复杂的处理交给神经网络
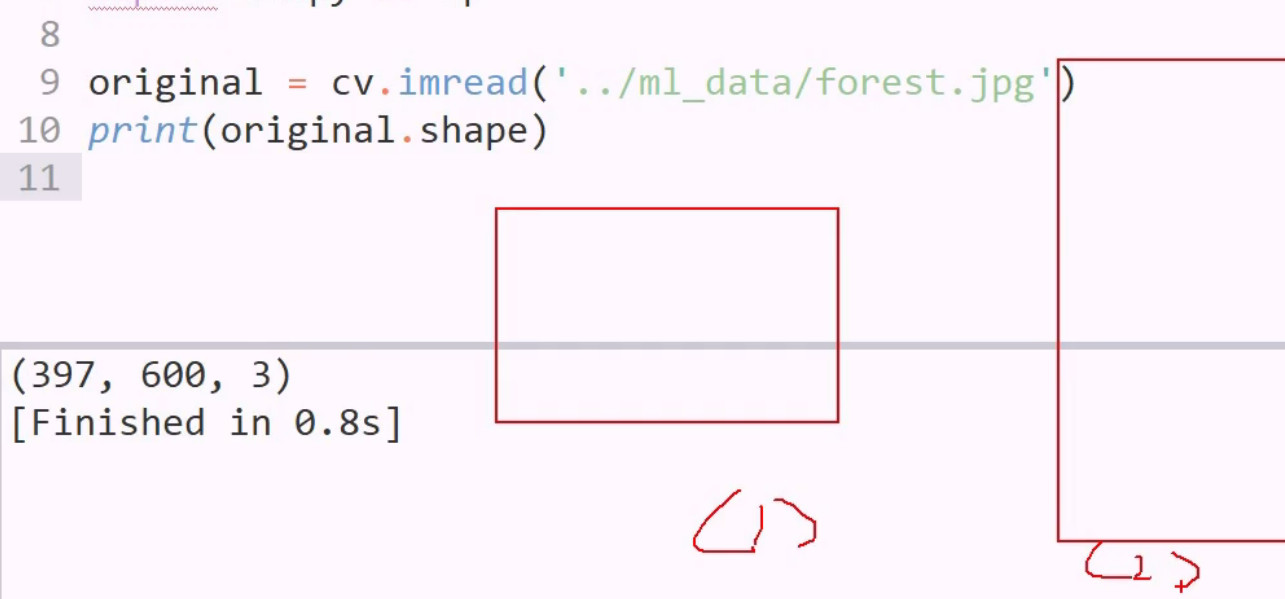
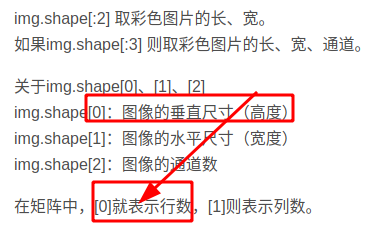
397行,600列
matplot 的imshow 是阻塞的

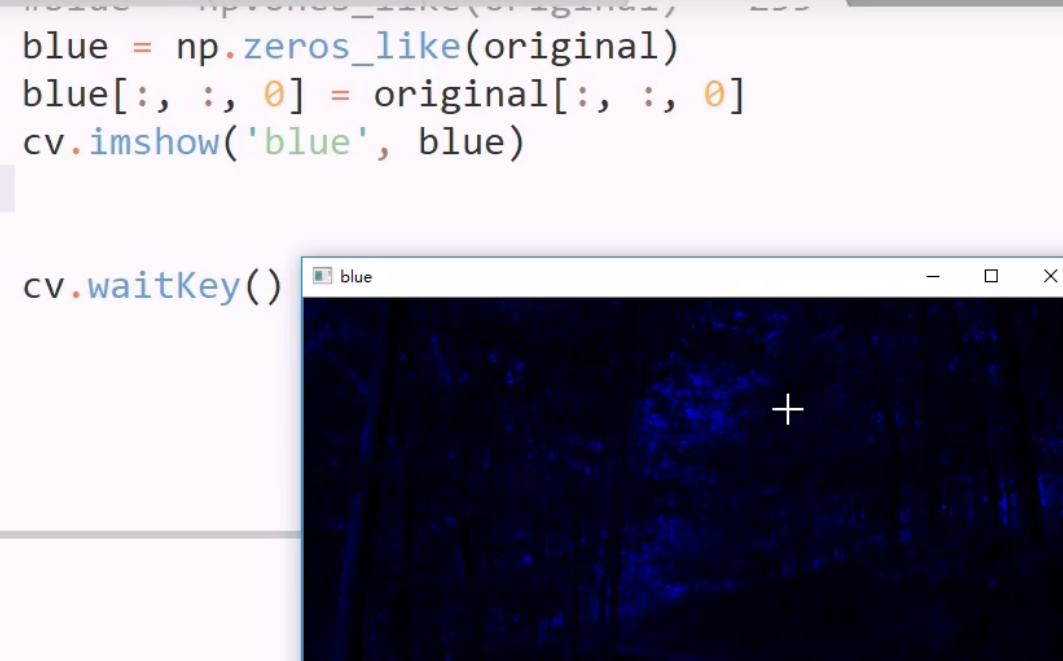
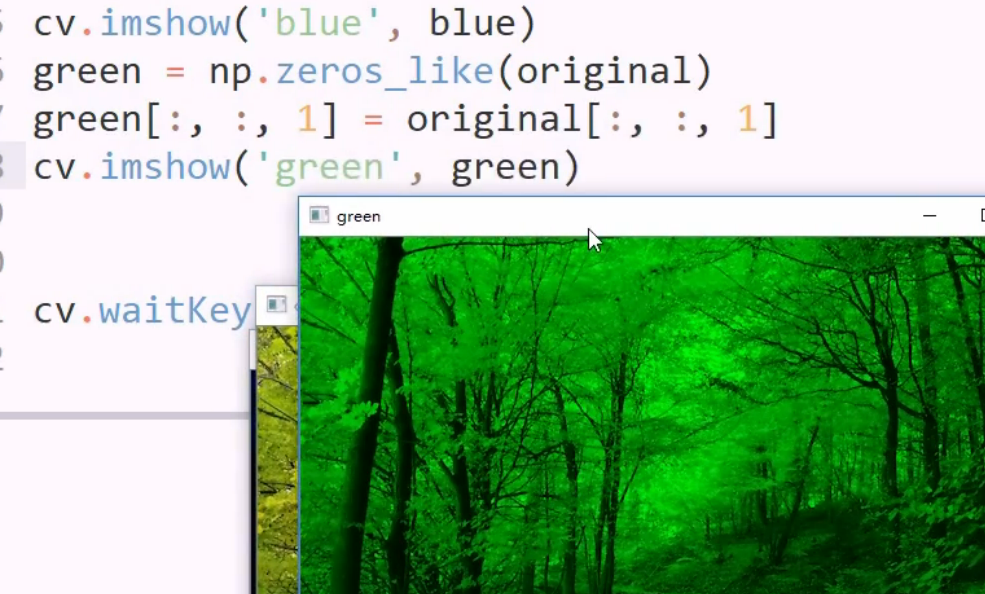
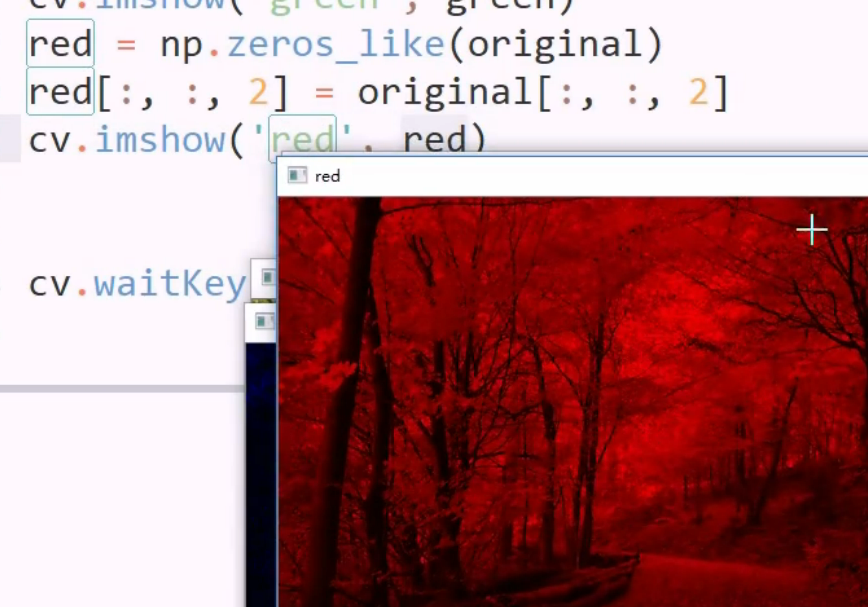
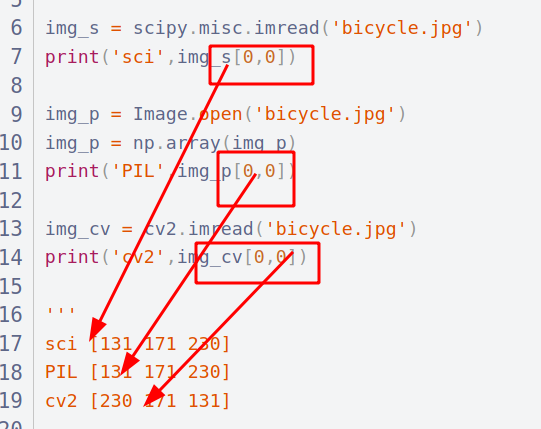
蓝色很少,发黑
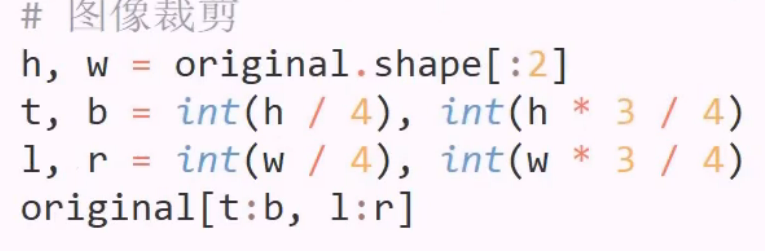
图像裁剪 数组切片
图像缩放

