一、说明
本章介绍如何通过IO脉冲的方式来进行位置模式控制,本次案例以步科绝对值编码器电机作为硬件策略<br />整体软件流程以2组位置循环测试,具体见第三章
二、硬件架构
硬件架构导图
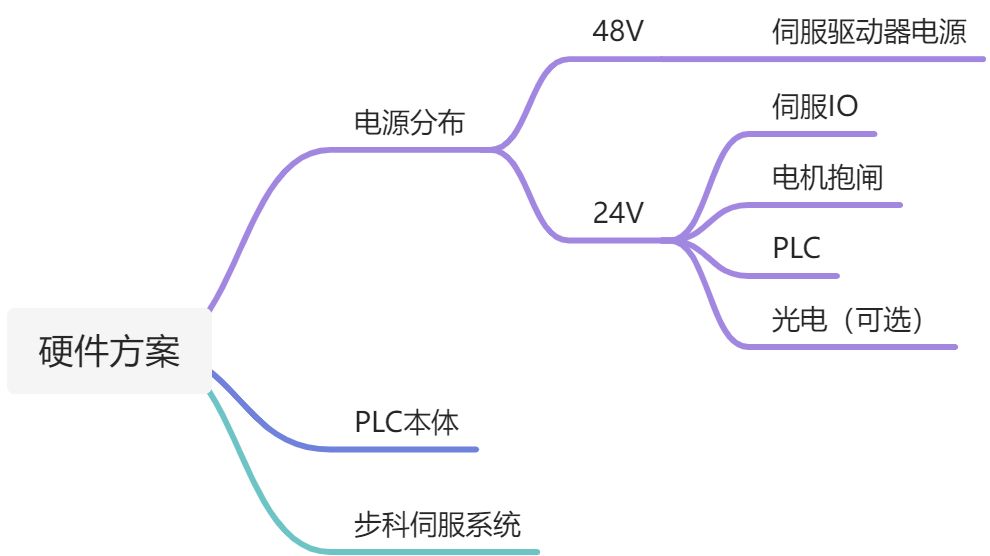
物料清单
| 物料编码 | 名称 | 规格 | 数量 | 备注 | |
|---|---|---|---|---|---|
| 电源 | 电池本体 | 1 | 48V电源 | ||
| 48V-24V开关电源 | SD150C-24 | 1 | |||
| 直流断路器空气开关 | DZ47SZ 1P 20A | 控制电池供电通断 | |||
| PLC | PLC | 台达PLCDVP12SE11R | 1 | ||
| 五类网线 | 1 | 调试使用 | |||
| 伺服系统 | 400W伺服驱动器 | FD124S-LB-003 | 1 | 脉冲控制型 | |
