舵机
Servo
1. 简介
「舵机」模块带有一个舵机接口,可以驱动最多一个舵机。
生活中常见的电动舵机,由直流电机,传动齿轮,集成电路和输出转轴组成,通过调控传输到电路的编码信号,控制舵机转动输出转轴至特定的角度位置。舵机适用于那些需要角度不断变化并可以保持的控制系统,常常被用在玩具和机器人设备中。
注意*:在使用舵机时,为避免供电不足,请尽量使用「电池」模块进行供电。
2. 模块概览
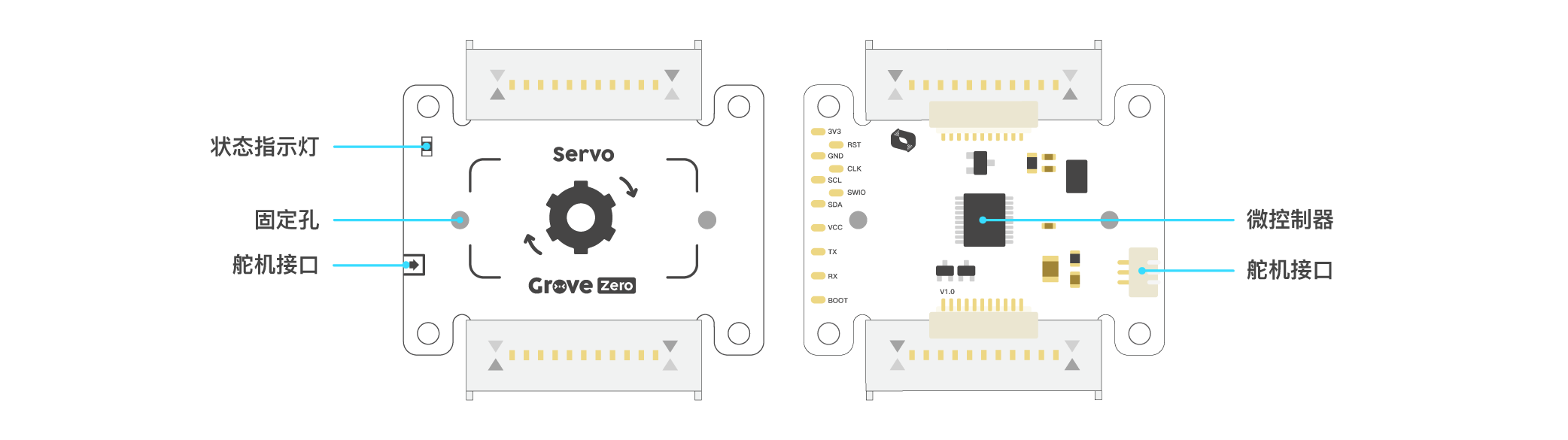
| 状态指示灯 | - 上电初始化:闪烁3下,之后模块开始工作 |
|---|---|
| 固定孔 | 可通过固定孔将舵机固定在模块表面,便于项目使用。 |
| 舵机接口 | - 连接数字舵机 |
| 微控制器 | - 按照主控模块发送的指令转动舵机至指定角度位置 - 储存预置程序,让模块可以即插即用 |
3. 装配舵机
模块表面标注了舵机装配辅助位置,可按照下图指示将舵机安装在模块表面,便于在项目中使用。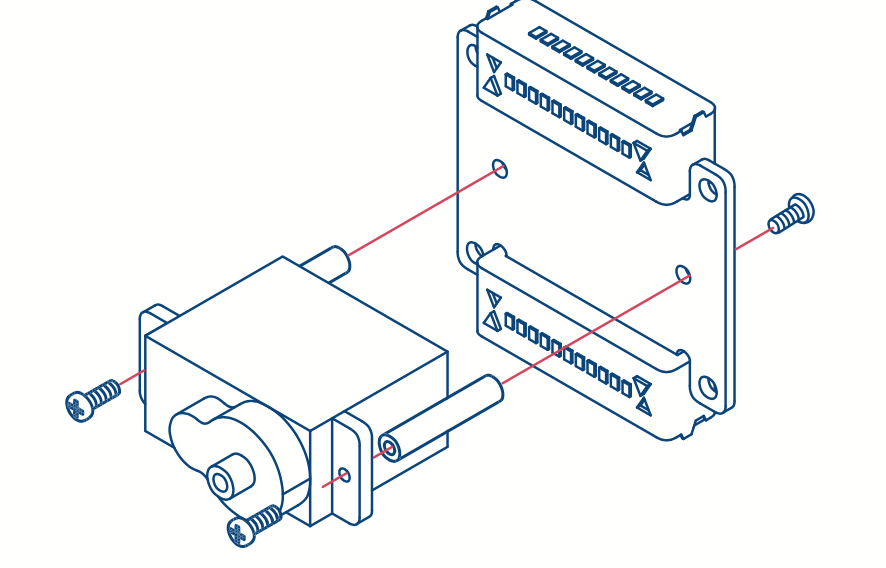
4. 技术参数
| 舵机角度 | 0 ~ 180° |
|---|---|
| 微控制器 | STM32F030F4 |
| 核心频率 | 48 MHz |
| 存储 (Flash) | 16 kB |
| 内存 (SRAM) | 4 kB |
| 供电电压 | 3.6 - 5V |
| 接口 | 2x 11 Pin 接口 (用于接11 Pin 排线) 2x 11 Pin 金手指 (用于磁性连接器) |
| 通信协议 | I2C |
| 尺寸 | 40mm 30mm (仅电路板) 40mm 42mm (安装磁性连接器) |
| 重量 | 约 4.1g (仅电路板) 约 11.2g (安装磁性连接器) 约 20.6g (装配舵机) |
5. 模块使用
关于模块使用,详见 Codecraft 的 Grove Zero 编程指南。

若有收获,就点个赞吧
0 人点赞
