https://kexue.fm/archives/6316
在这个系列中,我们尝试从能量的视角理解GAN。我们会发现这个视角如此美妙和直观,甚至让人拍案叫绝。
本视角直接受启发于Benjio团队的新作《Maximum Entropy Generators for Energy-Based Models》,这篇文章前几天出现在arxiv上。当然,能量模型与GAN的联系由来已久,并不是这篇文章的独创,只不过这篇文章做得仔细和完善一些。另外本文还补充了自己的一些理解和思考上去,力求更为易懂和完整。
作为第一篇文章,我们先来给出一个直白的类比推导:GAN实际上就是一场前仆后继(前挖后跳?)的“挖坑”与“跳坑”之旅~
总的来说,本文的大致内容如下:
1、给出了GAN/WGAN的清晰直观的能量图像;
2、讨论了判别器(能量函数)的训练情况和策略;
3、指出了梯度惩罚一个非常漂亮而直观的能量解释;
4、讨论了GAN中优化器的选择问题。
前“挖”后“跳”#
在这部分中,我们以尽量通俗的比喻来解释什么是能量视角下的GAN。
首先我们有一批样本x1,x2,…,xnx1,x2,…,xn,我们希望能找到一个生成模型,这个模型有能力造出一批新的样本x^1,x^2,…,x^nx^1,x^2,…,x^n,我们希望这批新样本跟原样本很相似。怎么造呢?很简单,分两步走。
“挖坑”#
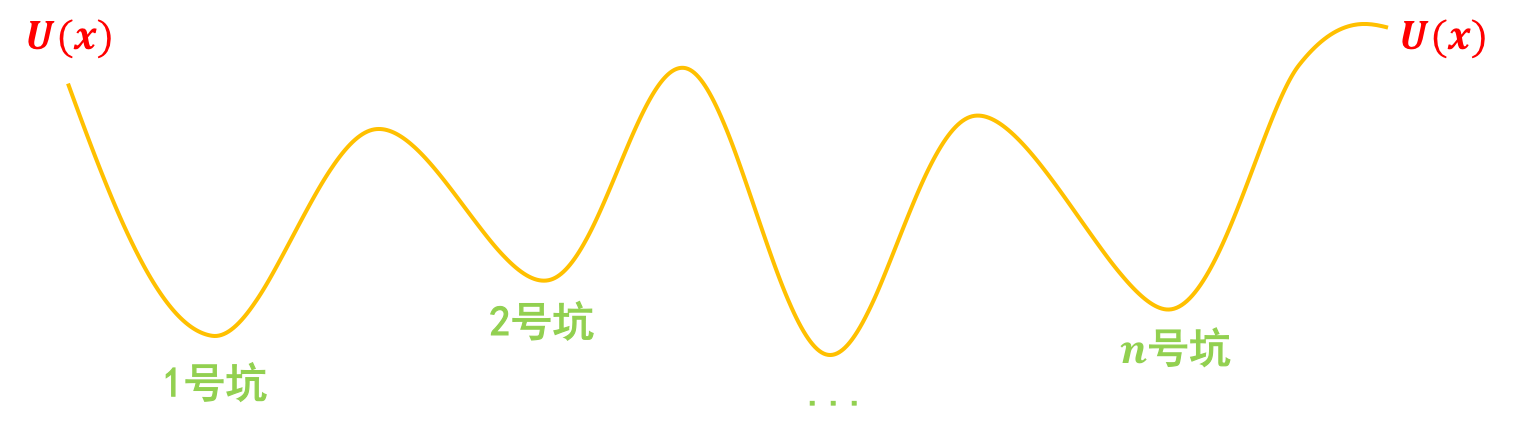
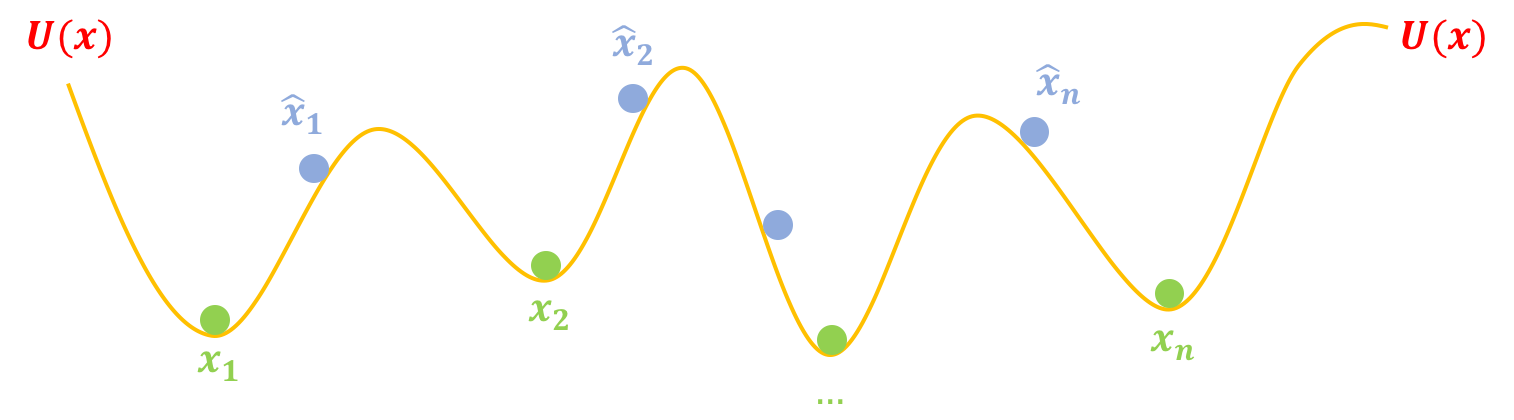
