一、T型曲线介绍
在控制系统的速度控制中,为了让速度更加平滑,可以引入T型速度曲线或S型速度曲线,S型曲线一般在伺服系统上用于高精度控制,对位置的精确性要求比较高。而T曲线对精度并无太高要求,它适用于变频器,通过距离计算来对变频器的速度进行实时给定,是一种时间最优的曲线。相比之下,在装载设备的速度控制上,T型曲线更为适合。
二、T型曲线速度分析
在整体系统高速启动,制动的状态下,可以提高整体系统的性能。每当系统完成一个动作的时候,总共包括三个过程,匀加速,匀速,匀减速,具体如下图所示;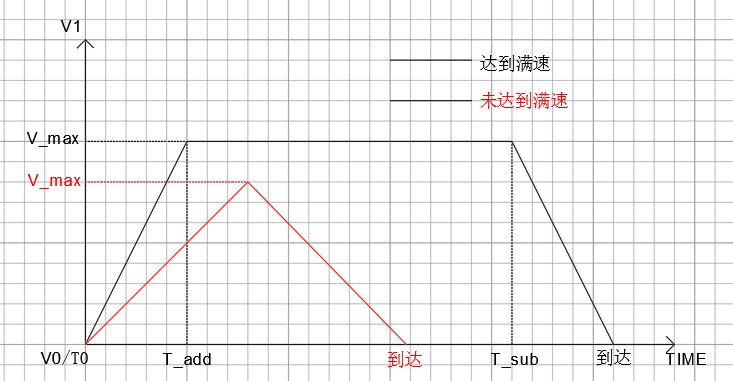
2.1 最大速度情况分析
根据V是否到达V_max,这里通常要分为两种情况来讨论;
第一种:速度到达V_max,最终速度曲线为梯形;
第二种:速度没有到达V_max,最终速度曲线为三角形;
2.2 参数分析
在判断速度是否到达V_max之前,我们要先确认几个参数
1、加减速时间 T_add、T_sub(取变频器设定的加减速时间)
一般情况下,变频器设置的加减速时间是为0至50Hz额定频率的加减速时间,故如果实际运用上面选择超频,则需要计算出实际的T_add、T_sub
- 实际最大速度 V_max(取实际测量的设备最大移动速度)
- 当前位置S_now
4、实际需要行走的距离 S_move
5、当前位置与目的地的实时距离差值S_real = 绝对值(S_move - S_now);
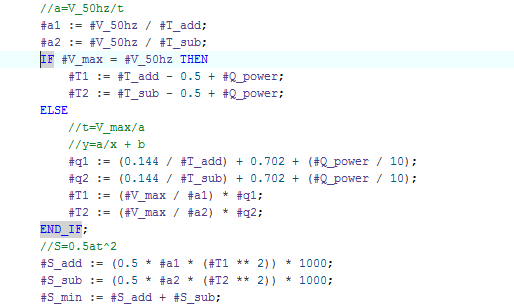
6、计算加减速度 a_add=V_max / T_add;
a_sub=V_max / T_sub;
7、计算加减速所行走的距离
S_add := (0.5 a_add (T_add 2)) 1000;
S_sub := (0.5 a_sub * (T_sub 2)) * 1000;
2.3 最大速度计算
2.3.1 情况一:速度到达V_max
速度到达V_max,即S_move >= S_add + S_sub
这种情况下,我们只需要考虑减速所需要行走的距离即可,当S_real<=S_sub时,给定变频器速度0但是继续给定使能,使电机斜坡停车
达到的效果为当减速距离跑完的那一刻的位置正好为到达的目的地位置,误差不超过±3mm2.3.2 情况二:速度未到达V_max
速度未到达V_max,即S_move < S_add + S_sub
这种情况下,我们需要计算能到达的速度V1,并根据此短距离的最大速度V1 计算出减速所需行走的距离
计算公式
S_move= S_add + S_sub
V1=0.5 a_add T_add=0.5 a_sub T_sub
S_add := (0.5 a_add (T_add 2)) 1000;
