代码
#读取import cv2, mathimport numpy as npimport matplotlib.pyplot as plt## 定义图像目录image_directory = 'D:\\PyDev\\CVHomework\\images\\'# 图像读取imgname = image_directory + 'lena.jpg'img = cv2.imread(imgname)# 图像显示在一个新的名字为'image'的窗口中,如果看不到,在任务栏中把窗口恢复后观察图像,在窗口中按任意键关闭窗口cv2.imshow('image',img)cv2.waitKey(0)cv2.destroyAllWindows()
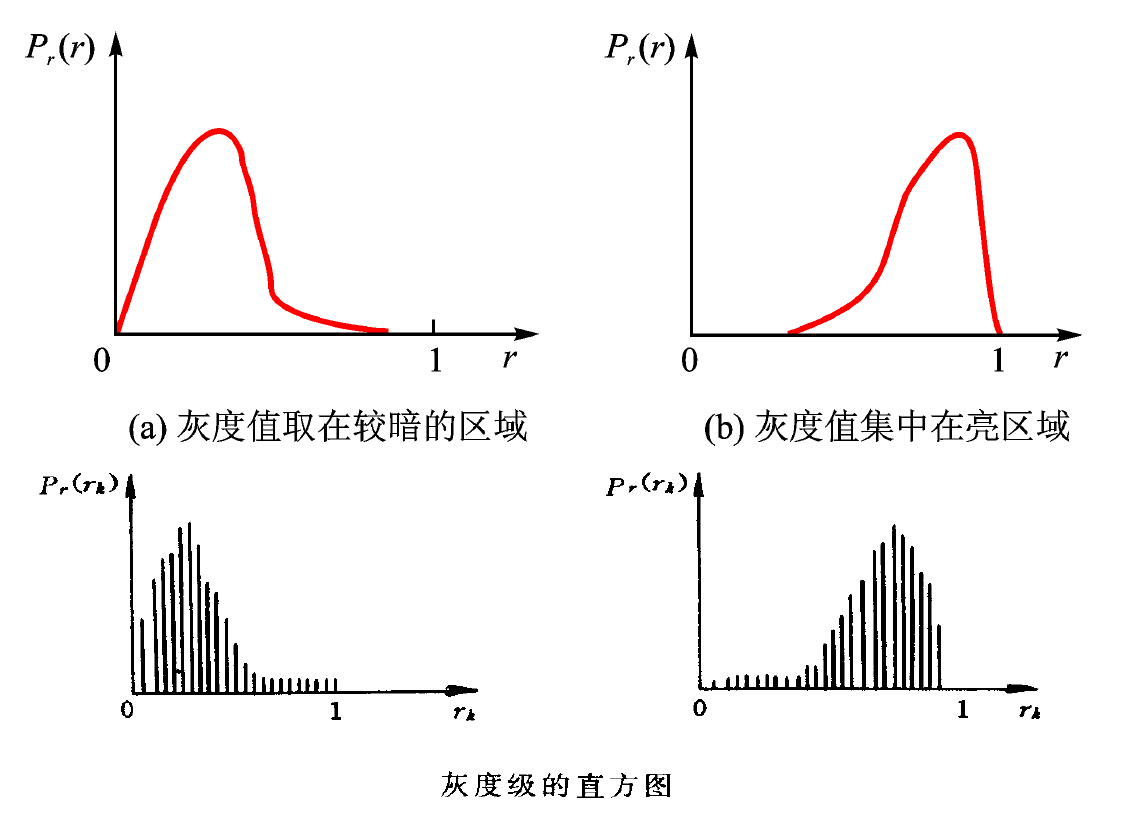
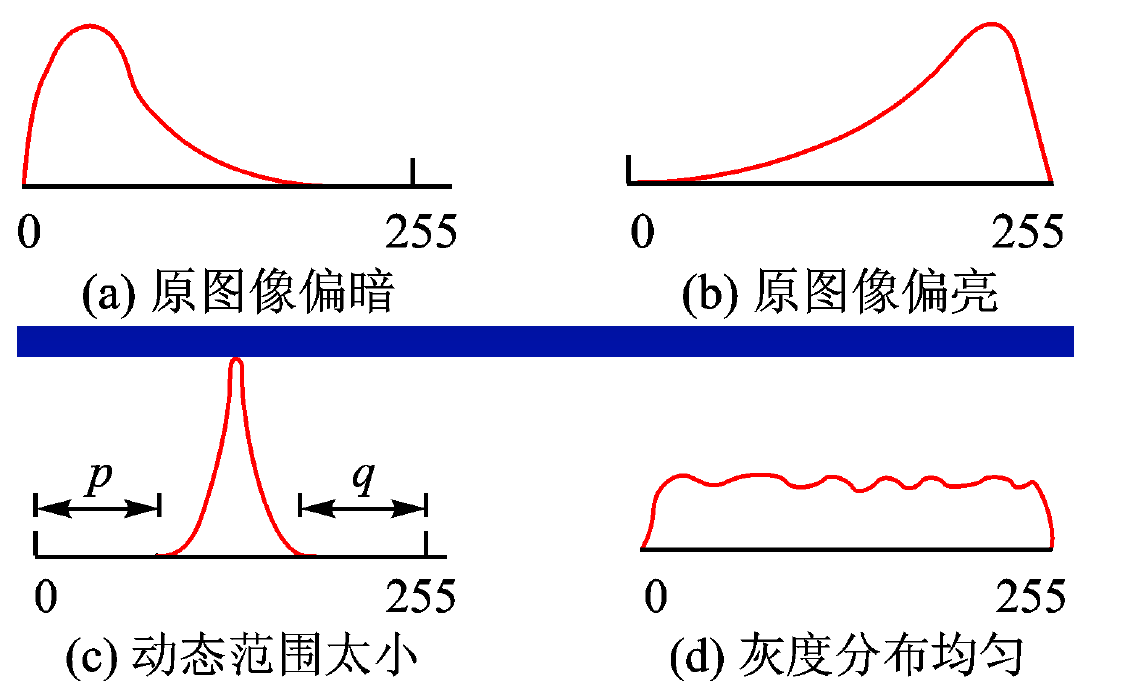
1. 直方图均衡化
灰度均衡化
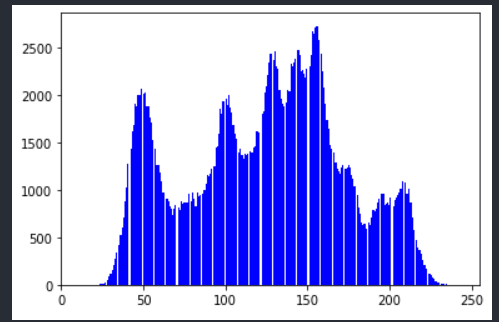
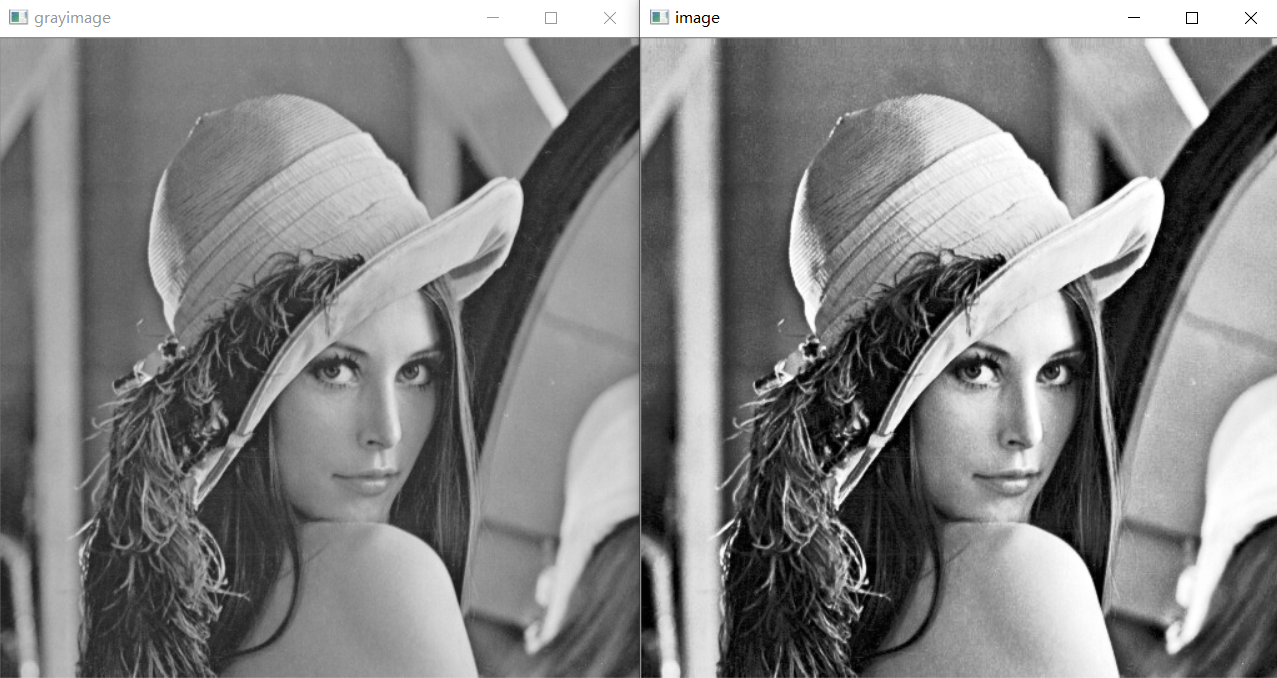
# 计算直方图grayimg = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) # 彩色图像转化为灰度图像hist = cv2.calcHist([grayimg], [0], None, [256], [0, 