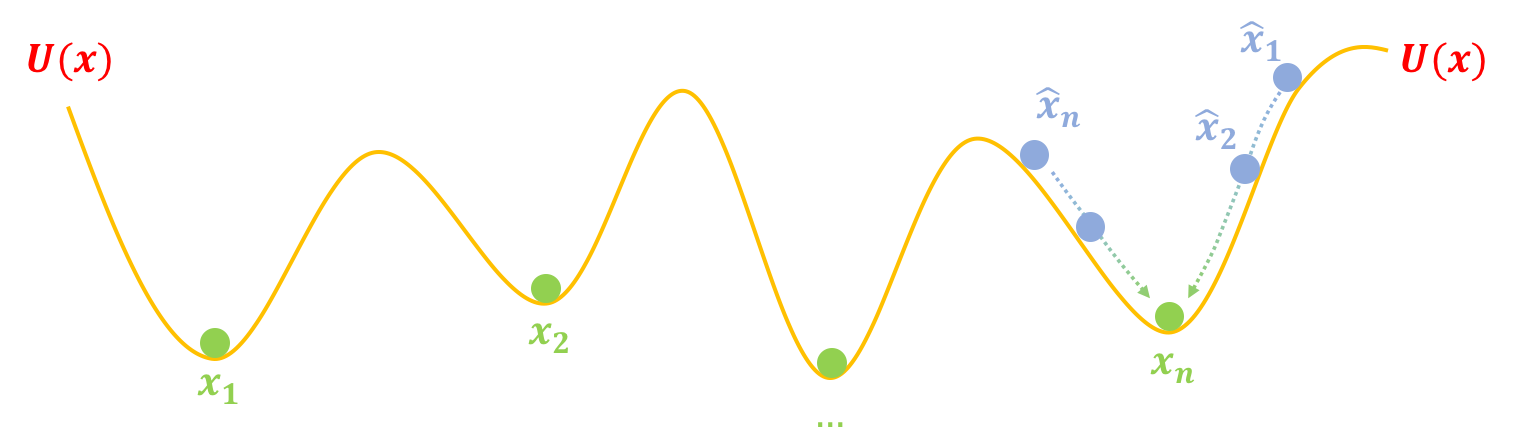
第一步,挖坑:我们把真实样本x1,x2,…,xnx1,x2,…,xn看成一个个坐标,在这些坐标处挖很多坑,这些坑的分布可以用一个能量函数U(x)U(x)描述,这样一来真实样本x1,x2,…,xnx1,x2,…,xn相当于都被放在坑底了,然后我们再把造出来的假样本x^1,x^2,…,x^nx^1,x^2,…,x^n放到“坑腰”:
“跳坑”#
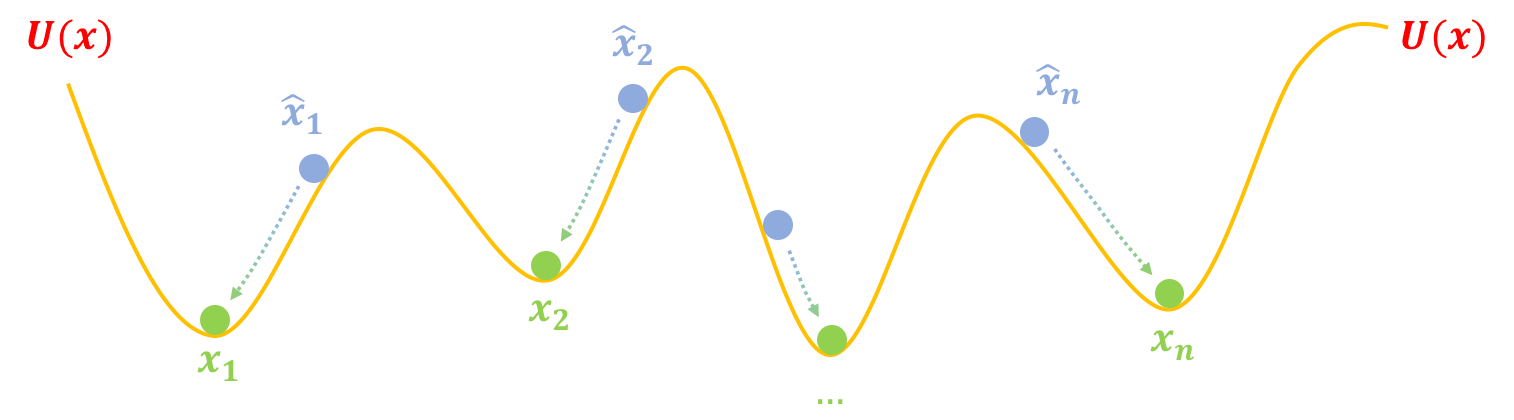
第二步,跳坑:把U(x)U(x)固定住,也就是不要再动坑了,然后把假样本x^1,x^2,…,x^nx^1,x^2,…,x^n松开,显然它们就慢慢从滚到坑底了,而坑底代表着真实样本,所以x^1,x^2,…,x^nx^1,x^2,…,x^n都变得很像真样本了:
把GAN写下来#
注意,上述两步不仅仅是简单的比喻,而是GAN的完整描述了。根据上述两个步骤,我们甚至可以直接把GAN训练公式写出来。
判别器#
首先看“挖坑”,我们说了要将真样本放到坑底,假样本放到坑腰,以便后面假样本可以滚到坑底,这意味着假样本的“平均海拔”要高于真样本的“平均海拔”,也就是说
Ex∼p(x)[U(x)]−Ex∼q(x)U(x)(1)Ex∼p(x)[U(x)]−Ex∼q(x)[U(x)]
尽量小,这里我们用p(x)p(x)表示真实样本的分布,q(x)q(x)表示假样本的分布。假样本通过x=G(z)x=G(z)生成,而z∼q(z)z∼q(z)是标准正态分布。