S_sub := (0.5 a_sub * (T_sub 2)) * 1000;
2.4 减速距离计算
而计算该速度和减速距离也分两种情况
加减速时间设置为一致
加减速时间设置不一致
2.4.1 情况一:加减速设置时间一致
当加减速时间设置为一致时,代表 S_add = S_sub,这样我们就可以求出V1的值以及减速距离
V1 = (S_move / 2) / #S_add * #V_max;
S_sub=S_move / 2;
2.4.2 情况二:加减速设置时间不一致
当加减速时间设置不一致时,则计算不出具体的V1,所以我们也可以按情况1来进行计算,计算后的结果实际也可以满足需要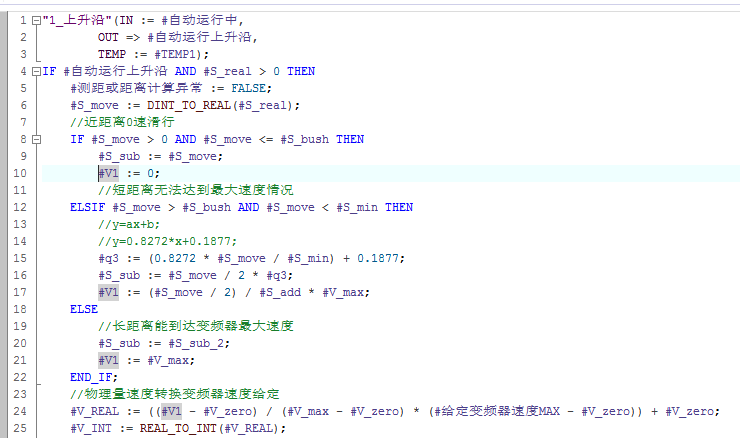
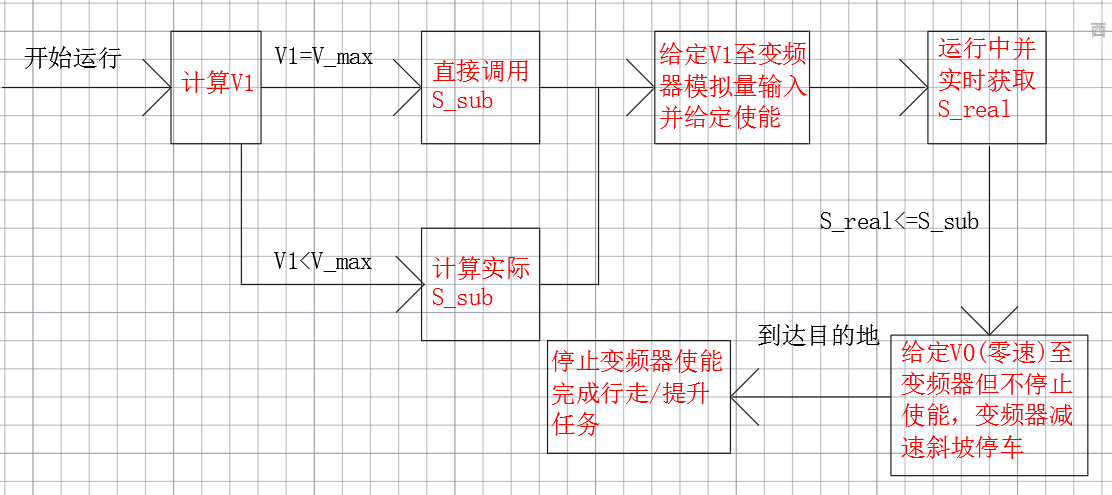
在每次行走/提升启动上升沿时,通过行走距离S_move计算所需要的速度及减速距离,将计算好的速度值转换为变频器模拟量输入值
具体逻辑如下图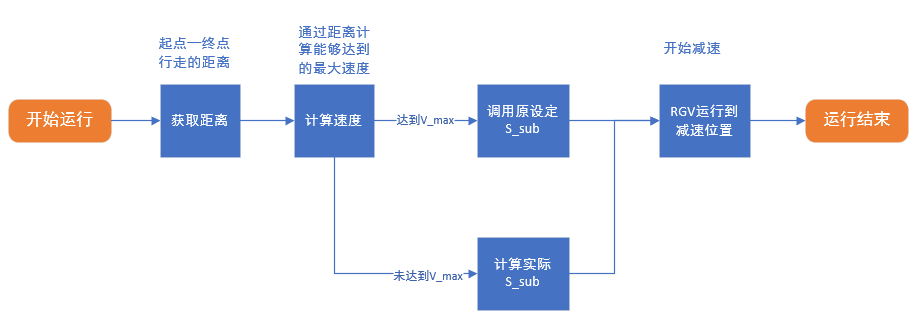
三、实际应用
以上为理论情况下的分析,但是在实际运用上,我们还需要考虑四点
3.1 考虑机械惯性
负载在运行过程中都存在机械惯性,负载越大则惯性越大,所以我们在重载情况下还需要加一段惯性距离S_iner,那么S_move= 实际走的距离 + S_iner。这个距离的设定根据现场实际情况进行调整,一般情况为5公分。
3.2 考虑扭矩及负载
如果电机的扭矩过小,或者说因为负载过大导致的变频器启动时间长以及提速爬坡时间长都会导致实际的T_add大于理论算出的T_add(在电机超过30KW时会出现该情况),最终导致的结果为设备在运行S_add完后依旧达不到V_max,这一点在短距离情况下尤为突出,所以我们在实际运用中可以考虑在程序内部添加速度补偿或者只在短距离的情况下采用三段速。
3.3 考虑数据传输滞后性
在实际运行中,PLC的扫描周期过长以及给定变频器模拟量的接线方式都会导致输出延时波动的情况,进而导致给定变频器模拟量时存在滞后性,最终导致的结果为运行过冲,所以我们可以再加一段距离,该距离可以合并至S_iner一同设定
3.4 考虑变频器可靠性
市面上的变频器品质差次不齐,要想设备运行轨迹顺滑,那么必须采用好的变频器,衡量标准为是否支持低频率运行(0.1—1HZ),爬坡时速度是否存在抖动,如变频器品质不好,则程序上的曲线调得再好也是徒劳。
四、结论
在工业设计上,T曲线对比S曲线硬件上更省成本,对比传统三段速控制来说运动轨迹更平滑且效率更高。总的来说,如果对实际运行精度要求不高的情况下,T曲线是相当适合的。

若有收获,就点个赞吧
0 人点赞