256]) # 仅对 0 通道# 显示直方图r_hist = plt.hist(grayimg.ravel(), bins=256, color='b')plt.xlim([0, 255])plt.show()# 显示灰度图像cv2.imshow('grayimage',grayimg)# 直方图均衡化dstimg = cv2.equalizeHist(grayimg)# 显示均衡化的图像cv2.imshow('image',dstimg)cv2.waitKey(0)cv2.destroyAllWindows()
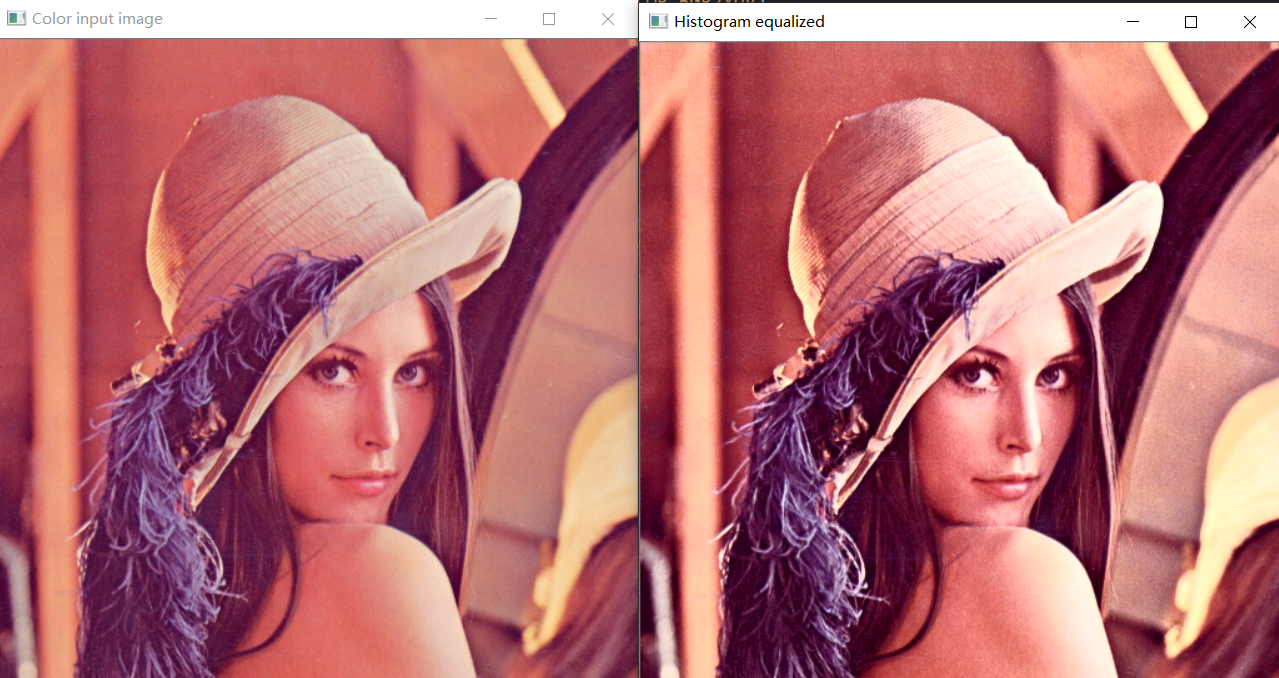
彩色直方图均衡化 - 1
# 图像读取imgname = image_directory + 'lena.jpg'img = cv2.imread(imgname)# Python 中成对使用三个引号,可以写大段的跨行注释"""YUV色彩空间是把亮度(Luma)与色度(Chroma)分离,彩色电视采用的图像表示方法“Y”表示亮度,也就是灰度值“U”表示蓝色通道与亮度的差值“V”表示红色通道与亮度的差值对彩色图像进行直方图均衡化时,先将图像从BGR空间转到YUV空间,然后对亮度Y通道进行直方图均衡化,然后再转换回BGR空间"""img_yuv = cv2.cvtColor(img, cv2.COLOR_BGR2YUV)# equalize