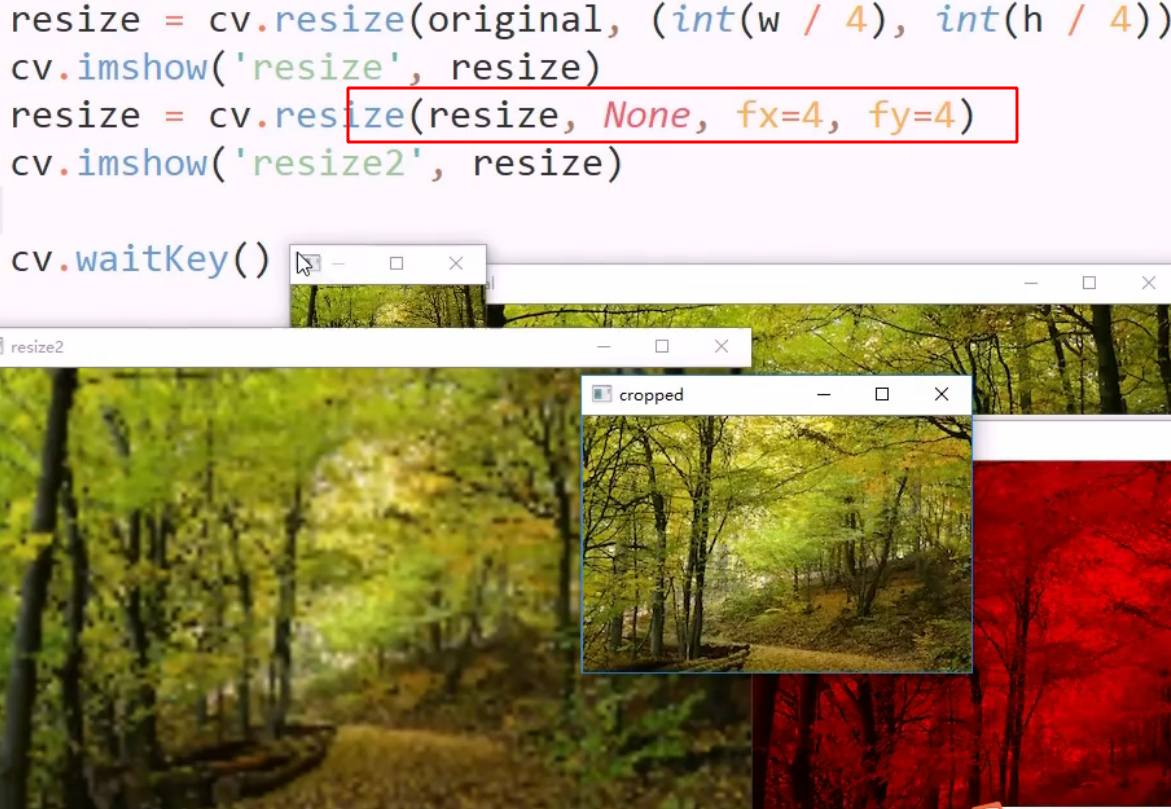
一根变四根,模糊
只能深度学习,还原为清晰图形,因为机器见过清晰的部位,用类似的图填补,不是单纯的计算
图像保存
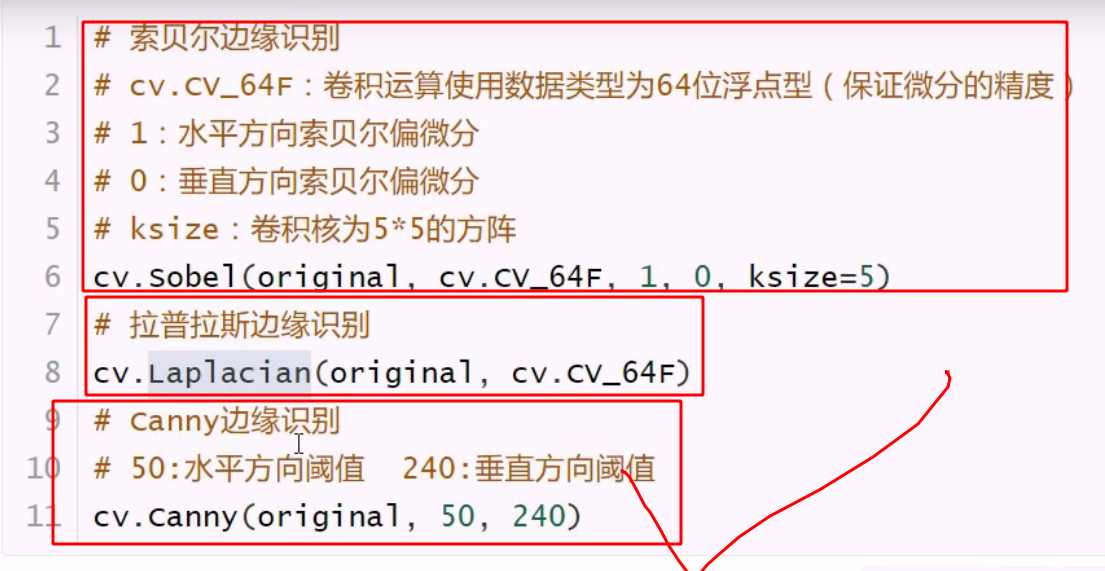
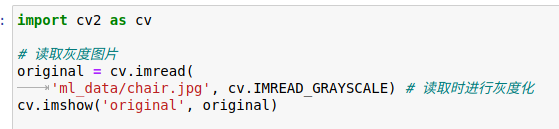
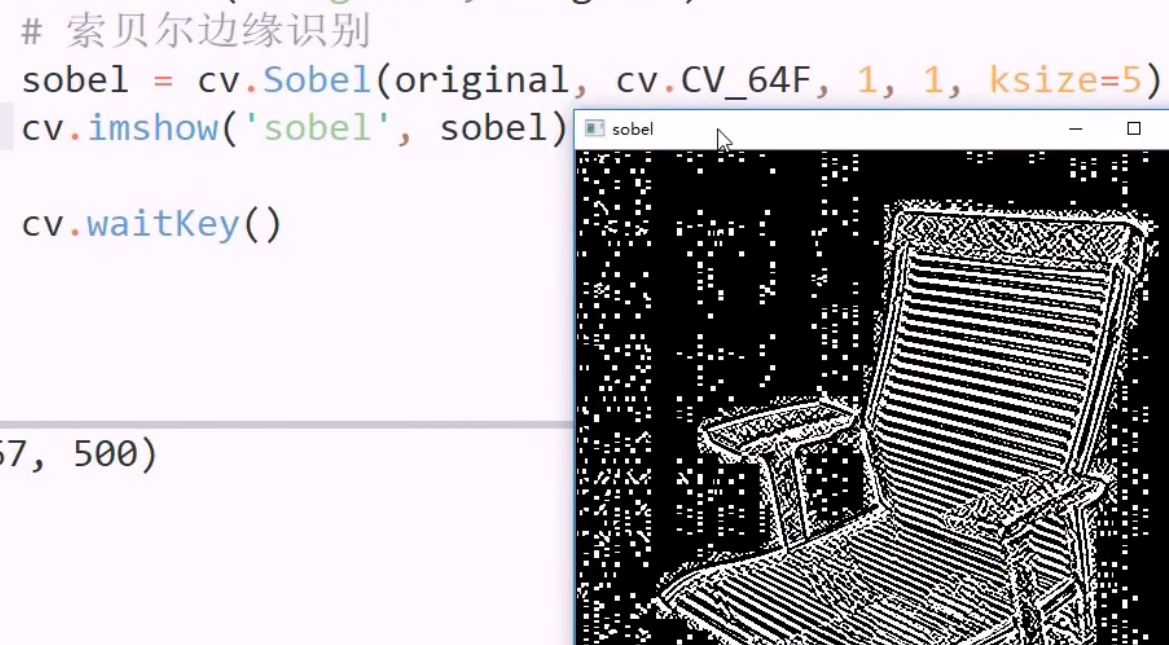
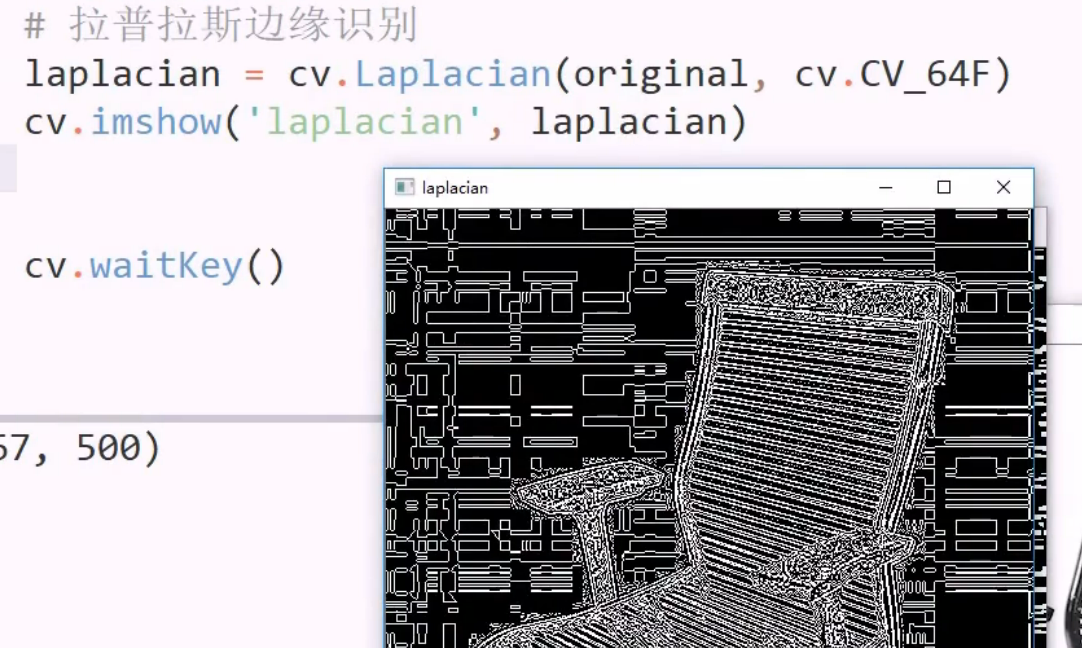
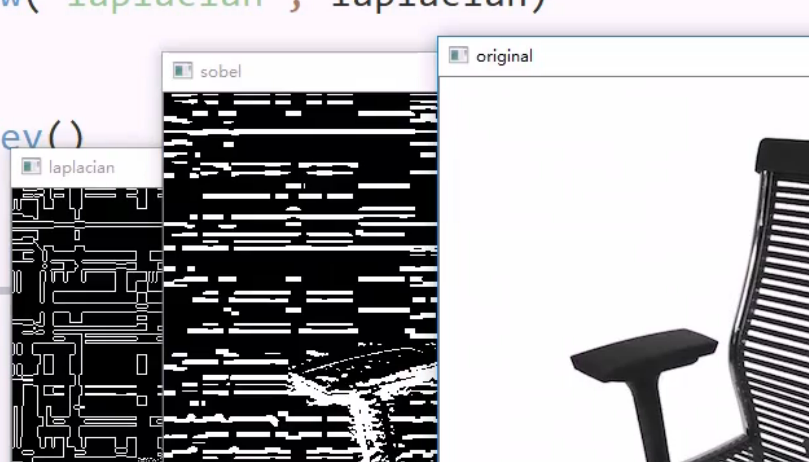
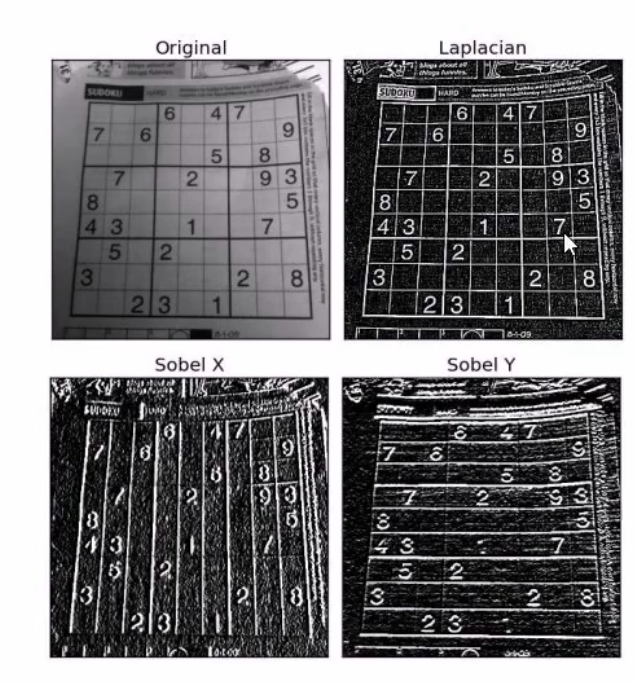
边缘检测
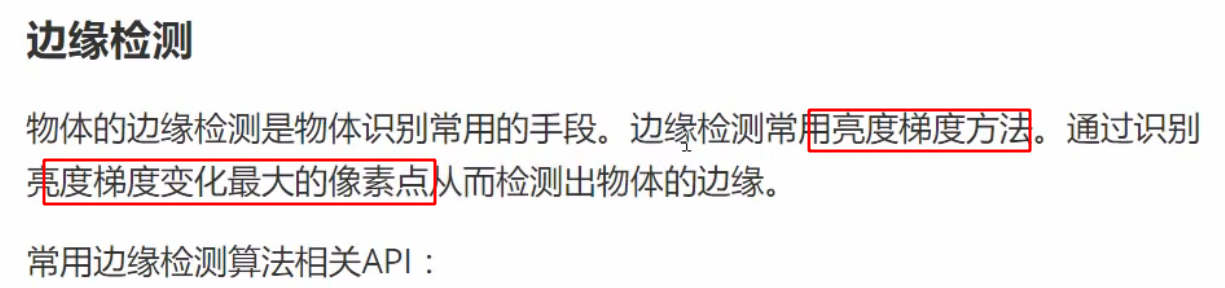 灰度化后,亮度就是高度,可求梯度
