版本记录
| 版本号 | 更新内容 | 更新人 | 更新时间 |
|---|---|---|---|
| V1.0 | 初创 | 杨玉刚 | 2022/03/20 |
一、前言
随着公司市场业务量不断扩张,关于搭载机械臂的项目越来越多且搭载的机械臂品牌不一,大部分项目都需要进行定制开发,从而导致不管是设计端及业务端,都需要进行非标定制设计,占用公司资源的情况。
本方案从三个角度为出发点:
1、从设计角度上,迫切需要一个标准方案来涵盖当前的机械臂选型设计和定制化业务需求,该方案集成大部分的业务需求,对设计人员进行针对性设计
2、从生产角度上,采用公司标准车体生产的方式,将机械臂或上层机构和底盘剥离,底盘与机械臂采用开放接口的方式进行搭建。最终目的为出具适配大部分机械臂的标准底盘以及涵盖当前公司在用机械臂品牌的安装指导
3、从业务角度上,出具一套由点到面的选型方案,根据业务需求来自行搭配场景,实现不同业务的切换
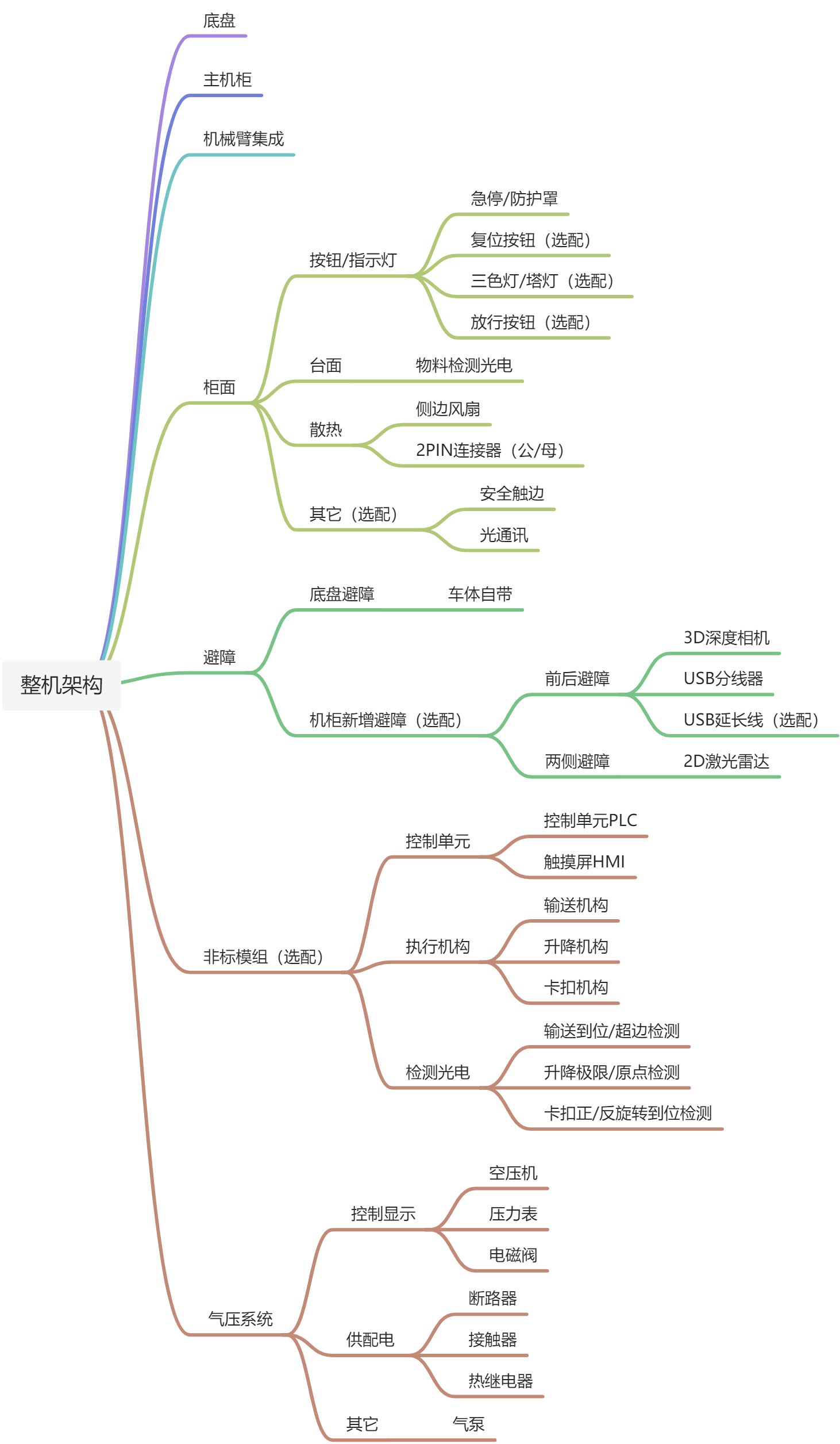
二、整体方案
1、机械臂方案平台
三、方案阐述
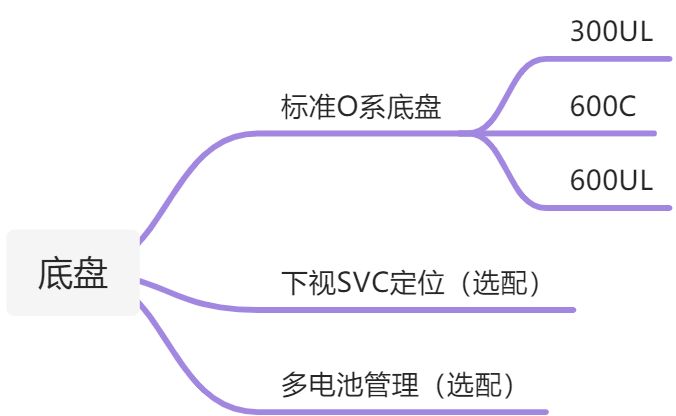
3.1 底盘模块
3.1.1 底盘拓扑图
3.1.2 物料清单
| 物料编码 | 名称 | 规格 | 数量 | 备注 | |
