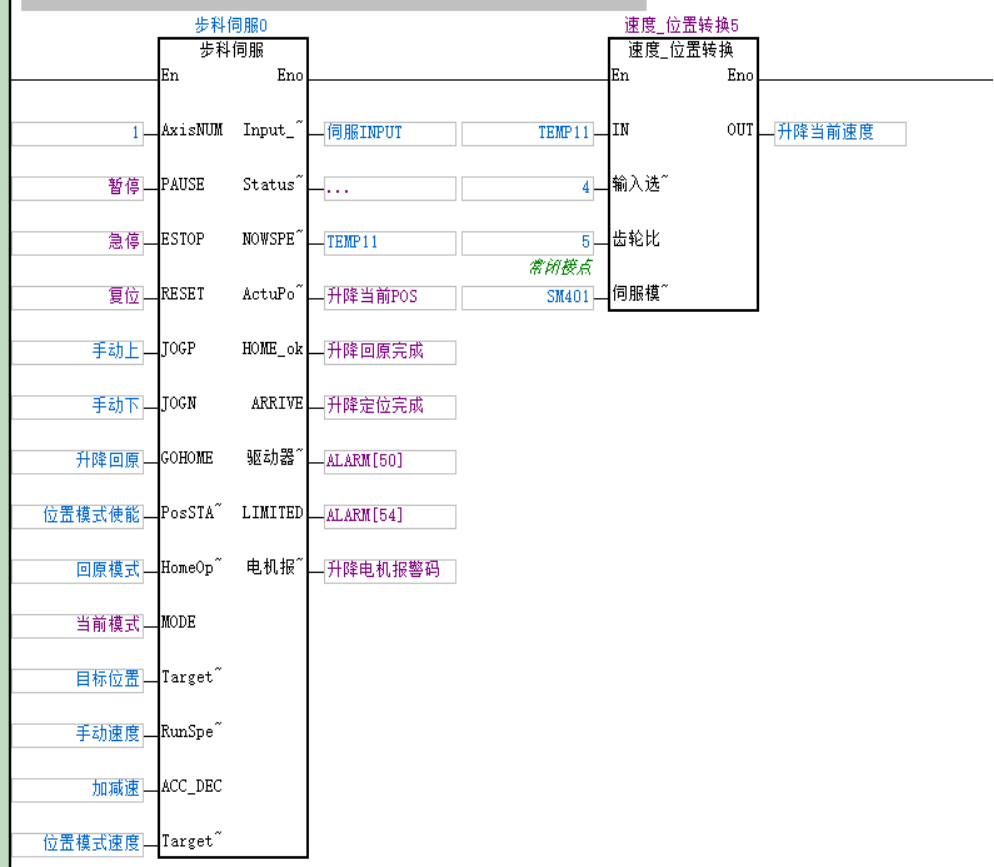
一、说明
该功能块主要针对CANOPEN与主程序的伺服控制交互
该功能块以FB形式编写,设计人员根据VAR_IN VAR_OUT接口进行配置
设计人员在调用前请先细读文章《台达PLC-步科伺服CANopen程序》
设计人员调用前需确认轴控硬件配置(PDO映射)是否正确,配置时需严格按照要求进行,不允许私自更改PDO映射
设计人员调用前请先确认E0 E1 三个特殊寄存器未在其他地方使用
该功能块原则上不允许对变量及内部程序进行任何更改
二、接口说明
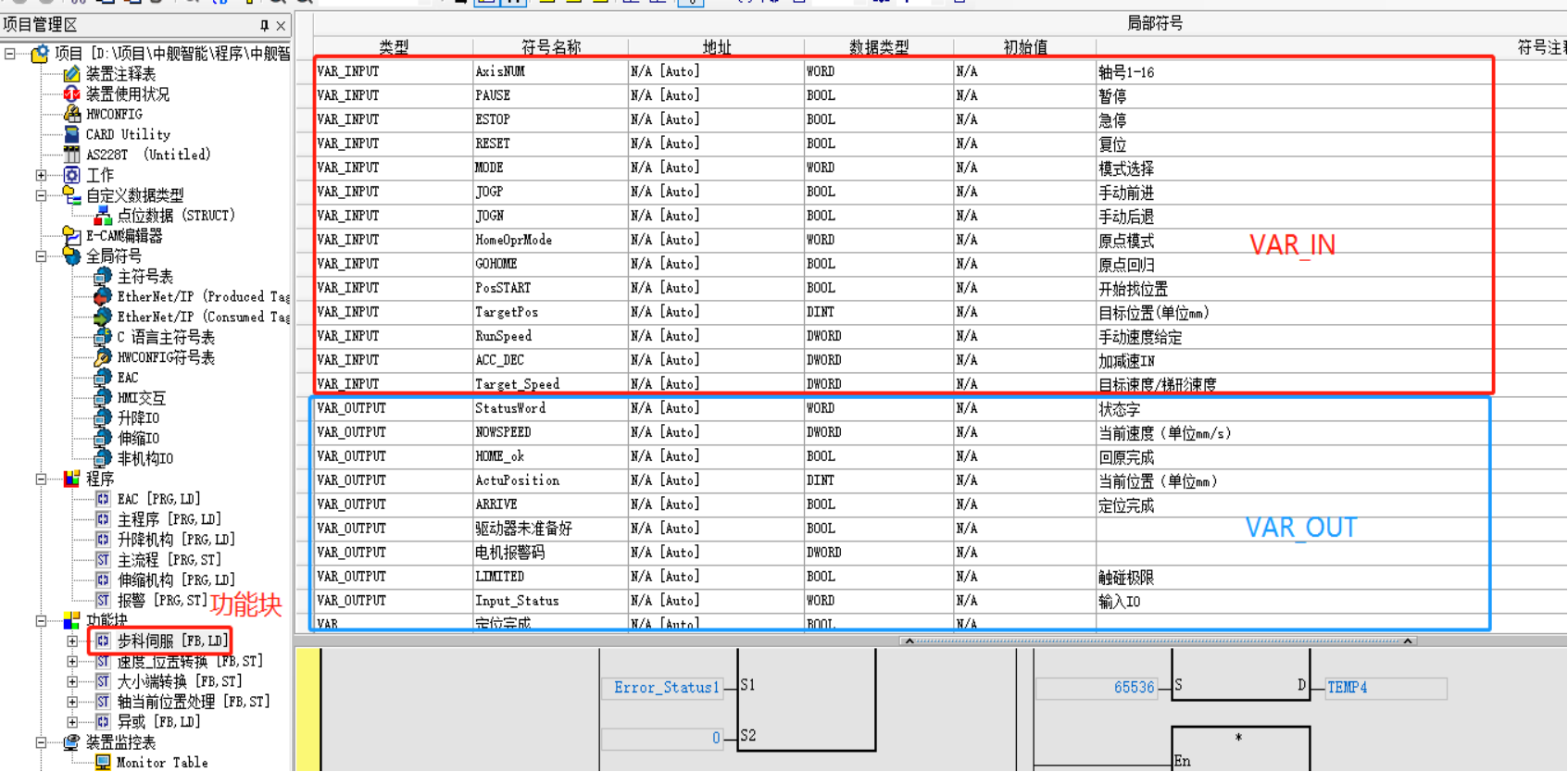
| 接口变量类型 | 名称 | 数据类型 | 备注 | 说明 | |
|---|---|---|---|---|---|
| IN | AxisNUM | WORD | 轴号1-16 | 根据CANOPEN硬件配置给入轴号 | |
| IN | PAUSE | BOOL | 暂停 | 常用功能输入 | |
| IN | ESTOP | BOOL | 急停 | ||
| IN | RESET | BOOL | 复位 | ||
| IN | JOGP | BOOL | 手动前进 | ||
| IN | JOGN | BOOL | 手动后退 | ||
| IN | GOHOME | BOOL | 原点回归 | 该接口置位时,开始执行回原作业 | |
| IN | PosSTART | BOOL | 开始找位置 | 该接口置位且给定TargetPos(目标位置)时,开始执行位置模式作业 | |
| IN | HomeOprMode | WORD | 原点模式 | 根据项目需求设定该值,具体参考《步科伺服使用手册》 | |
| IN | MODE | WORD | 当前系统模式 | 1:手动模式 2:绝对定位模式 4:相对定位模式 | |