灰度化后,亮度就是高度,可求梯度
 边缘为1
边缘为1
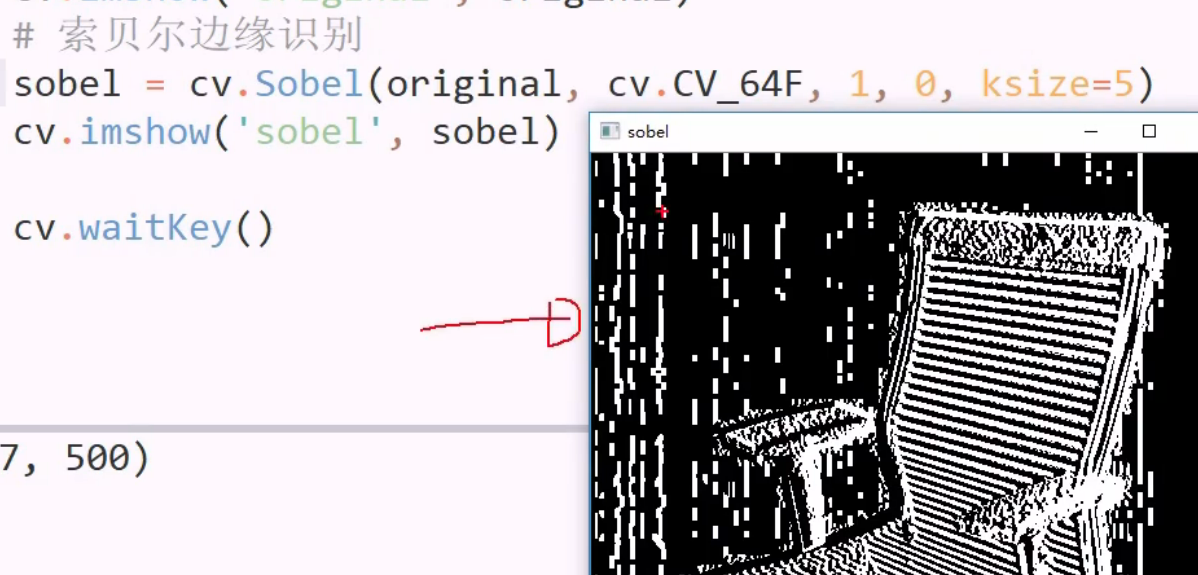 只在水平方向做偏微分
只在水平方向做偏微分
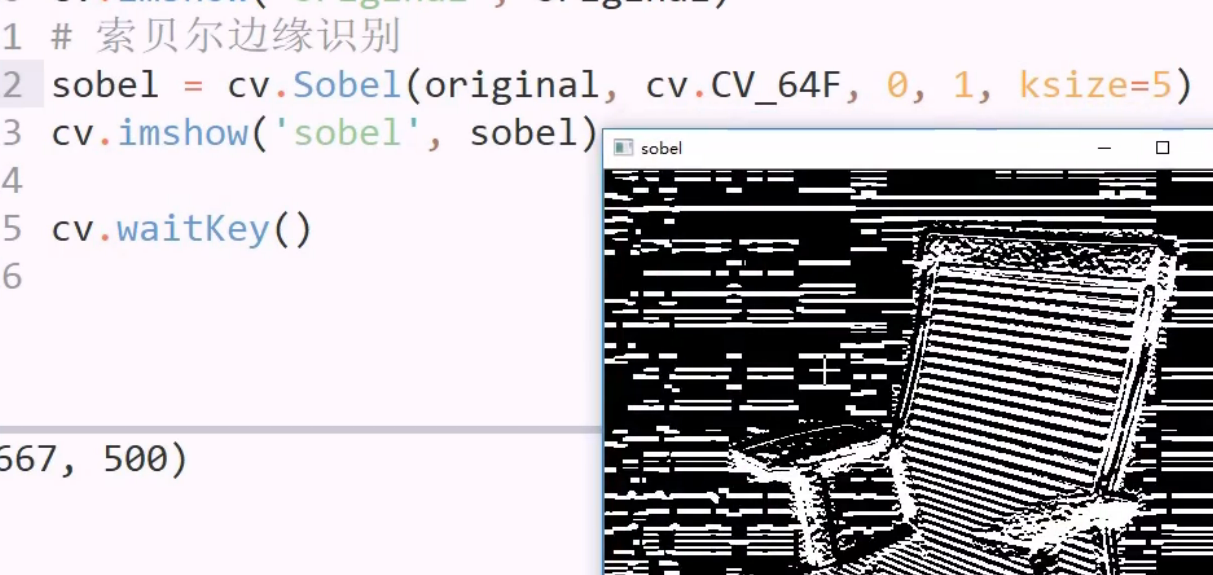
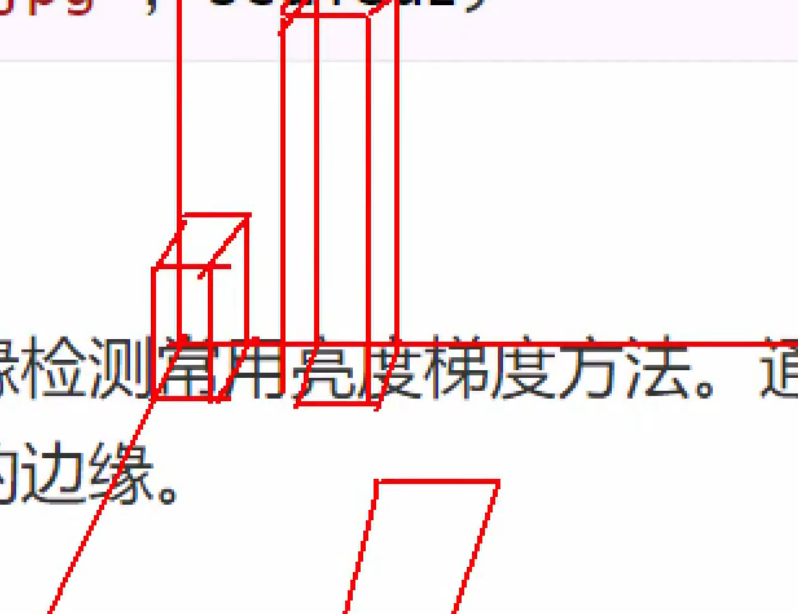
使用阈值,设定边缘
白色背景的边缘,是图片压缩合并像素导致的,不是我们期望的
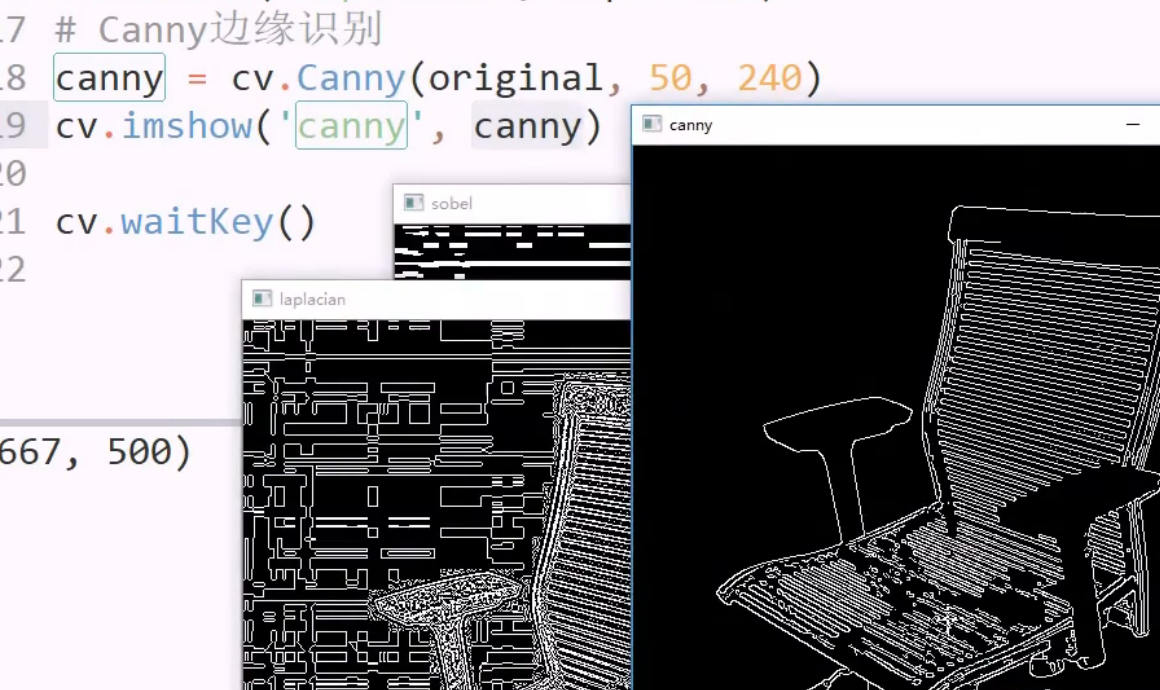
只有变化 超过设定值,才被认为是边缘
可用于抠图
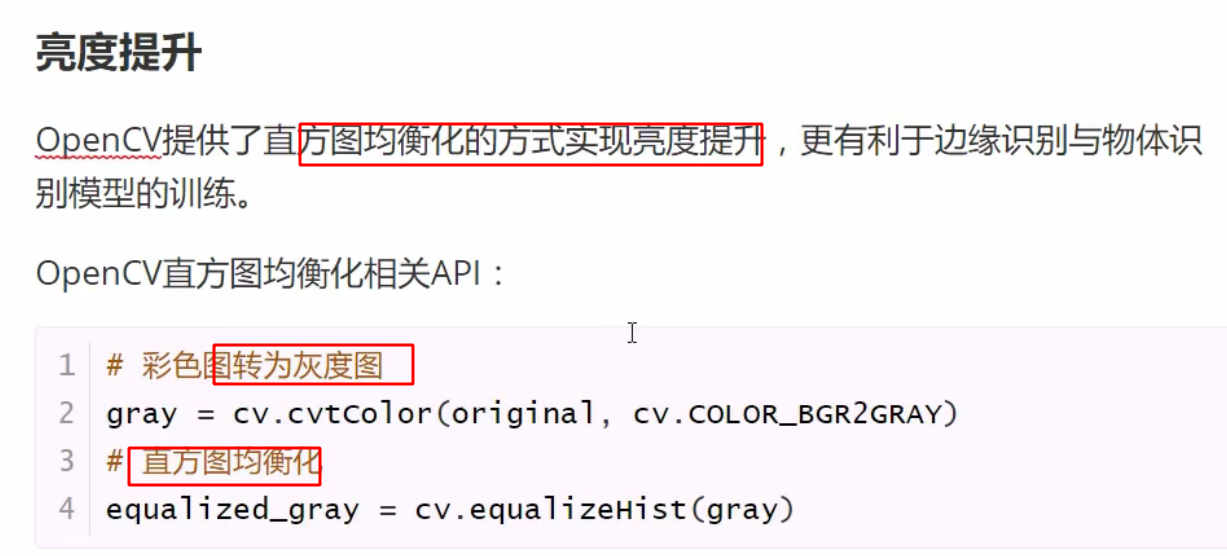
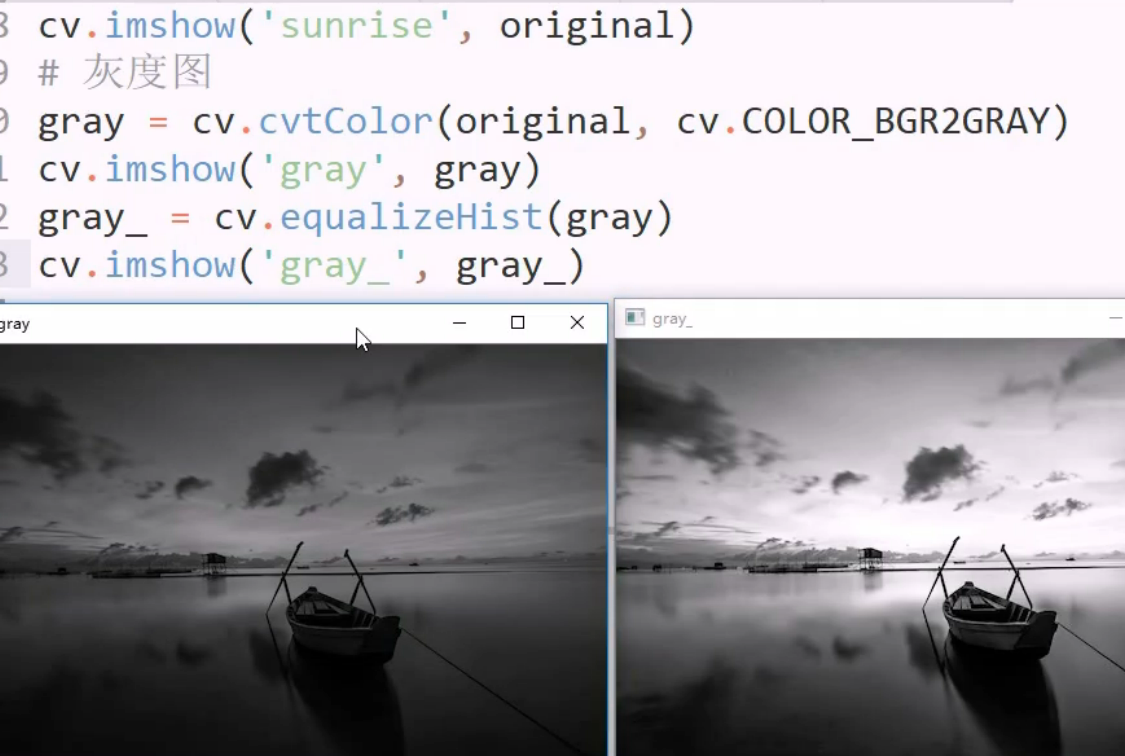