|---|---|---|---|---|---|
| 底盘选择 | 300UL 600C 600UL |
1 | |||
| 下视SVC方案 | 视觉相机(上视一体式) | 1 | |||
| USB数据线 | 1 | ||||
| 胶壳插头 | 1 | ||||
| 胶壳公针 | 3 | ||||
| 双电池方案 | 电池并联单元 | 1 | |||
| 磷酸铁锂电池 | 无 | ||||
| 胶壳插头 | 2 | ||||
| 胶壳插座 | 2 | ||||
| 胶壳母针 | 8 | ||||
| 胶壳公针 | 8 | ||||
| 胶壳插头 | 2 | ||||
| 胶壳插座 | 2 | ||||
| 胶壳母针 | 6 | ||||
| 胶壳公针 | 6 |
3.1.3 子模块阐述
底盘选型
根据项目需求,对整机底盘进行选型,选型依据为现场通道长宽高限制、整机成本考虑
注意:底盘选型由售前方案及结构方主导
下视SVC(选配件)
如现场AGV到达站点需要高精度(±5mm)控制,则选择增加下视SVC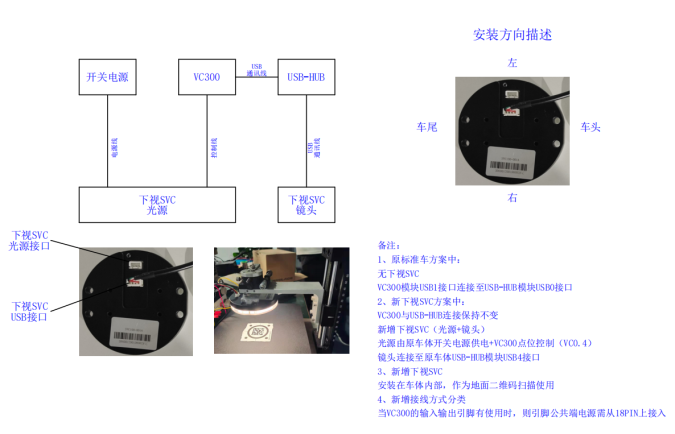
多电池方案(选配件)
从数据统计,AGV不增加电池搭载复合机械臂,持续工作续航为2~3小时,正常工作(包含中途休息时间)续航为3~5小时。当客户对AGV提出高续航需求(8小时及以上)时,则需要增加多电池及管理模块。