| IN | TargetPos | DINT | 目标位置 | 以伺服驱动调试软件中的索引(6063 00)实际位置为设定标准 | 输入前可搭配功能块“速度_位置转换” 将数值转换后使用 |
| IN | RunSpeed | DWORD | 手动速度给定 | 以伺服驱动调试软件中的索引(60FF 00)目标速度为设定标准 | |
| IN | ACC_DEC | DWORD | 加减速给定 | 以伺服驱动调试软件中的索引(6083-84 00)梯形加/减速为设定标准 | |
| IN | Target_Speed | DWORD | 位置模式速度 | 以伺服驱动调试软件中的索引(6081 00)梯形速度为设定标准 | |
| OUT | Input_Status | WORD | 接入伺服驱动器IO状态 | 读取伺服IO状态/系统状态 | 具体信息参考说明书 |
| OUT | StatusWord | WORD | 状态字 | ||
| OUT | NOWSPEED | DWORD | 当前速度 | 当前伺服状态,输出值建议由功能块“速度_位置转换”进行转换 | |
| OUT | ActuPosition | DINT | 当前位置 | ||
| OUT | HOME_ok | BOOL | 回原完成 | 动作完成时,该接口置位输出 | |
| OUT | ARRIVE | BOOL | 定位完成 | ||
| OUT | 驱动器未准备好 | BOOL | 当伺服未在空闲状态或抱闸未打开,该接口置位输出 | ||
| OUT | LIMITED | BOOL | 触碰极限 | 机构触碰到极限开关时,该接口置位输出 | |
| OUT | 电机报警码 | DWORD | 该报警码以轴编号+报警码的形式表现 格式为16进制000XYYYY(X代表轴编号,YYYY代表伺服输出报警码) |
三、附件

若有收获,就点个赞吧
0 人点赞