梯度惩罚#
另外,我们还说真样本要在坑底,用数学的话说,坑底就是一个极小值点,导数等于0才好,即要满足∇xU(x)=0∇xU(x)=0是最理想的,换成优化目标的话,那就是∥∇xU(x)∥2‖∇xU(x)‖2越小越好。两者综合起来,我们就得到UU的优化目标
U==argminUEx∼p(x)[U(x)]−Ex∼q(x)[U(x)]+λEx∼p(x)[∥∇xU(x)∥2]argminUEx∼p(x)[U(x)]−Ez∼q(z)[U(G(z))]+λEx∼p(x)∥∇xU(x)∥2(2)U=argminUEx∼p(x)[U(x)]−Ex∼q(x)[U(x)]+λEx∼p(x)[‖∇xU(x)‖2]=argminUEx∼p(x)[U(x)]−Ez∼q(z)[U(G(z))]+λEx∼p(x)[‖∇xU(x)‖2]
注:以往对于梯度惩罚,我们总会有两个困惑:1、梯度惩罚究竟是以0为中心好还是以1为中心好;2、梯度惩罚要对真样本、假样本还是真假插值样本进行?现在,基于能量视角,我们可以得到“对真样本进行以0为中心的梯度惩罚”比较好,因为这意味着(整体上)要把真样本放在极小值点处~
至此,在能量视角下,我们对梯度惩罚有了一个非常直观的回答。
生成器#
然后看“跳坑”,也就是坑挖好了,UU固定了,我们让假样本滚到坑底,也就是让U(x)U(x)下降,滚到最近的一个坑,所以