| 伺服电机动力线 | MOT-008-01-KL-D | 1 | 延长线/可选 | ||
| 400W绝对值编码器编码器线延长线 | ENCDG-01-GU | 1 | 延长线/可选 | ||
| 绝对值编码器转换线 | ENCHG-(4)-GU-BT | 1 | |||
| 步科 750W绝对值抱闸 抱闸线 | BRA-01-KL | 1 | |||
| 其它 | PT 2,5直通式接线端子 | PT 2,5-QUATTRO-3209578 | 2 | 普通端子 | |
| FBS 2-5插拔桥接件 | FBS 2-5-3030161 | 2 | |||
| 端板 D-ST 2.5 | D-ST 2.5-QUATTRO-3030514 | 2 |
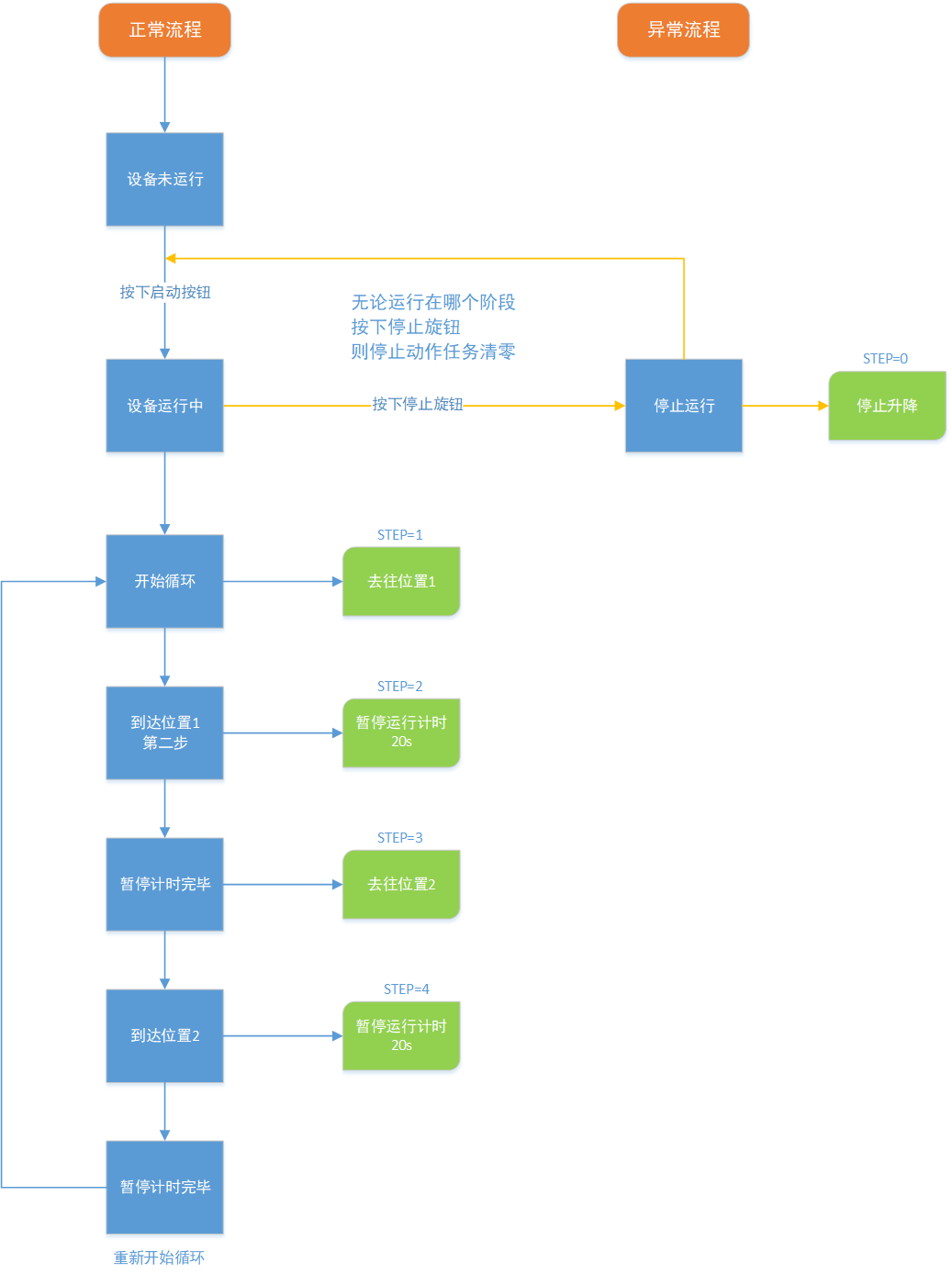
三、软件流程
先置位使能(Y0)
延长20ms置位位置索引(Y1或Y2)
收到到达位置(X1)信号并保持50ms