the histogram of the Y channelimg_yuv[:,:,0] = cv2.equalizeHist(img_yuv[:,:,0])# convert the YUV image back to RGB formatimg_output = cv2.cvtColor(img_yuv, cv2.COLOR_YUV2BGR)cv2.imshow('Color input image', img)cv2.imshow('Histogram equalized', img_output)cv2.waitKey(0)cv2.destroyAllWindows()
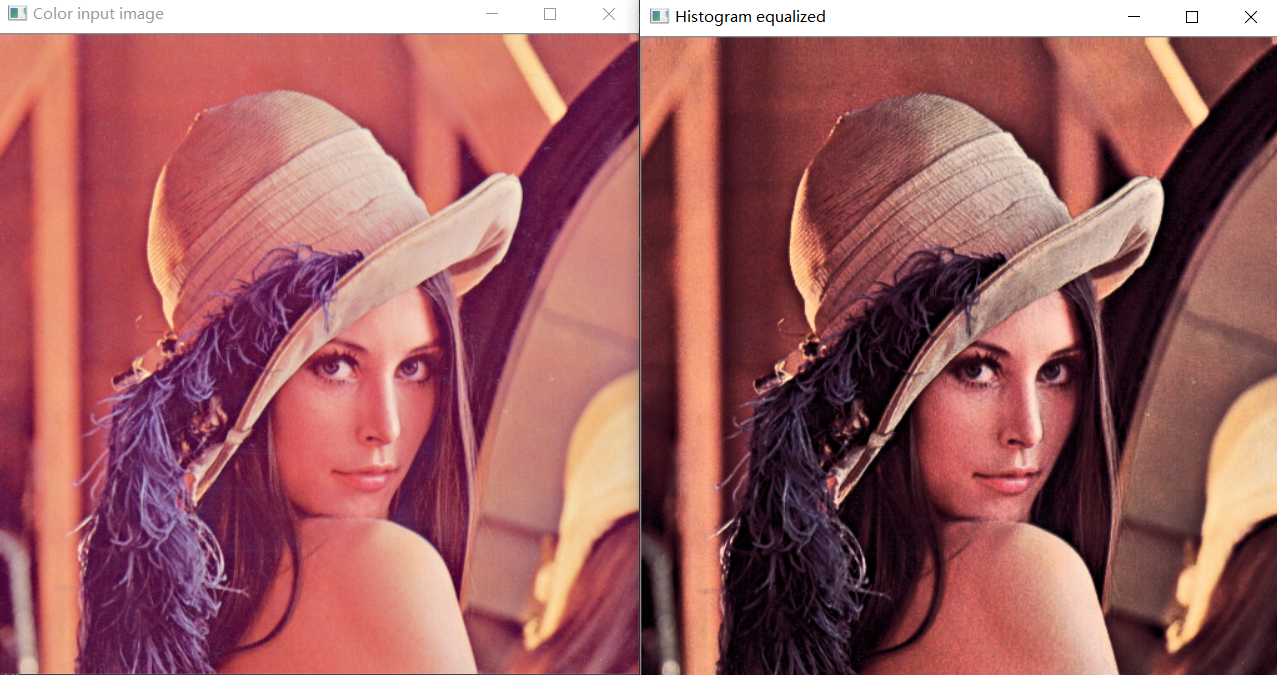
彩色均衡化 - 2
# 图像读取imgname = image_directory + 'lena.jpg'img = cv2.imread(imgname)"""OpenCV 中有HSV空间,和HSI空间比,取值范围不同: 0-180, 0-255, 0-255先转换到HSV空间在V通道进行直方图均衡化再转换回BGR空间"""hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)# equalize the histogram of the V