G=argminGEz∼q(z)U(G(z))(3)G=argminGEz∼q(z)[U(G(z))]
可以看到,判别器实际上就是在“造势”,而生成器就是让势能最低,这便是能量GAN的主要思想~
交替训练#
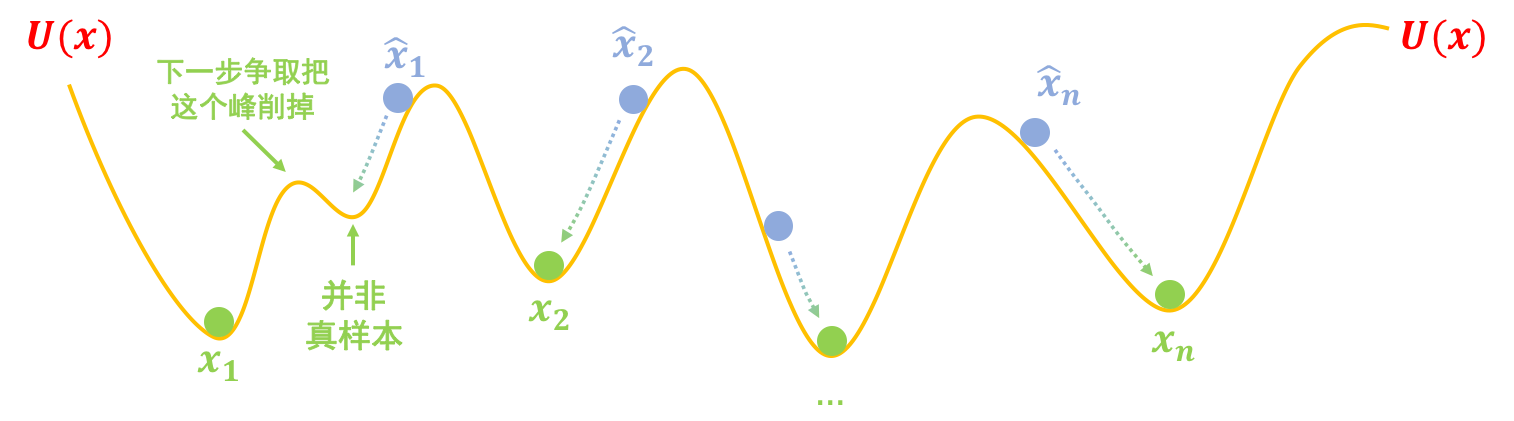
如果真实情况的坑都像上面的图那么简单,那么可能就只需要两步就能训练完一个生成模型了。但是真实情况下的坑可能是很复杂的,比如下图中假样本x^1x^1慢慢下滑,并不一定能到达x1x1的坑,而是到达一个中间的坑,这个中间的坑并非代表真样本,可能仅仅是“次真”的样本,所以我们需要不断地改进假样本,也需要不断地把坑修正过来(比如争取能下一步把阻碍前进的峰“削掉”)。这也就是说,我们需要反复、交替地执行(1),(3)(1),(3)两步。
坑的学问#
看,头脑中想象着几个坑,我们就可以把GAN的完整框架导出来了,而且还是先进的WGAN-GP的升级版:以0为中心的梯度惩罚。
GAN不过是一场坑的学问!
对这个GAN的进一步讨论,可以参考我之前写的博客《WGAN-div:一个默默无闻的WGAN填坑者》或者论文《Which Training Methods for GANs do actually Converge?》。
进一步思考#
上述图景还能帮助我们回答很多问题。比如判别器能不能不要梯度惩罚?为什么GAN的训练、尤其是生成器的训练多数都不用带动量的优化器,或者就算用带动量的优化器,也要把动量调小一点?还有mode collapse(模式坍缩)是怎么发生呢?