复位使能(Y0)及位置索引(Y1或Y2)信号
…
再次循环
IO映射表
| PLC_IO | 伺服DIN | |
|---|---|---|
| 使能 | Y0 | DIN1 |
| 位置索引0 | Y1 | DIN2 |
| 位置索引1 | Y2 | DIN3 |
| 到达位置 | X1 | OUT1 |
| 启动旋钮 | X2 | |
| 停止旋钮 | X3 |
流程图
四、调试步骤
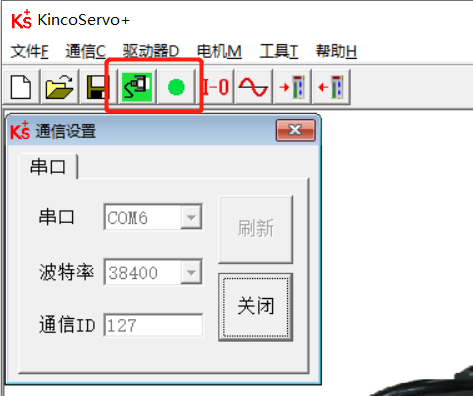
调试前准备
插入调试线—打开通信设置—点击刷新—等待出现串口信息—点击打开—调试口显示绿色代表通信正常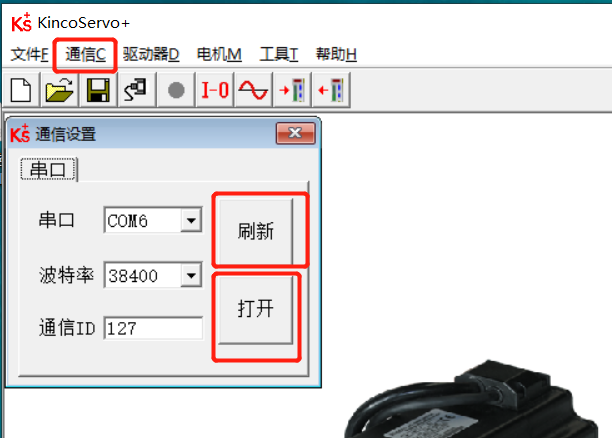
基本参数设置
点击菜单栏电机M—选择电机配置—设置电机型号(该型号须与电机铭牌型号一致)
点击菜单栏驱动器D—选择基本操作—设置通讯编码器数据复1—将值设置为10—等待1S—该值跳转为17或其它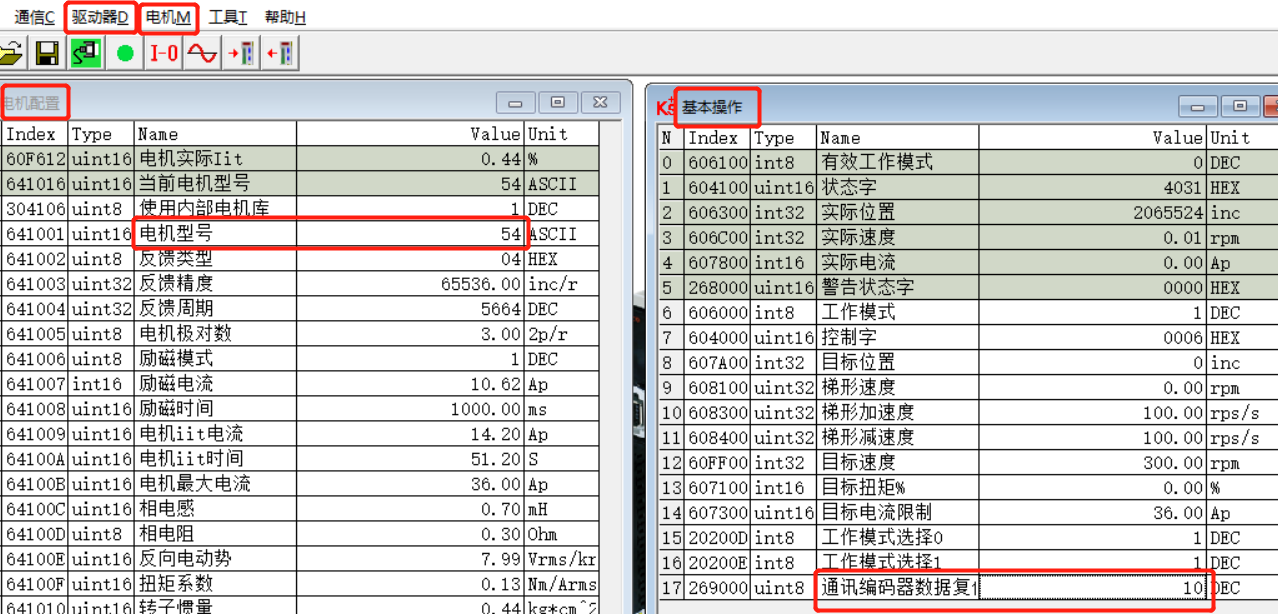