复合机器人一般情况均搭载双电池,以保障续航要求
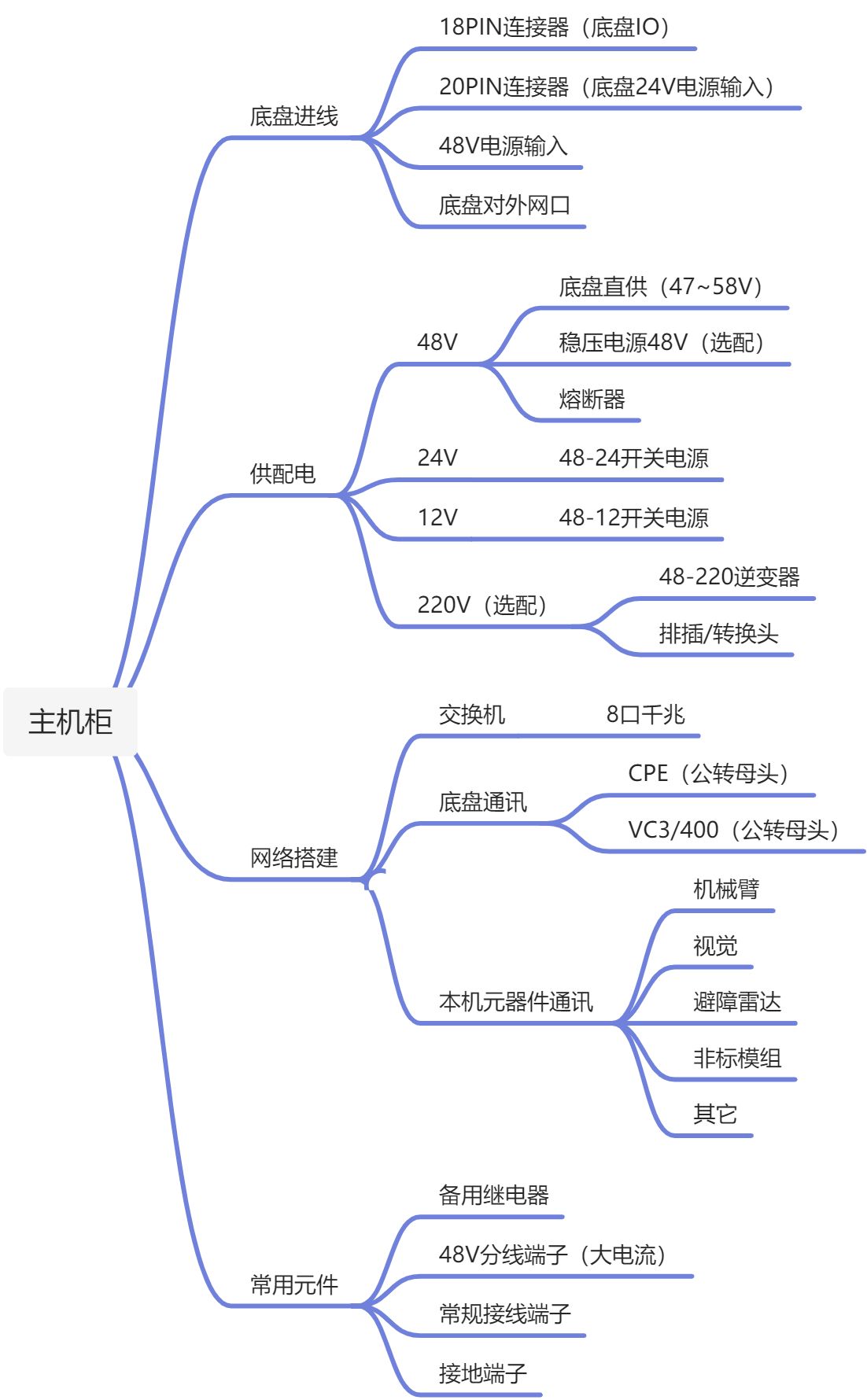
3.2 主机柜模块
3.2.1 机柜拓扑图
3.2.2 物料清单
| 物料编码 | 名称 | 规格 | 数量 | 备注 | |
|---|---|---|---|---|---|
| 底盘进线 | 航空插头 | 1 | |||
| 压接外壳公头 | 1 | ||||
| 压接外壳母针 | 20 | ||||
| 压接外壳公头 | 1 | ||||
| RJ45网口 | 1 | ||||
| 供配电系统 | 圆筒型帽熔断器 | 1 | |||
| 圆筒型帽熔断器底座 | 1 | ||||
| 开关电源 | 1 | ||||
| 开关电源 | 1 | ||||
| 逆变器 | 1 | ||||
| 德标转换器插座 | 1 | ||||
| 工业排插 排插 |
1 | ||||
| 网口改造方案 | 交换机 | 1 | |||
| 成品网线 | 1 | ||||
| 成品网线延长线 | 3 | ||||
| 成品网线 | 2 | ||||
| 常用元件 | 接线端子 | 4 | |||
| 接线端子 | 1 | ||||
| 接线端子联络件 | 4 | ||||
| 接线端子 | 30 | ||||
| 接线端子联络件 | 2 | ||||
