1 概述
机械臂搬运AGV的电气控制系统主要由斯坦德标准300UL产品以及非标设备构成。
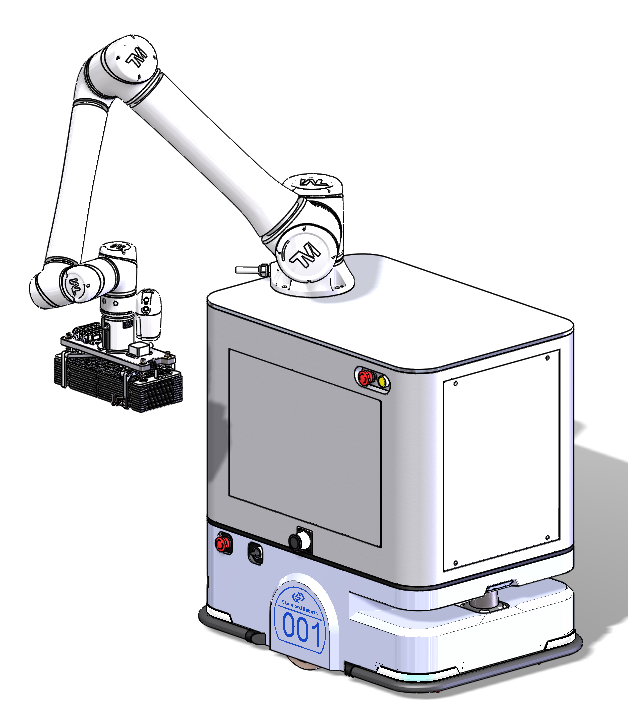
其中,300UL标准车体相关说明,请参考斯坦德标准产品文件。机械臂搬运机构,主要由艾利特四轴机械臂、夹爪系统以及电气系统构成。本文主要介绍机械臂搬运机构,包含电气安全、电气拓扑、设备常规操作、HMI控制以及警报排查等相关方面。通过本章的学习,设备操作人员、维护人员可以掌握设备的基本操作。
需要指出的是,设备的前后左右定义规范为:
用户面向车体触摸屏,车体雷达侧定义为前方;车体触摸屏侧定义为后方;面向触摸屏右手侧为右方;面向触摸屏左手侧为左方。实际电气线路与标识、PLC程序动作、HMI操作等,均遵循此定义规范。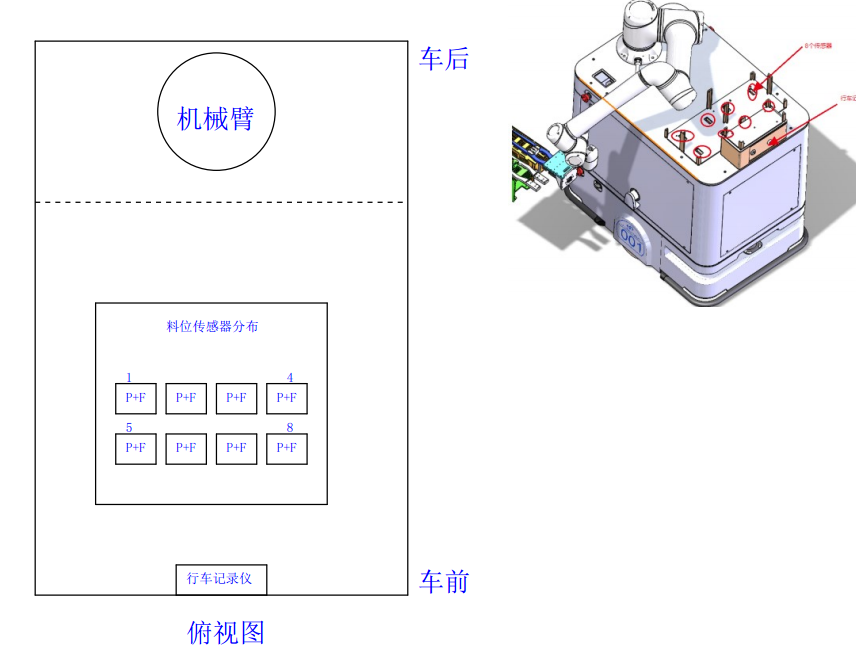
2 电气安全
2.1注意事项
| 注 意 |
|---|
| 使用本设备时,操作者需掌握基本的电气知识并经过电气安全培训。使用过程中,操作者不允许随意更改系统设置参数,以免操作不必要的人身伤害或设备损坏。 |
2.2安全元器件
整体系统由300UL车体及机械臂搬运机构构成。<br /> 300UL车体中,共包含2个急停按钮(分别位于车体两侧)、安全触边(位于车体四周)、安全避障雷达(位于车体前侧)等。<br /> 机械臂搬运机构中,共包含2个急停按钮(分别位于机构左右两侧)、2个避障雷达(分别位于机构左右两侧)。<br /> 通过本套安全系统,可确保用户在使用过程中的人身安全,并在紧急情况下可以及时中止设备运行。
2.3急停按钮介绍
机械臂搬运机构中,急停按钮2组NC常闭触点。其中一组急停触点,与系统中的其他急停按钮NC常闭触点串联,组成一个急停回路。另一组急停触点,分别连接到IO模块中,用于表示单独急停按钮被按下并形成冗余设计。<br /> 发生急停状况时,用户可就近拍下急停按钮,系统会立即终止动作,系统发生警报并无法再次启动。<br /> 紧急状况解除后,用户可旋转解开急停按钮,并通过复位按钮解除系统警报状态,可重新启动系统。<br /> 
2.4避障雷达
机械臂搬运机构中,避障雷达通过线缆连接至600UL控制系统中,通过实时判定当前设定区域内是否存在障碍物,对设备进行控制。
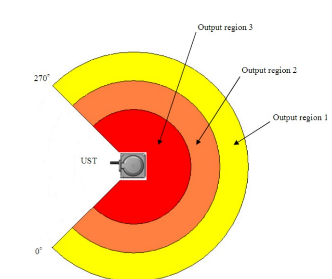
如下图所示<br />当在设定区域内出现障碍物后,系统会终止运动,系统触发报警系统发生警报并无法再次启动。<br /> 当设定区域内没有障碍物,系统通过复位方式完成警报解除,系统可再次启动,继续相关的动作。
3.电气系统
本章节,主要介绍当前设备的主要配电回路、控制系统等部分,以便用户理解整体电气系统。
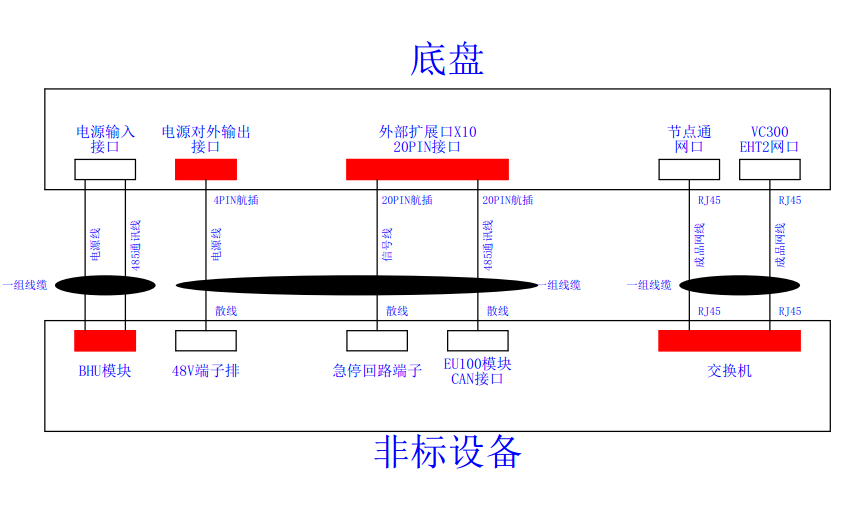
3.1配电介绍