IO设置
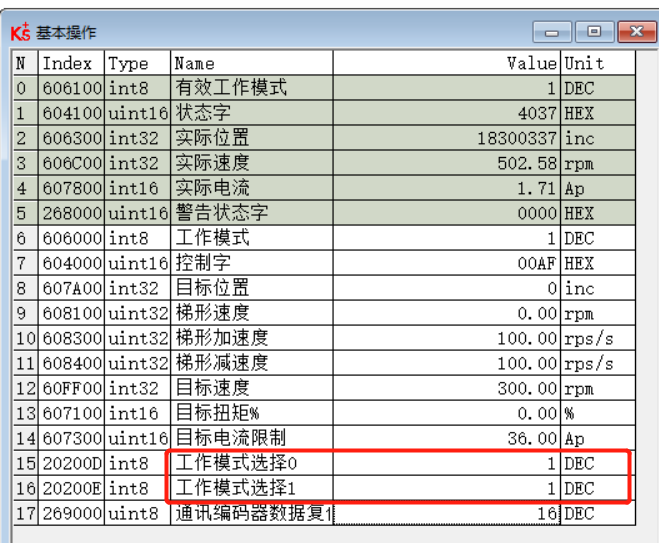
右侧 工作模式选择0/1 为 配套 DIN1的工作模式控制,当DIN1置位时,伺服工作模式切换为1(位置模式)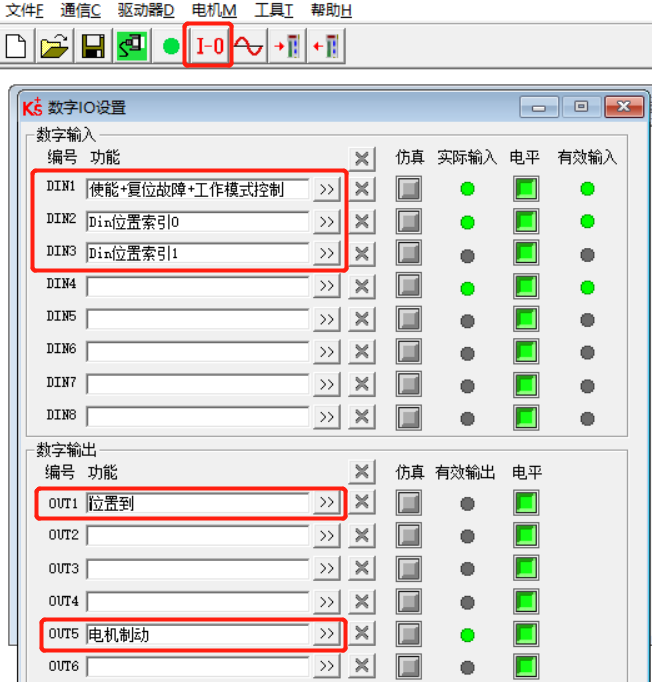
DIN位置模式设置
点击驱动器D—选择控制模式—选择DIN位置模式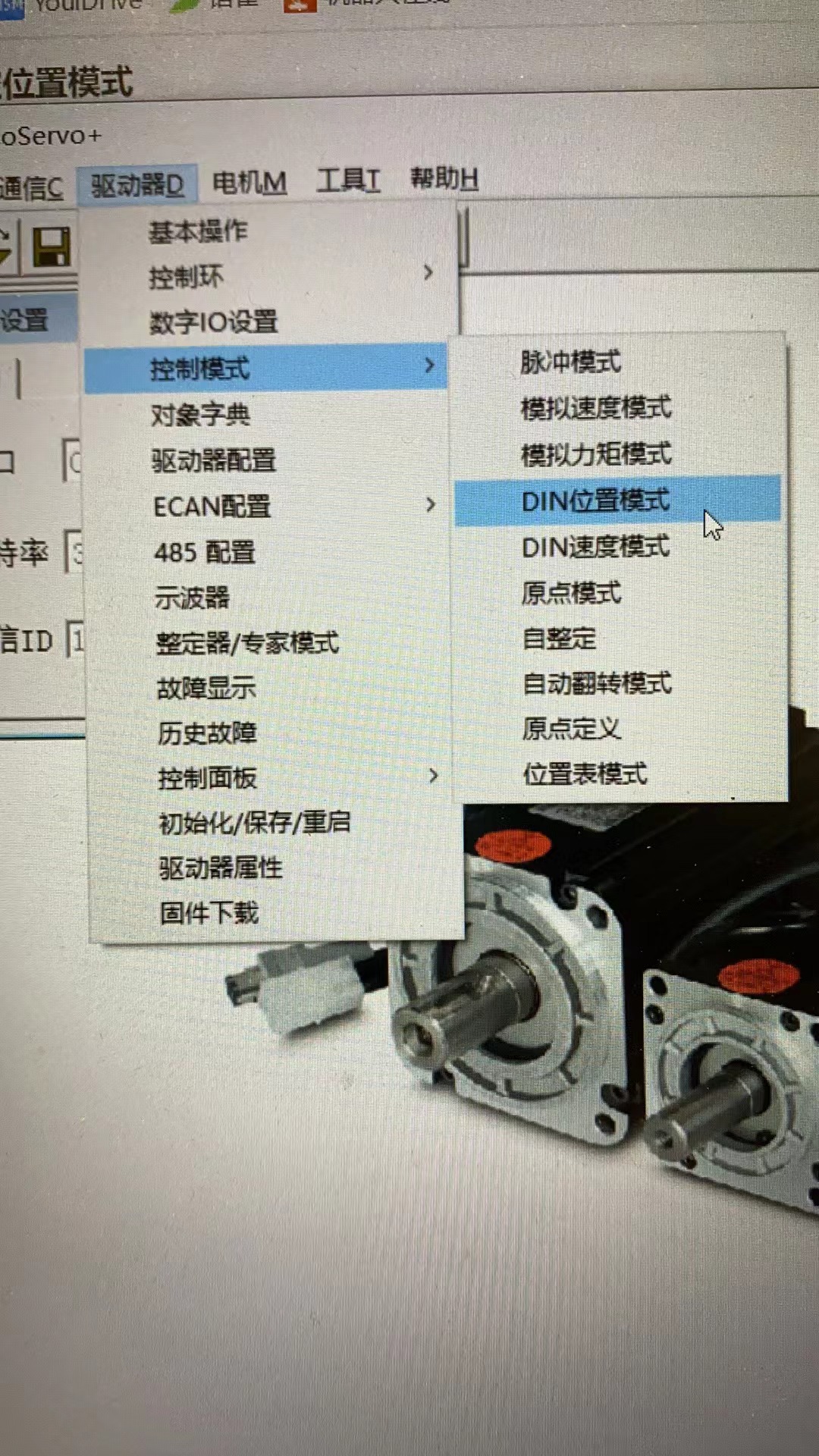
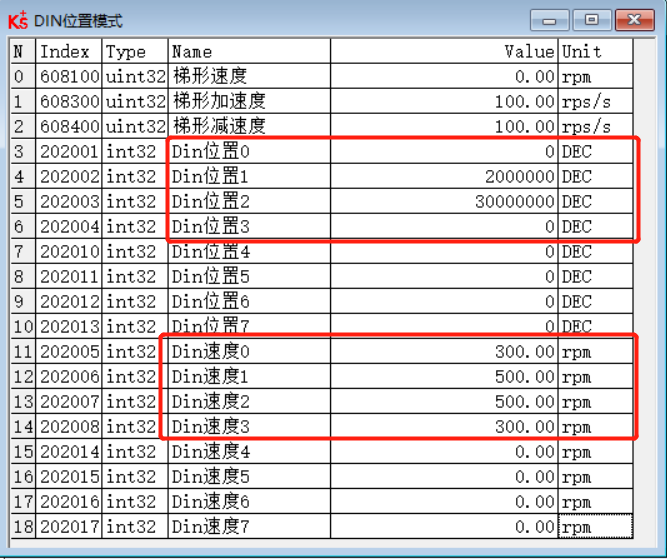
DIN位置模式详细说明
Din位置0~7为多段位置设定值,脉冲激活位置索引后,电机执行行走任务,行走至对应的设定位置
Din速度0~7为多段位置所对应的速度值,即执行位置行走时,电机所达到的速度
例如,我执行去往Din位置1的任务,则电机以500rpm的速度执行