| 接线端子固定件 | 6 | ||||
| 接线端子端板 | 10 | ||||
| 接线端子端板 | 10 | ||||
| 片式继电器 | 10 |
3.2.3 子模块阐述
底盘进线
4PIN对外电源口:
底盘向机柜通过该口进行供电,采用航插连接
其中A1 A2为非受控电源(车体上电即输出),B1 B2为受控电源(受急停等安全条件限制)
注意:供电电压为47V~58V宽压,功率根据底盘型号分为1500W、2000W
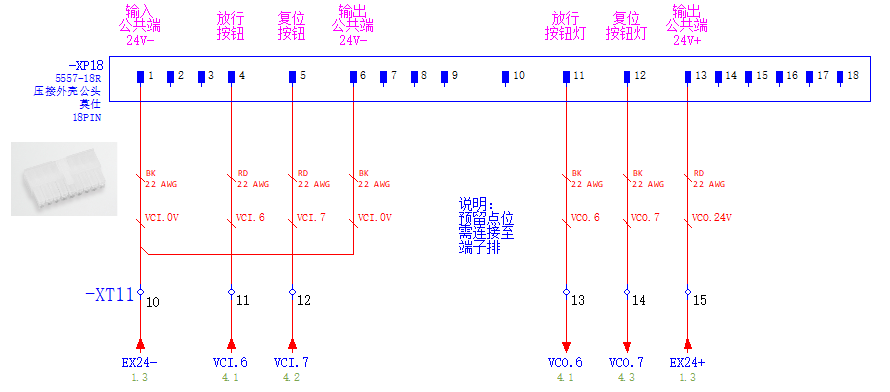
18PIN/20PIN对外信号口:
1、提供底盘受控24V(受急停等安全条件限制)及不受控24V(车体上电即输出)
2、将底盘VC300的4组IO引出至18PIN,主控柜可通过对相应PIN脚接线来实现IO交互
3、提供底盘急停引脚来外接安全装置(急停、安全触边等),通过该引脚,外部急停可实现对底盘安全控制
4、提供对外PCAN引脚,可扩展PCAN通讯
注意:当前网口改造方案已将底盘及主控柜网络打通,该口暂不使用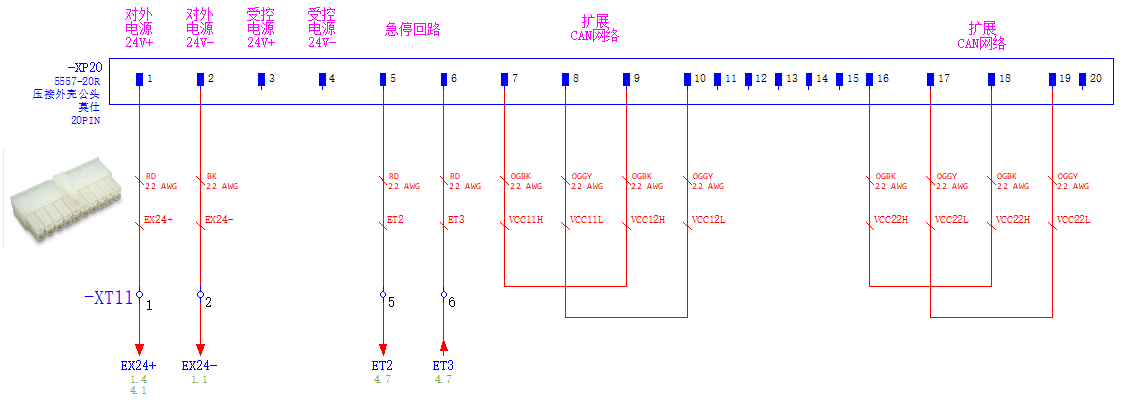
对外网口:
通过该网口可实现外部设备接入车体局域网,方便调试及TCP扩展
注意:当前网口改造方案已将底盘及主控柜网络打通,该口暂不使用
供配电系统/常用元件