亮度提升 直方图均化
亮度提升有助于边缘检测

亮度暗的图片: 分布靠左 把突出的暗点数量减少
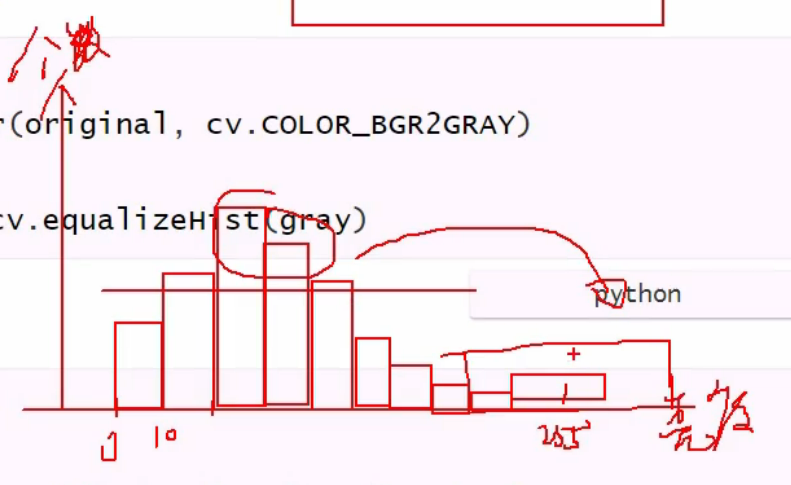
调整的是数量
彩色图提亮: 不能累加三个通道,颜色变了
不能动rgb 而是动色度,亮度,饱和度
我们改的是亮度,不是色彩,要用yuv 空间描述
opencv 使得多个颜色空间可以转换
色度饱和度都不动,只动亮度
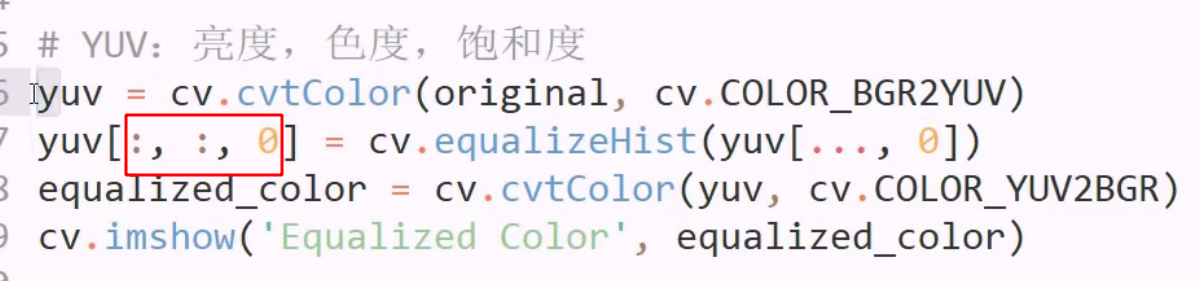 所有行列 的0号通道,即亮度通道 是二维数组
所有行列 的0号通道,即亮度通道 是二维数组
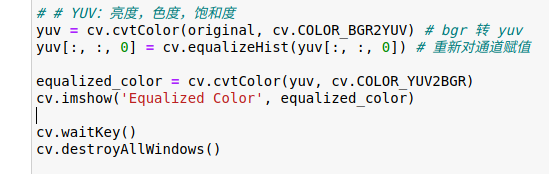
 equalize 使用直方图均衡化,是很好的算法
equalize 使用直方图均衡化,是很好的算法
