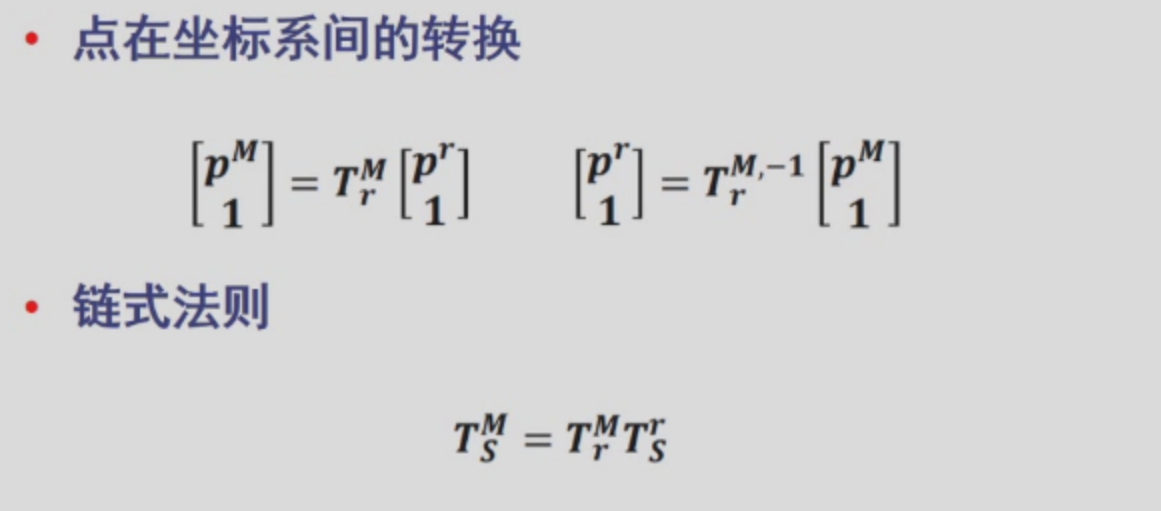
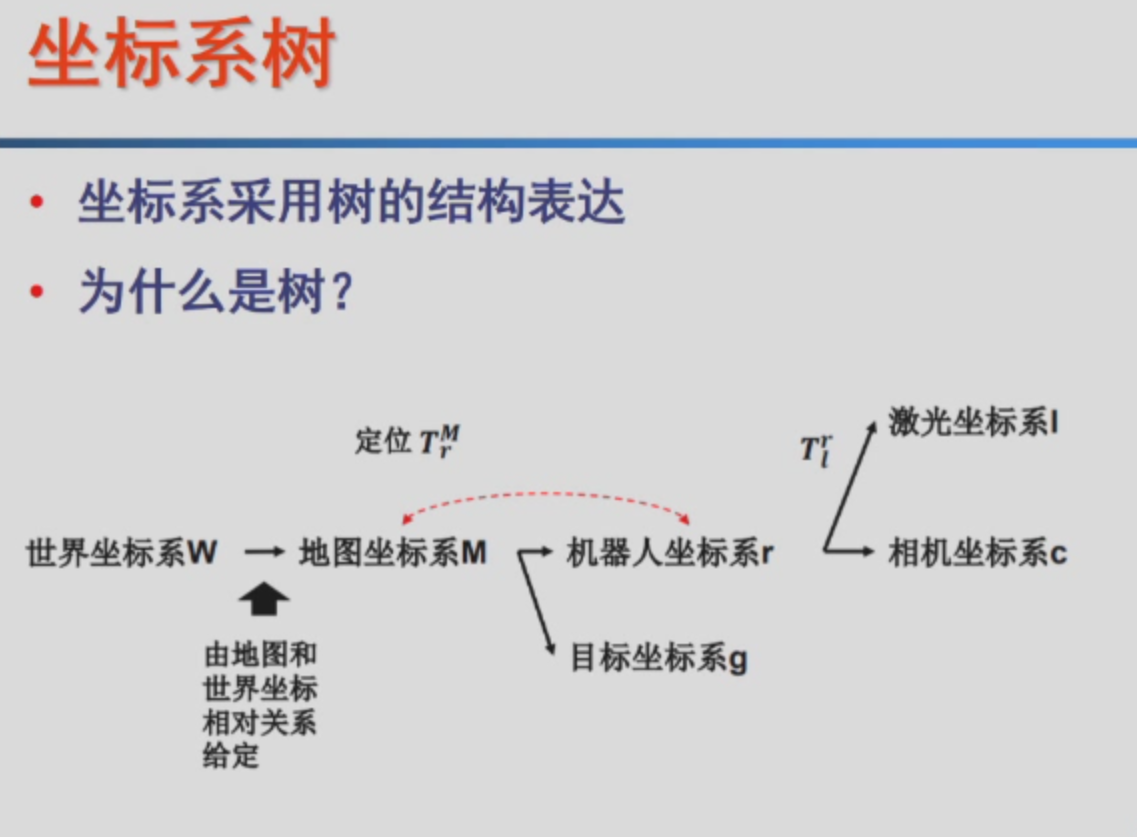
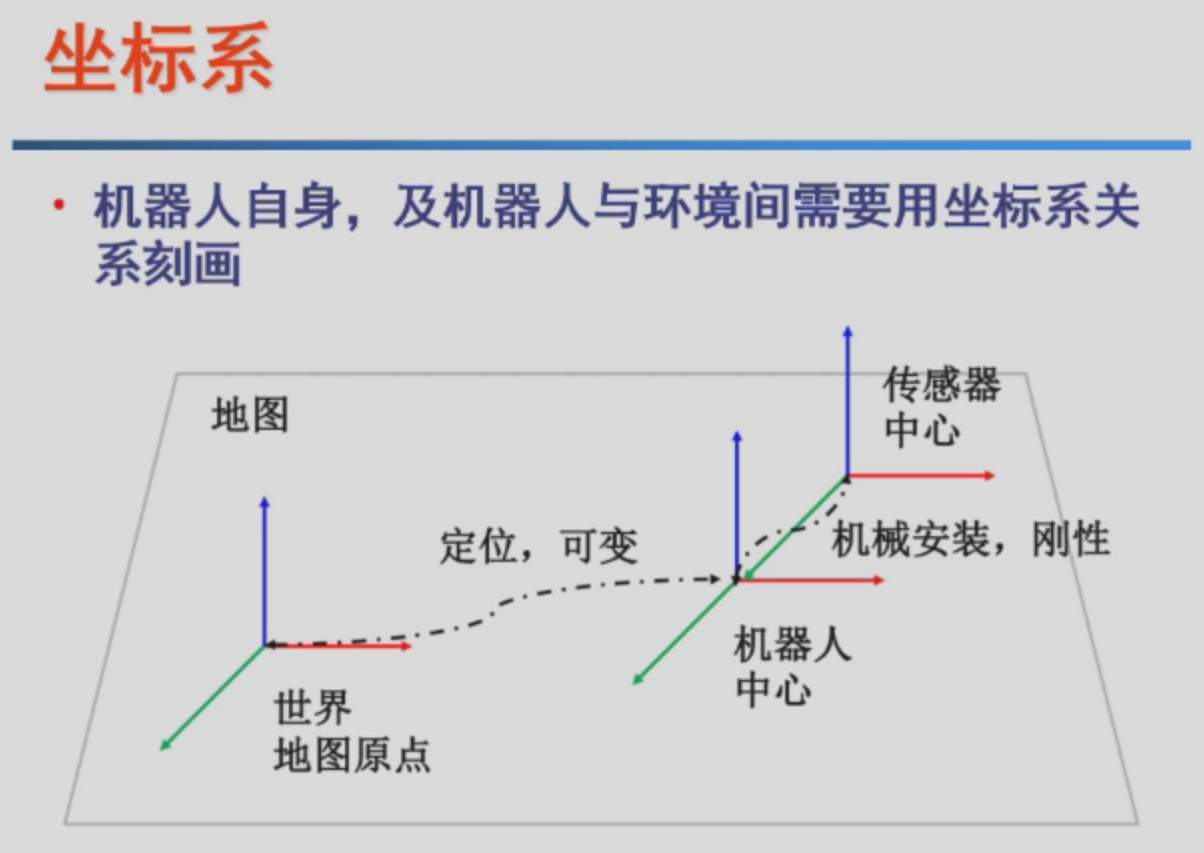