48V:
此电源为机柜电源源头
获取分流方式为由底盘航插(WS24J4TQ)接入至大电流接线端子(JUT1-6-GY-M101)
再由接线端子分流至机械臂/24V/12V开关电源/220V逆变器
24V/12V:
通过48V-24/48-12开关电源转换后获取
再分流至各系统/机构
220V(选配):
该电源主要适配交流输入机械臂(220V输入)或者空压系统
其余情况不采用
注意:部分空压系统选型会采用其它电压(24V/48V等),设计时需注意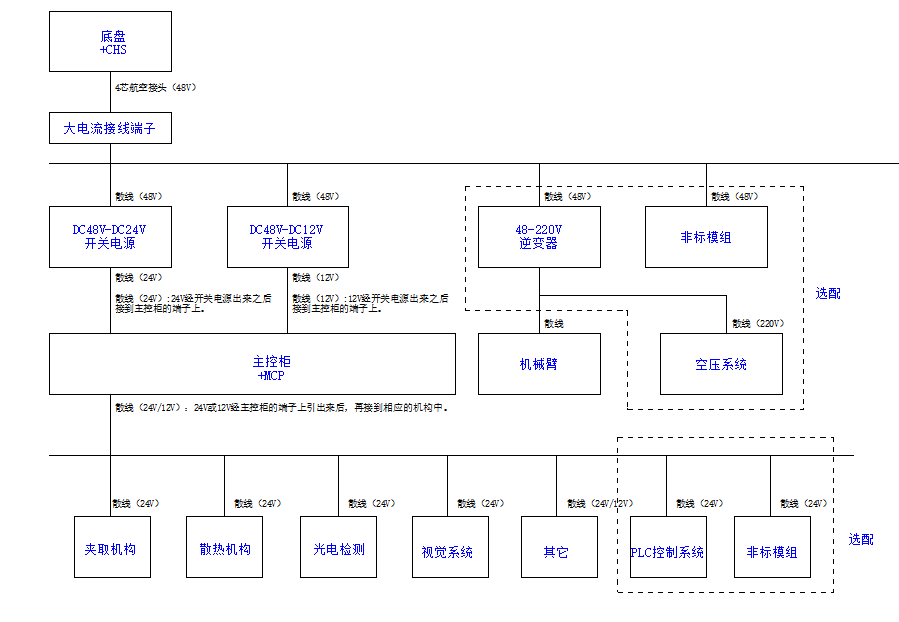
网口改造方案
整个方案分为两个部分
1、针对底盘进行改造:
ETH1~2口连入CPE及VC300
连接方式为新增公转母网线接入CPE及VC300原配置网线
2、上方元器件网络回路
ETH3~8连入机械臂、视觉等设备
注意:ETH4、5、6为固定口,只接入机械臂、视觉、对外网口。其余口根据项目实际需求来进行选配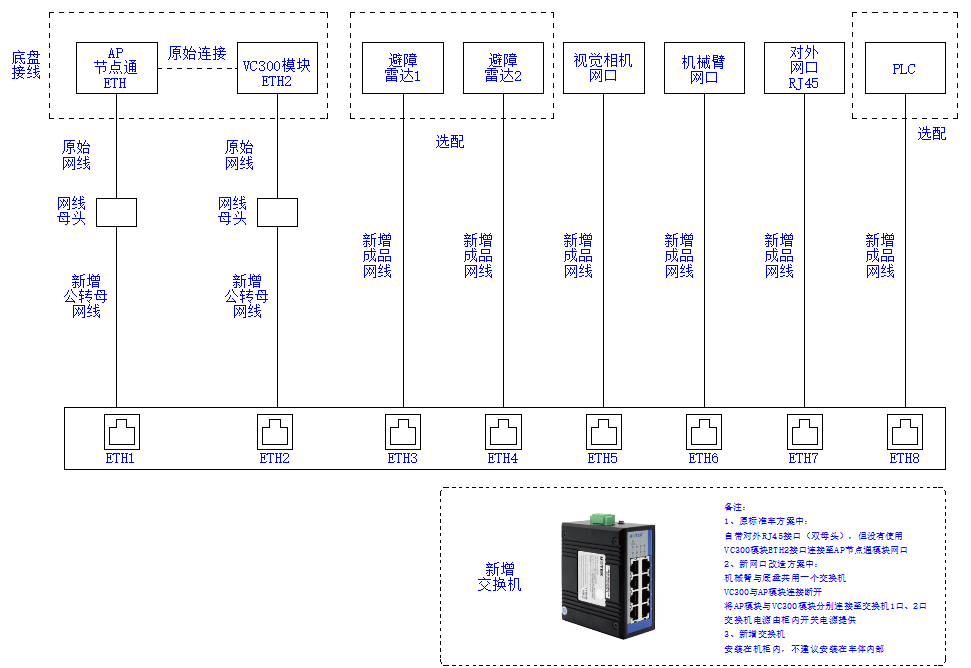
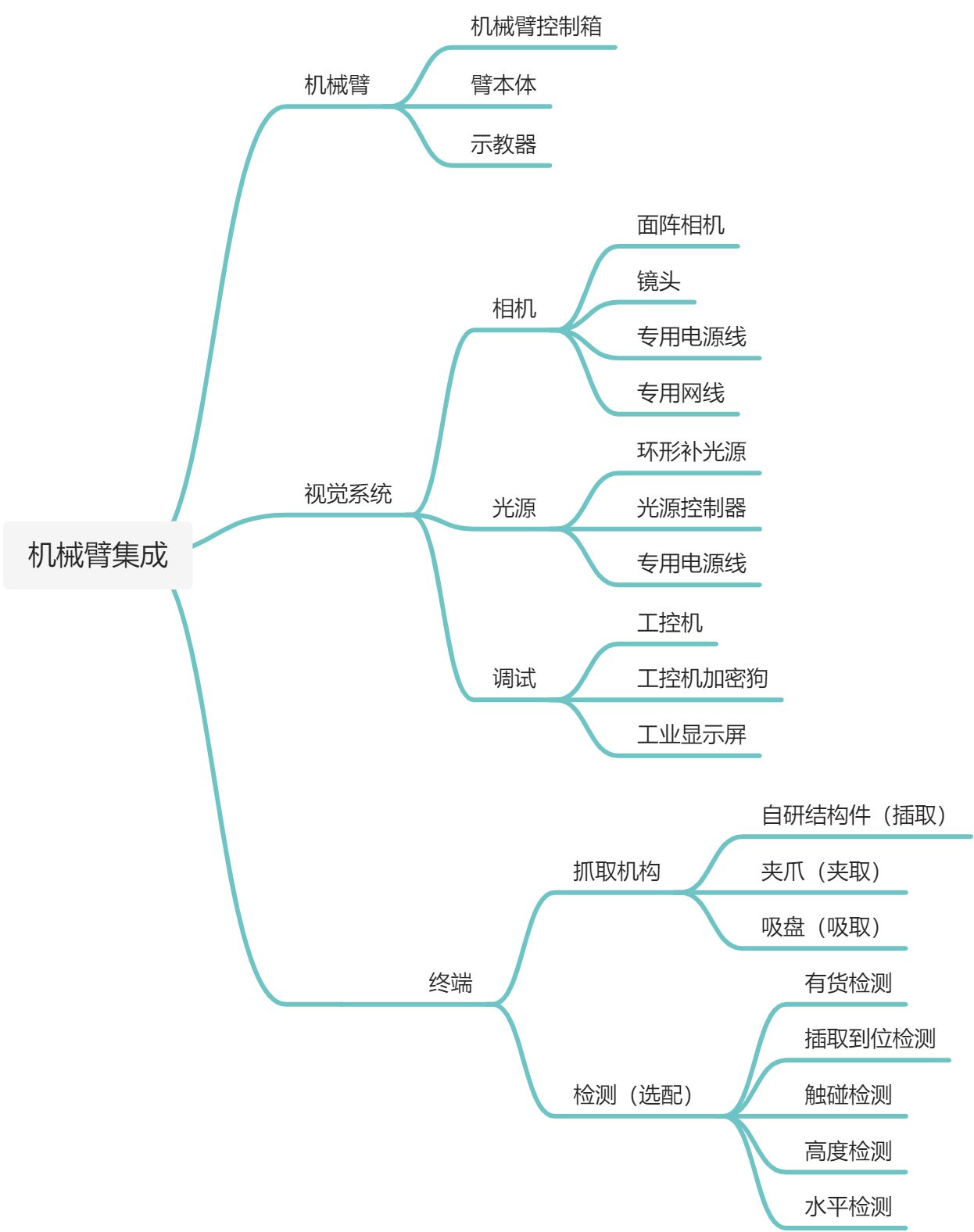
3.3 机械臂集成模块
3.3.1 机械臂集成拓扑图
3.3.2 物料清单
| 物料编码 | 名称 | 规格 | 数量 | 备注 | |
|---|---|---|---|---|---|