如下图所示,机械臂搬运机构主电源来自于600UL底盘。通过600UL底盘对外供电口,将48VDC主电源连接至主控柜中。主控柜作为非标设备的核心控制,将主电源进行转换以处理(如24VDC),并分别供给机械臂以及传感器等设备
| 危 险 |
|---|
| 请操作人员注意用电安全并遵守规则制度,避免引起触电的危险,造成人身伤害! |
3.2控制系统介绍
如下图所示,机械臂控制箱作为非标设备的核心控制器,通过IO通讯、总线通讯等形式,连接非标设备的各类元器件,如夹爪、检测传感器等。<br /> 机械臂控制箱与300UL车体之间,通过总线通讯方式进行通讯连接。<br /> 当中控系统向车体发送动作指令后,车体将指令发送到机械臂控制箱中,机械臂控制箱对相关工位进行动作控制,例如抓取物料、放置物料等,同时机械臂控制箱实时传送当前非标系统的状态信息并同步到车体控制器中。
其中,达明机械臂控制系统由控制箱、机械人本体以及示教器构成


以下是从紧急停止按钮开始,以逆时针顺序介绍每个按钮的功能:
1. 紧急停止按钮用于紧急情况发生时或者用户需要切断机器人的电源。
2. 模式选择器用于将模式设置为自动(PLAY)、示教(TEACH)或远程(REMOTE)。如果将此开关从自动(PLAY)移到示教(TEACH),则当前运行的程序将立即结束。
3. LED 指示灯会通知用户电源是否打开、是否有报警以及机器人伺服系统启动情况。
4. 状态控制按钮用于在不使用触摸屏的情况下从状态控制菜单中选择项目。
5. 子菜单按钮允许用户从子菜单中选择菜单项,也无需使用触摸屏。
6. 高级功能按钮允许用户查看当前屏幕上可用的高级功能。当用户从子菜单中选择可用的
高级功能时,必须按住该按钮。
7. 当机器人处于自动(PLAY)模式时,可以使用以下按键来对当前运行的机器人程序进行控制或调整。
(a). 橙色按钮 V+ 和 V-用于增加和减少机器人的运行速度。
(b). 黄色伺服按钮用于在程序运行前激活伺服。除非按下此按钮且黄色伺服指示灯 LED点亮,否则机器人无法运行程序。
(c). 绿色运行按钮用于运行程序或单步执行程序(参见第 6.8 节)。它还用于移动到已记录的路点来检查其位置。
(d). 红色暂停按钮将暂停当前正在运行的程序。
8. 轴运动按钮用于依照当前坐标系移动机器人。
9. 滚轮用于滚动机器人程序的行。一般情况下滚轮是禁用的。若需启用,用户可将滚轮朝示教器方向按下。若需禁用,则再次按下滚轮即可。
示教器背面的伺服安全开关 用于激活伺服电机。用户必须保持按住它并且确保伺服
指示灯 LED 点亮,机器人才能移动。模式也必须设置为示教(TEACH)。示教器背面还有一
个触控笔放置处。
3.操作规范
操作规范章节,主要介绍设备的操作流程,包括启机、生产、断电等部分,用户根据此章节可完成基本的设备操作。
3.1上电流程
1.上电操作
a .检查设备强弱电回路是否正常,如端子接线是否存在松动等