角点检测
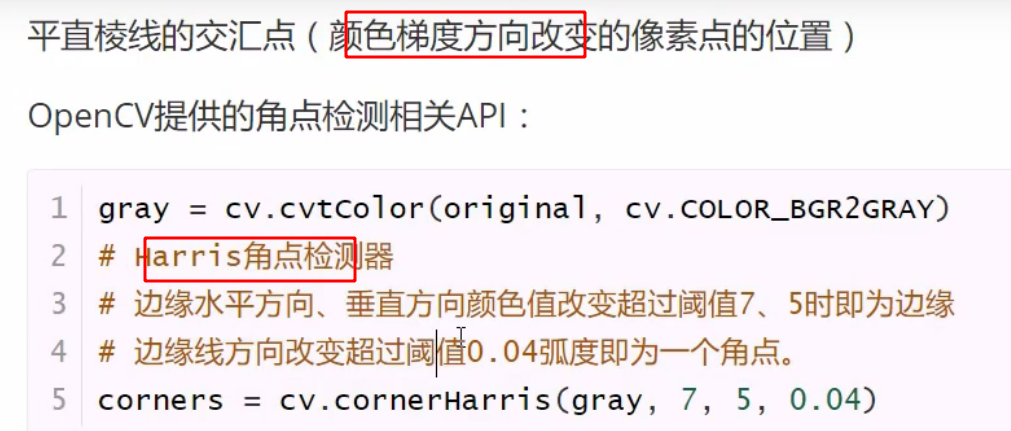 机器检测角点,是关键点
机器检测角点,是关键点
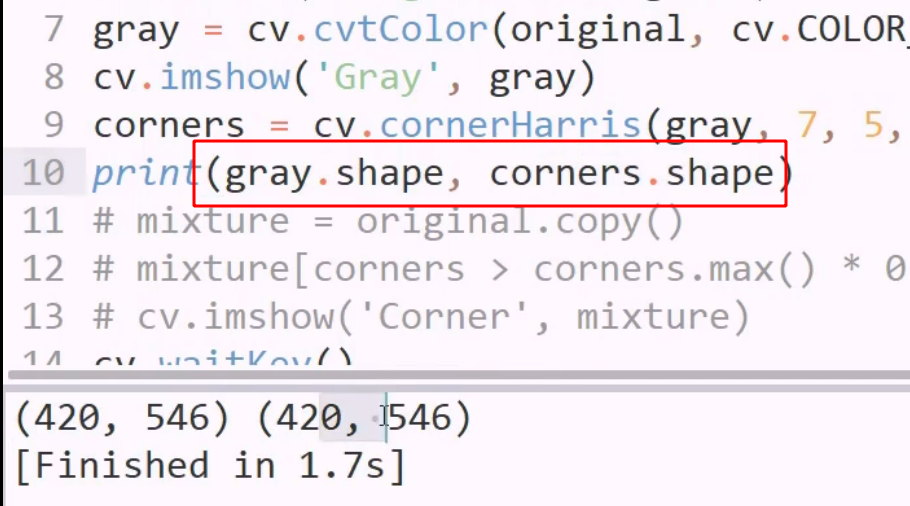
返回原图
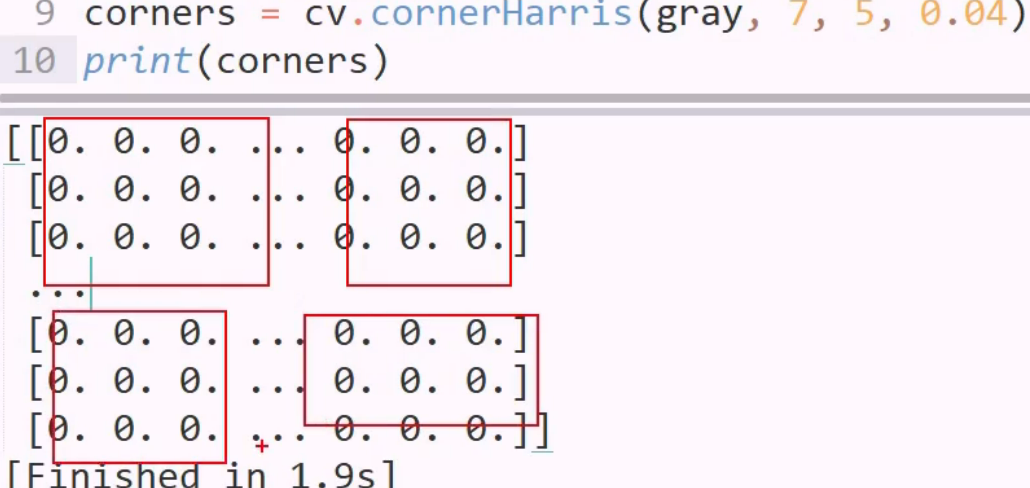
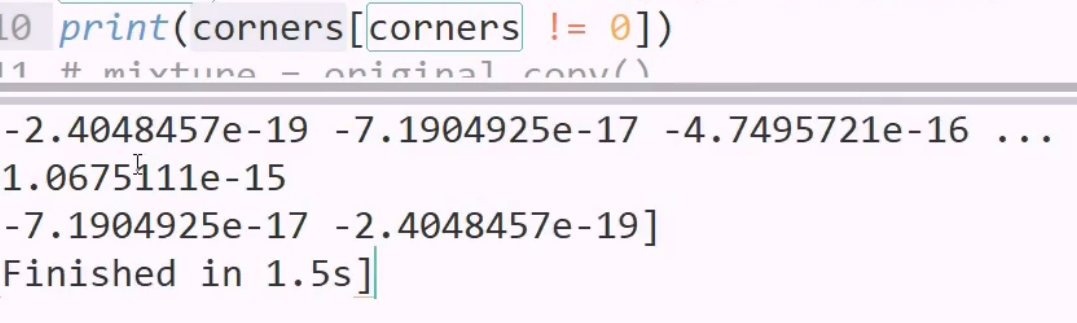 确实有不是0的位置 用掩码拿到
确实有不是0的位置 用掩码拿到
 但是我们不希望看到太小的数值,因为他们其实也是0
但是我们不希望看到太小的数值,因为他们其实也是0
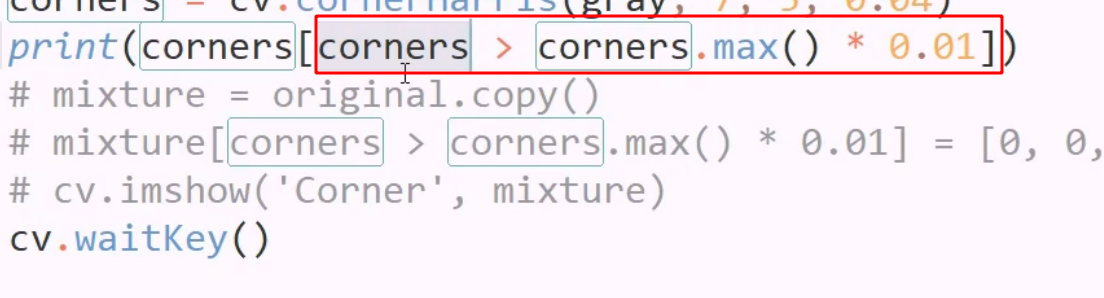
设定阈值,超过就认为是有效的(角点)
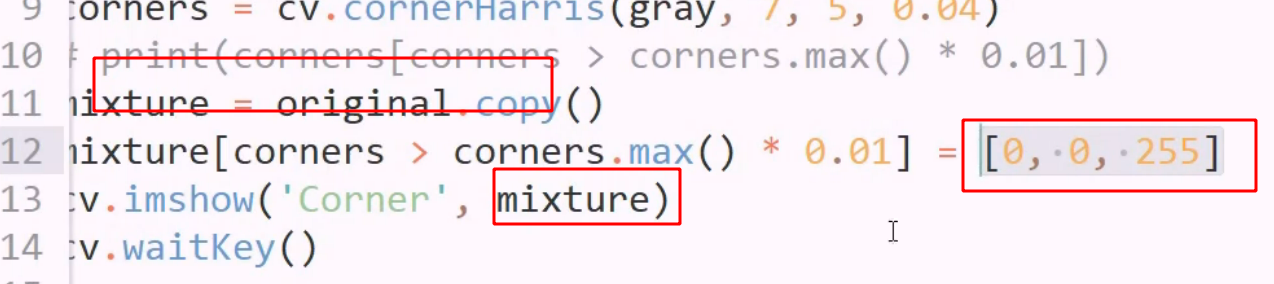 将矩阵中阈值部分改为红色