| 机械臂本体 | 机械臂本体 | 1 | |||
| 无 | 机械臂示教器 | 1 | |||
| 视觉系统 | 工业面阵相机 | 1 | |||
| 相机镜头 | 1 | ||||
| 相机电源线 | 1 | ||||
| 相机网线 | 1 | ||||
| 相机光源 | 1 | ||||
| 片式继电器 | 1 | ||||
| 相机光源延长线 | 1 | ||||
| 工控机 | 1 | ||||
| 相机工控机加密狗 | 1 | ||||
| 工业显示器 | 1 | ||||
| 物料夹取机构 | 夹爪 | 1 | |||
| 插爪 | 1 | ||||
| 吸盘 | 1 | ||||
| 终端有货检测 | 漫反射型光电开关 | 1 | |||
| 超声波传感器 | 1 | ||||
| 动作安全检测 | 槽型光电 | 1 | |||
| 触碰传感器 | 2 | ||||
| 高度检测 | 激光测距模组 | 1 | |||
| 水平倾角检测 | 倾角传感器 | 1 | |||
| 串口服务器 | 1 |
3.3.3 子模块阐述
机械臂本体
机械臂整体共分为控制箱、示教器(控制棒)、机械臂本体
其中控制箱及机械臂本体共用一个物料号,即下单机械臂则能获得控制箱以及机械臂
示教器(控制棒)一般情况下包含在控制箱内,但部分品牌不包含示教器(如达明、傲博)