注意:Din速度不需要取负值
Din位置表是以二进制组合形式来读取相关信息,例如 位置索引0 为 True 位置索引1 为 True,则读取位置3
具体对应表
| 位置索引0(Din2) | 位置索引1(Din3) | |
|---|---|---|
| Din位置0 | FALSE | FALSE |
| Din位置1 | TRUE | FALSE |
| Din位置2 | FALSE | TRUE |
| Din位置3 | TRUE | TRUE |
保存设置
点击驱动器D—选择初始化/保存/重启—等待弹出界面—点击存储控制参数及电机参数—等待2s—点击重启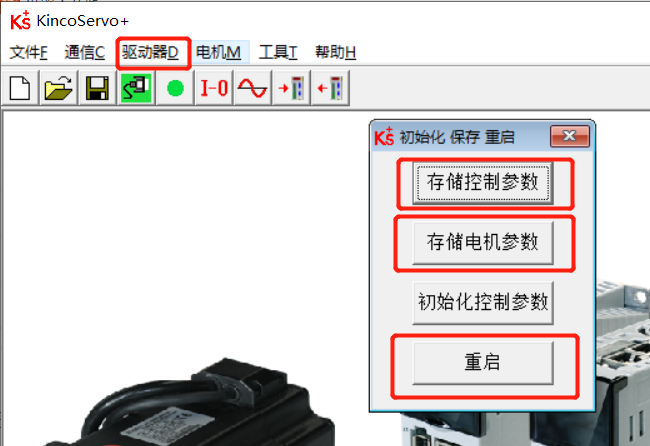
五、总结
附件
流程图
升降台DEMO流程.pdf
台达程序源文件
升降台DEMO.zip
电机参数
升降DEMO参数表.zip
电气原理图
DEMO升降台.pdf

若有收获,就点个赞吧
0 人点赞