将矩阵中阈值部分改为红色
一堆点: 通过做聚类 可以拿到聚类中心,作为角点代表
具体的坐标交给机器人,可完成作业
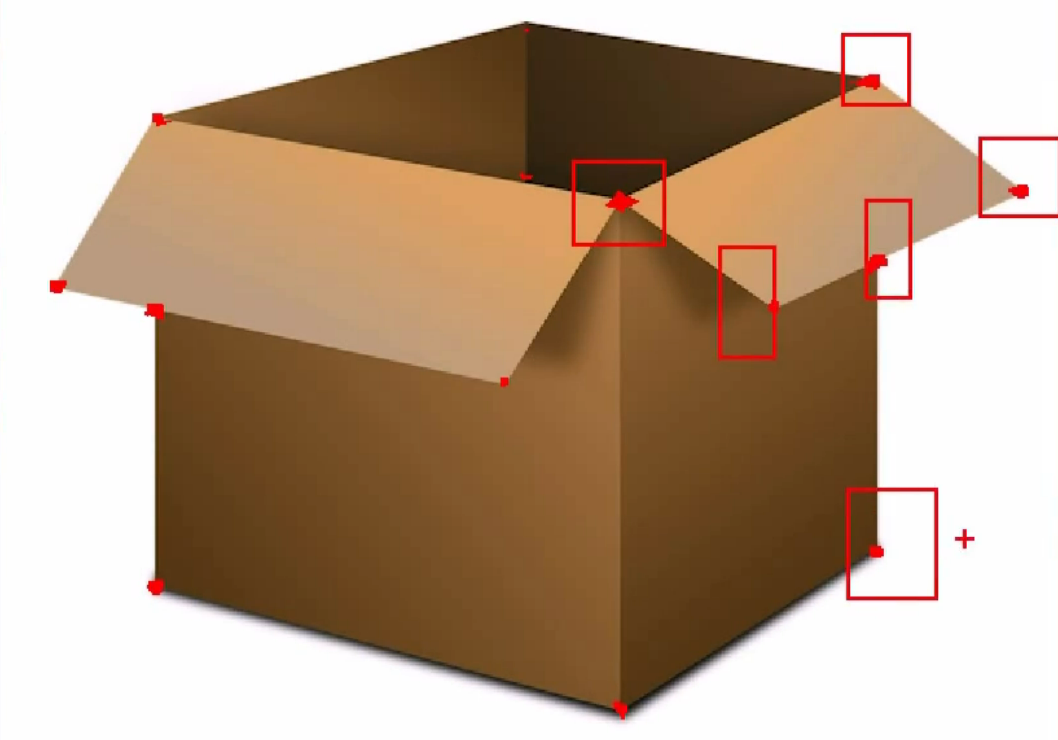
图像特征点检测 sift
用于提取特征的api: 物理意义上的可见的特征点

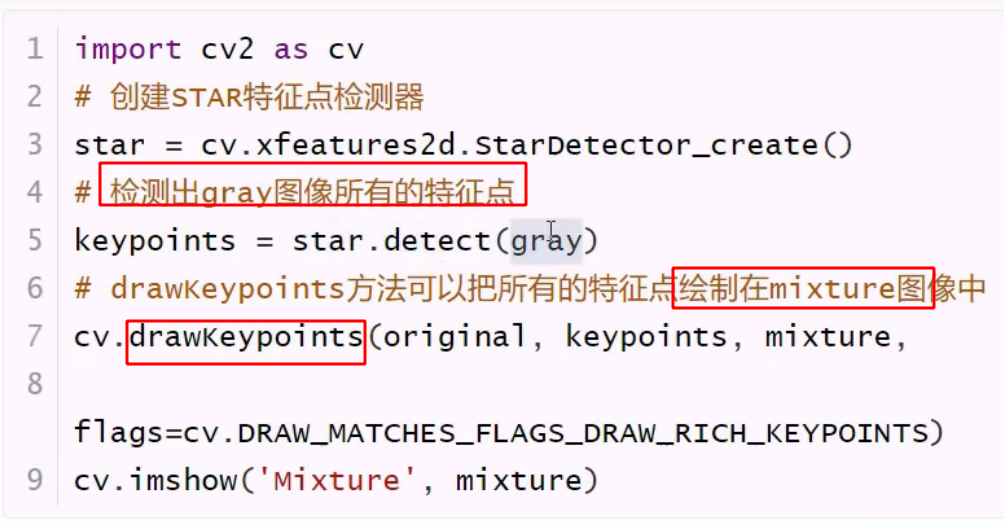 原始图像 特征点 点的坐标(画在哪里),画的模式flag
原始图像 特征点 点的坐标(画在哪里),画的模式flag
最后用imshow 显示副本
提取一张图片的特征值矩阵
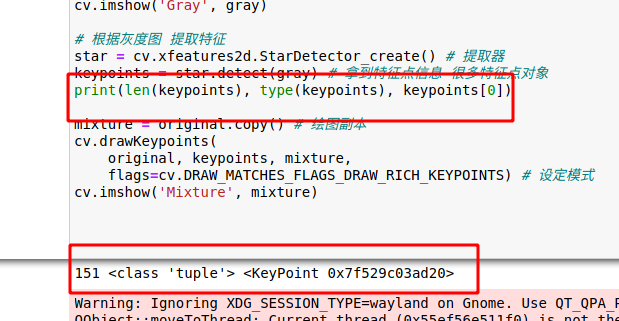 每个特征点对象的属性: 位置,强度,梯度方向等
每个特征点对象的属性: 位置,强度,梯度方向等
