2 空间里向下采样, output shape (16, 14, 14))self.conv2 = nn.Sequential( # input shape (16, 14, 14)nn.Conv2d(16, 32, 5, 1, 2), # output shape (32, 14, 14)nn.ReLU(), # activationnn.MaxPool2d(2), # output shape (32, 7, 7))self.out = nn.Linear(32 * 7 * 7, 10) # fully connected layer, output 10 classesdef forward(self, x):x = self.conv1(x)x = self.conv2(x)x = x.view(x.size(0), -1) # 展平多维的卷积图成 (batch_size, 32 * 7 * 7)output = self.out(x)return outputcnn = CNN()print(cnn) # net architecturecnn=cnn.cuda()optimizer = torch.optim.Adam(cnn.parameters(), lr=LR) # optimize all cnn parametersloss_func = nn.CrossEntropyLoss() # the target label is not one-hotted# training and testingfor epoch in range(EPOCH):to=0ac=0for step, (b_x, b_y) in enumerate(train_loader): # 分配 batch data, normalize x when iterate train_loaderb_x=b_x.cuda()b_y=b_y.cuda()output = cnn(b_x) # cnn outputloss = loss_func(output, b_y) # cross entropy lossoptimizer.zero_grad() # clear gradients for this training steploss.backward() # backpropagation, compute gradientsoptimizer.step() # apply gradientspred_y = torch.max(output, 1)[1].data.cpu().numpy().squeeze()acc_y=b_y.data.cpu().numpy()for i in range(len(pred_y)):if acc_y[i]==pred_y[i]:ac+=1to+=1print("Epoch:",epoch+1,"Acc",ac/to)test=test_x[:10].cuda()test_output = cnn(test)pred_y = torch.max(test_output, 1)[1].data.cpu().numpy().squeeze()print(pred_y, 'prediction number')print(test_y[:10].cpu().numpy(), 'real number')

若有收获,就点个赞吧
0 人点赞