Hinge Loss#
梯度惩罚在理论上很漂亮,但是它确实太慢,所以从实践角度来看,其实能不用梯度惩罚的话最好不用梯度惩罚。但是如果不用梯度惩罚,直接最小化式(1)(1),很容易数值不稳定。
这不难理解,因为没有约束情况下,很容易对于真样本有U(x)→−∞U(x)→−∞,对于假样本有U(x)→+∞U(x)→+∞,也就是判别器优化得太猛了,差距拉得太大(无穷大)了。那么一个很自然的想法是,分别给真假样本分别设置一个阈值,U(x)U(x)的优化超过这个阈值就不要再优化了,比如:
Ex∼p(x)[max(0,1+U(x))]+Ex∼q(x)max(0,1−U(x))(4)Ex∼p(x)[max(0,1+U(x))]+Ex∼q(x)[max(0,1−U(x))]
这样一来,对于x∼p(x)x∼p(x),如果U(x)<−1U(x)<−1,则max(0,1+U(x))=0max(0,1+U(x))=0,对于x∼q(x)x∼q(x),U(x)>1U(x)>1,则max(0,1−U(x))=0max(0,1−U(x))=0,这两种情况下都不会在优化U(x)U(x)了,也就是说对于真样本U(x)U(x)不用太小,对于假样本U(x)U(x)不用太大,从而防止了U(x)U(x)过度优化了。
这个方案就是SNGAN、SAGAN、BigGAN都使用的hinge loss了。
当然,如果U(x)U(x)本身就是非负的[比如EBGAN中用自编码器的MSE作为U(x)U(x)],那么可以稍微修改一下式(4)(4):
Ex∼p(x)[U(x)]+Ex∼q(x)max(0,m−U(x))(5)Ex∼p(x)[U(x)]+Ex∼q(x)[max(0,m−U(x))]
优化器#
至于优化器的选择,其实从“跳坑”那张图我们就可以看出答案来。
带动量的优化器有利于我们更快地找到更好的极小值点,但是对于GAN来说,其实我们不需要跑到更好的极小值点,我们只需要跑到最近的极小值点,如果一旦跳出了最近的极小值点,跑到更低的极小值点,那么可能就丧失了多样性,甚至出现mode collapse。
比如下图中的x^2x^2,不带动量的优化算法能让x^2x^2跑到x2x2处就停下来,如果带动量的话,那么可能越过x2x2甚至跑到x1x1去了。尽管x1x1也是真样本,但是这样一来x^1,x^2x^1,x^2同时向x1x1靠拢,也许没有假样本能生成x2x2了,从而丧失了多样性。

带动量与不带动量的优化轨迹比较:不带动量时,假样本只需要落到最近一个坑,如果带动量的话,可能越过最近的坑,到达更远的坑去,导致假样本聚集在某些真样本附近,丧失多样性
所以,在GAN的优化器中,动量不能太大,太大反而有可能丧失生成样本的多样性,或者造成其他的不稳定情况。同理,学习率也不能太大。总之,一切加速手段都不能太猛了。
Mode Collapse#
什么是mode collapse?为什么会发生mode collapse?还是可以用这个图景来轻松解释。
前面我们画的图把假样本x^x^画得很合理,但是如果一旦初始化不好、优化不够合理等原因,使得x^x^同时聚在个别坑附近,比如:
mode collapse图示
这时候按照上述过程优化,所有假样本都都往xnxn奔了,所以模型只能生成单一(个别)样式的样本,这就是mode collapse。
简单来看,mode collapse是因为假样本们太集中,不够“均匀”,所以我们可以往生成器那里加一个项,让假样本有均匀的趋势。这个项就是假样本的熵H(X)=H(G(Z))H(X)=H(G(Z)),我们希望假样本的熵越大越好,这意味着越混乱、越均匀,所以生成器的目标可以改为
G=argminG−H(G(Z))+Ez∼q(z)U(G(z))(6)G=argminG−H(G(Z))+Ez∼q(z)[U(G(z))]
这样理论上就能解决mode collapse的问题。至于H(X)H(X)怎么算,我们后面会详细谈到。
能量视角之美#
对于GAN来说,最通俗易懂的视角当属“造假者-鉴别者”相互竞争的类比,这个视角直接导致了标准的GAN。但是,这个通俗的类比无法进一步延伸到WGAN乃至梯度惩罚等正则项的理解。
相比之下,能量视角相当灵活,它甚至能让我们直观地理解WGAN、梯度惩罚等内容,这些内容可以说是目前GAN领域最先进的部分成果了。虽然看起来能量视角比“造假者-鉴别者”形式上复杂一些,但其实它的物理意义也相当清晰,稍加思考,我们会感觉到它其实更为有趣、更具有启发性,有种“越嚼越有味”的感觉~

若有收获,就点个赞吧
0 人点赞