 圈大,特征重要,半径是梯度方向,垂直与楞线
圈大,特征重要,半径是梯度方向,垂直与楞线
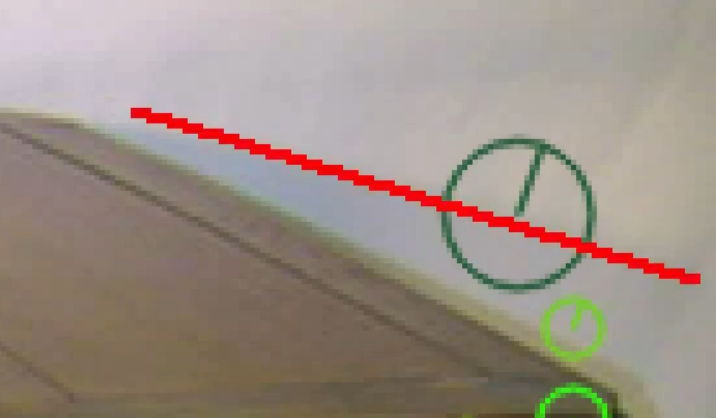
根据梯度方向上的亮度变化计算特征
特征值矩阵 提取图像的矩阵相似
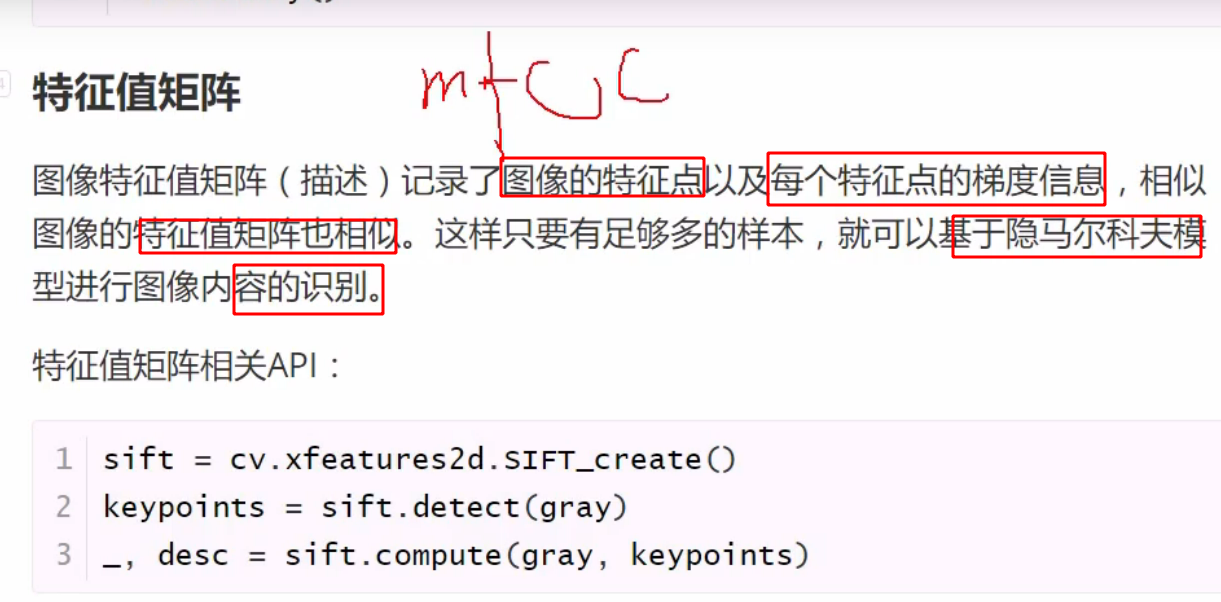
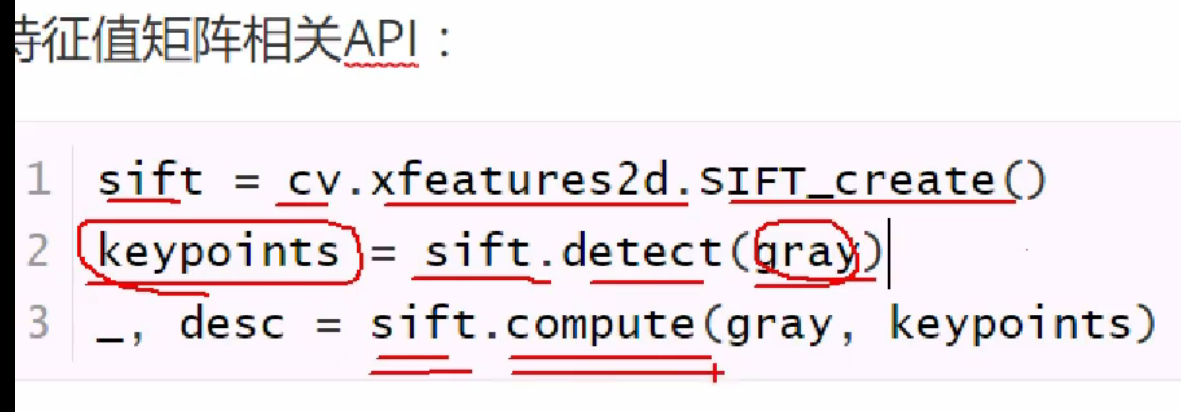 用特征点列表,计算得到特征值矩阵
用特征点列表,计算得到特征值矩阵
n行 128 列
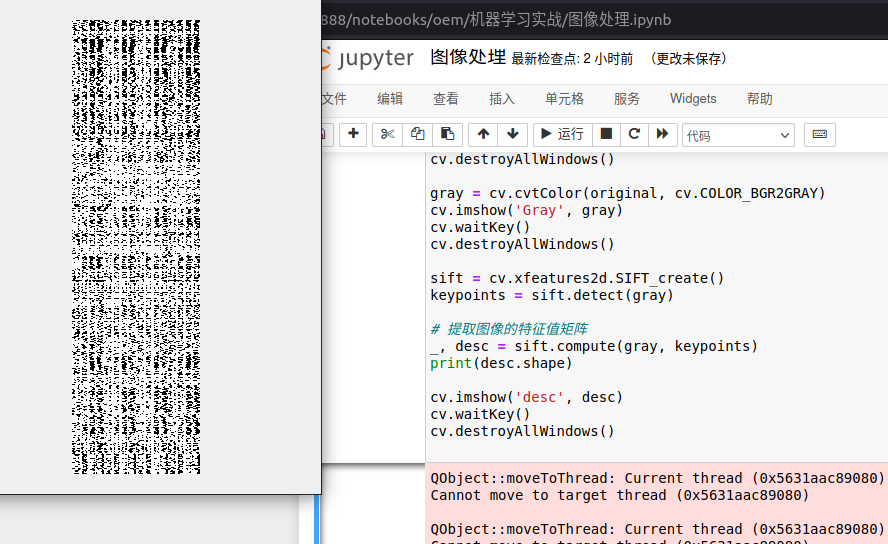
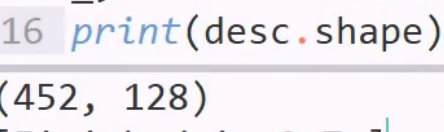 每个样本描述了一个特征点
每个样本描述了一个特征点