工具学习运动学整理路径规划算法A*PRMRapid Exploring Random Tree | RRTRRT* 工具学习 ROS学习整理 运动学整理M 和 r 分别代表地图和机器人 旋转矩阵的逆(转置)是地图在机器人下的旋转矩阵 位姿矩阵的逆是地图在机器人下的位姿矩阵 众多坐标系的数据结构是树,ROS 中提供的 tf 完成了这个功能 路径规划算法 A* PRM Rapid Exploring Random Tree | RRT RRT*
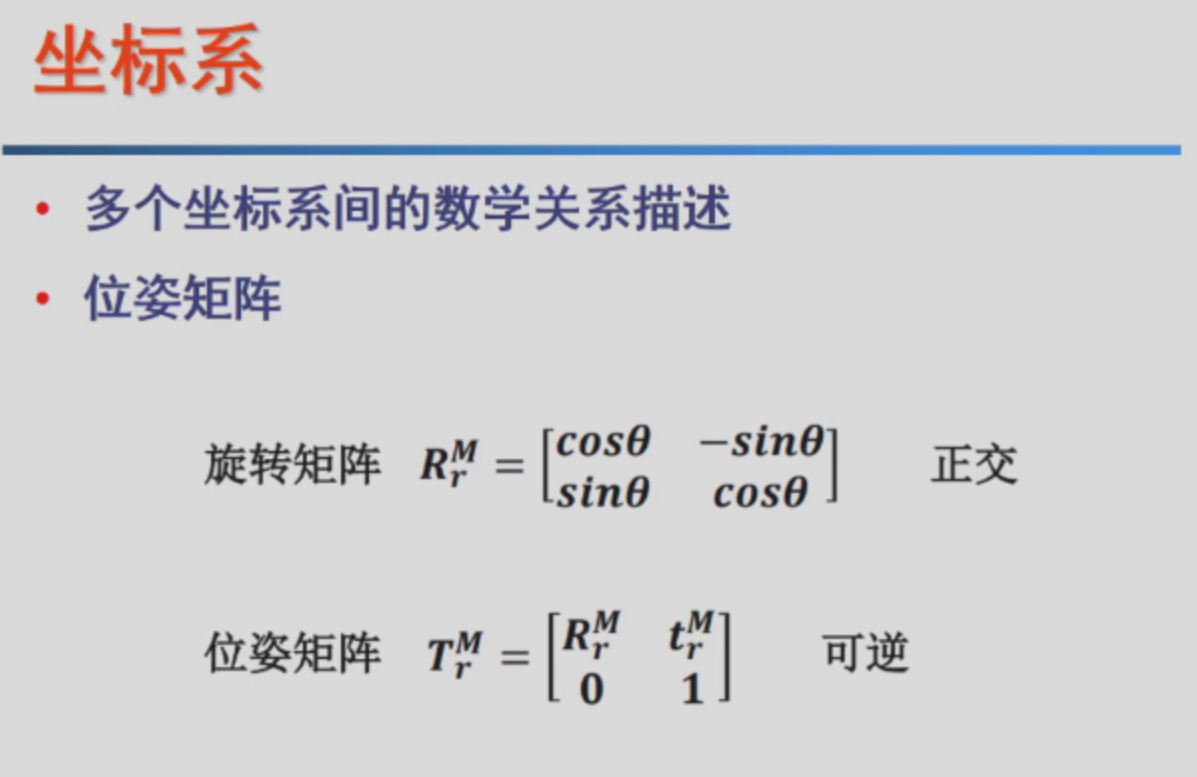
 是地图在机器人下的位姿矩阵
是地图在机器人下的位姿矩阵