b.将600UL车体三挡旋钮开关,旋至第三档,完成车体上电过程
c.使用非标设备黄色上电按钮(长按超过1s)或者使用机器人控制棒,将机械臂系统上电
2.上电状态
上电成功后
600UL车体触摸屏显示主画面
非标设备工位检测传感器指示灯亮起
达明机械臂末端指示灯亮起
- 说 明 |
|---|
| 车体整体采用48VDC主电源 |
3.2启机流程
**1.启机前**<br /> a.主要查看设备各执行器件是否存在异常,检查各执行机构(如:机械臂)的运动方向是否存在障碍物及干涉,确认工位上的物料情况(如:是否存在物料,物料是否位于工位规定位置)<br /> b.检查车体运动轨迹方向是否有障碍物,并及时将障碍物清理,避免料车在运动过程中因障碍物的存在发生碰撞而导致机械设备损坏;<br /> c.检查设备急停按钮是否被按下,如果急停按钮处于释放状态,请按下急停按钮,以免设备在上电过程中存在误动作<br /> **2.启机操作**<br /> 在完成启机前检查后,进行启机操作<br /> 流程如下:<br /> Step1:通过三挡旋钮开关完成设备上电<br /> Step2:解除系统急停状态<br /> Step3:按下黄色上电按钮或通过机械臂控制棒,完成机械臂上电<br /> Step4:机械臂完成上电后,通过按下绿色运行按钮或通过机械臂控制棒,完成机械臂运行启动(进入自动模式)<br /> Step5:确认系统无警报,并处于待机状态<br /> **3.启机状态**<br /> 启机成功后<br />600UL车体指示灯为蓝色
| 注 意 |
|---|
| 为保证设备安全,在设备运行前,需严格检测非标运动机构无干涉物且物料摆放合理 |
3.3断电流程
_ _a.将机械臂移动到安全位置
b.检测设备的物料状态是否在规定位置
c.确保各类生产数据进行保存
d.巡视设备周边环境状况,检查是否有火种或高温物体存在,预防火灾,消除安全隐患
e.检查确认安全后,通过长按黄色按钮或者机械臂控制棒,对机械臂进行断电
f.机械臂完全断电后(末端指示灯熄灭),通过三挡旋钮开关,旋至一档,完成设备整体断电
需要注意的是,断电时序中,必须确保机械臂控制系统完全断电后,才能通过三挡开关对设备整体进行断电,否则可能会造成机械臂控制系统数据丢失、甚至死机。
4.机械臂控制
机械臂具体控制以及编程界面,还请参考机械臂相关用户手册
5.动作指令列表
动作指令,表示上位机发送给PLC系统的动作编号,进而控制非标设备进行相应的动作。具体如下:
6.警报列表
警报列表表示机械臂在具体执行任务过程中,出现的相关故障信息,具体如下:
7.总结
以上,即为电气使用手册的全部内容,系统介绍了电气安全、电气系统、操作流程、软件操作以及参数设置和警报处理,希望通过以上介绍,用户可以对本设备有一基本的了解,并掌握基本的操作规范与操作流程。

若有收获,就点个赞吧
0 人点赞