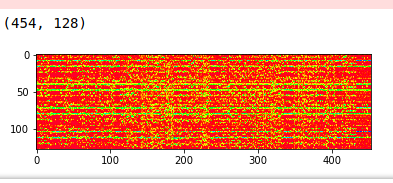 这是计算机看到的桌子的特征
这是计算机看到的桌子的特征
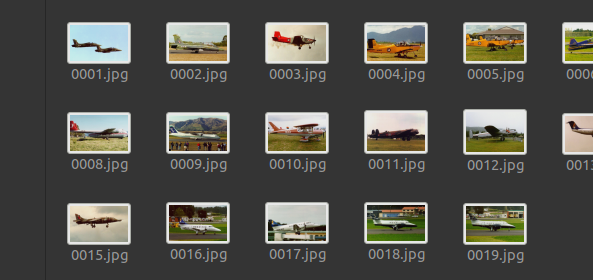
普通机器学习,只能训练同一个方向的飞机 只有相似的图片
深度学习也会因为噪声太多,导致特征矩阵变化巨大
图像的经典处理:
缩小scale,提高效率
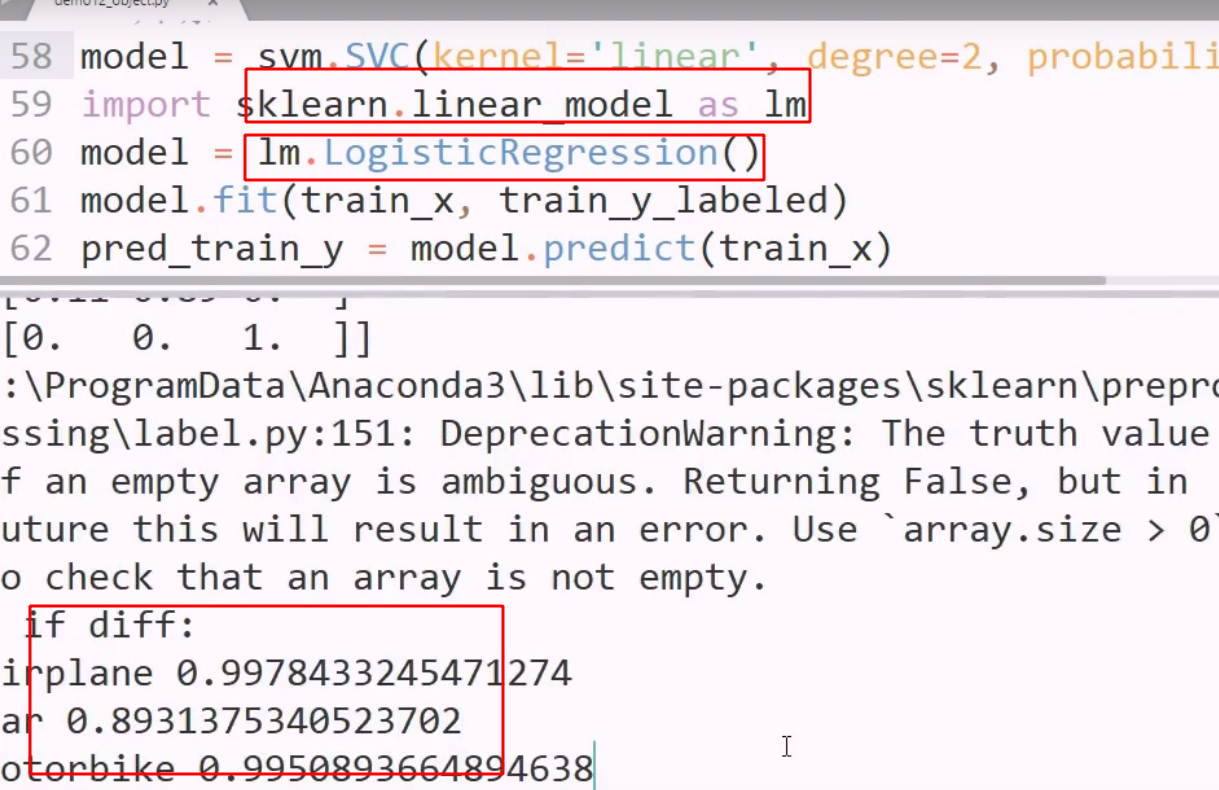
一般逻辑回归求出的概率,大的更大,小的更小,因为 sigmode 使得收敛更加剧烈
openCV

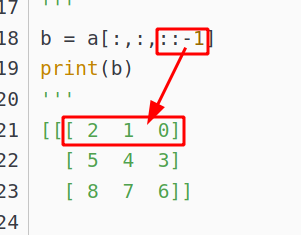 对最小结构(数组) 反转
对最小结构(数组) 反转
 操作像素时,使用的索引是二维
操作像素时,使用的索引是二维

若有收获,就点个赞吧
0 人点赞