控制箱示例
示教器(控制棒)示例

机械臂本体示例
控制箱供配电说明
在用机械臂供电共分为两种供电方式
1、110-240V交流供电
由三品插座为供电口,机柜内需提供逆变器(48V-220V)及工业排插等硬件实现供电
2、48V直流供电
供电口为1组大电流压接端子,将48V+ 48V-接入对应端子内实现供电
下图以达明机械臂两种供电方式为示例
220V供电示例 48V供电示例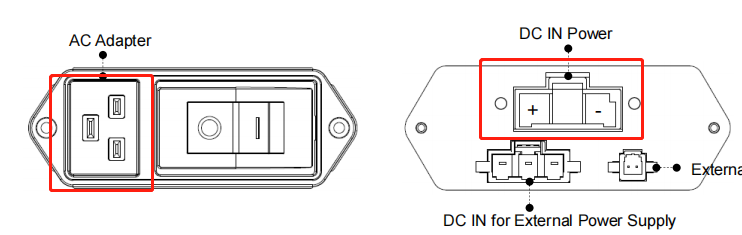
3、关键注意事项1)通讯EAC2)夹爪设计3)视觉设计4)定制台面5)远程开关机6)空压机三、硬件实现方案1、布局图2、拓扑图0)整体连接关系1)供配电2)网络3)信号四、关键元器件拆解五、资料使用说明图纸远程开关机程序附件五、设计文档1、标准图纸该图纸涵盖所有机械臂类型,集成各组件接口\192.168.83.224\共享盘\21 研发部\21 研发组\04 硬件组\01-电气\11-标准解决方案\101 机械臂解决方案\01 设计表2、电气设计表表格内部集成4份电气设计表,分别对应当前在用品牌机械臂的电气设计表\192.168.83.224\共享盘\21 研发部\21 研发组\04 硬件组\01-电气\11-标准解决方案\101 机械臂解决方案\11 图纸

若有收获,就点个赞吧
0 人点赞