channelhsv[:,:,2] = cv2.equalizeHist(hsv[:,:,2])# convert back to BGRimg_output = cv2.cvtColor(hsv,cv2.COLOR_HSV2BGR)cv2.imshow('Color input image', img)cv2.imshow('Histogram equalized', img_output)cv2.waitKey(0)cv2.destroyAllWindows()
2. 图像平滑
2.1 平均
# 图像读取imgname = image_directory + 'lena.jpg'img = cv2.imread(imgname)# 在5x5模版下进行图像平均, 该模版是 5x5个1,再除以25blur = cv2.blur( img,(5,5))# 显示原图像cv2.imshow('srcimage',img)# 显示结果图像cv2.imshow('resimage',blur)cv2.waitKey(0)cv2.destroyAllWindows()
2.2 高斯滤波
# 图像读取imgname = image_directory + 'lena.jpg'img = cv2.imread(imgname)# 在5x5模版下进行图像平均, 该模版是 5x5个1,再除以25blur = cv2.blur( img,(5,5))# 显示原图像cv2.imshow('srcimage',img)# 显示结果图像cv2.imshow('resimage',blur)cv2.waitKey(0)cv2.destroyAllWindows()
2.3 中值滤波
# 中值滤波, 参数确定模版的大小:5x5blur = cv2.medianBlur(img,5)# 显示原图像cv2.imshow('srcimage',img)# 显示结果图像cv2.imshow('resimage',blur)# 等待按下一个键cv2.waitKey(0)# 模版增大 5-->9blur = cv2.medianBlur(img,9)cv2.imshow('resimage',blur)# 等待按下一个键cv2.waitKey(0)# 模版增大 9-->15blur = cv2.medianBlur(img,15)cv2.imshow('resimage',blur)# 等待按下一个键cv2.waitKey(0)# 关闭所有窗口cv2.destroyAllWindows()
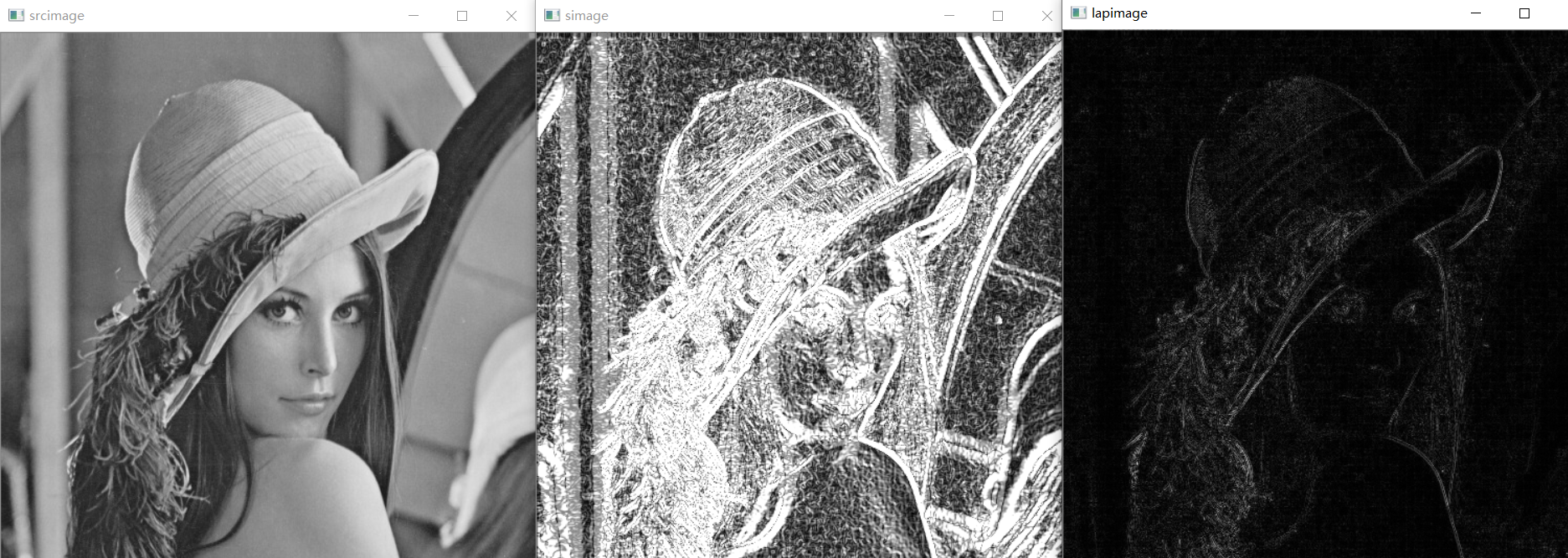
3. 图像梯度
# 图像读取imgname = image_directory + 'lena.jpg'bgrimg = cv2.imread(imgname)img = cv2.cvtColor(bgrimg, cv2.COLOR_BGR2GRAY)# Laplace 算子; 最后一个参数决定图像的深度, -1表示和原图像一样, cv2.CV_64F 64位浮点 cv2.CV_32F 32位浮点laplacian=cv2.Laplacian(img,cv2.CV_64F)# 参数1,0 为只在x方向求一阶导数,最大可以求2 阶导数。sobelx=cv2.Sobel(img,cv2.CV_64F,1,0,ksize=5)# 参数0,1 为只在y方向求一阶导数,最大可以求2 阶导数。sobely=cv2.Sobel(img,cv2.CV_64F,0,1,ksize=5)#转换成uint8abs_lap = cv2.convertScaleAbs( laplacian);abs_sobelx = cv2.convertScaleAbs( sobelx);abs_sobely = cv2.convertScaleAbs( sobely);abs_sobel = cv2.addWeighted( abs_sobelx, 0.5, abs_sobely, 0.5, 0 );# 同时显示原图像和结果图像cv2.imshow('srcimage',img )cv2.imshow('lapimage',abs_lap)cv2.imshow('simage',abs_sobel)cv2.waitKey(0)cv2.destroyAllWindows()
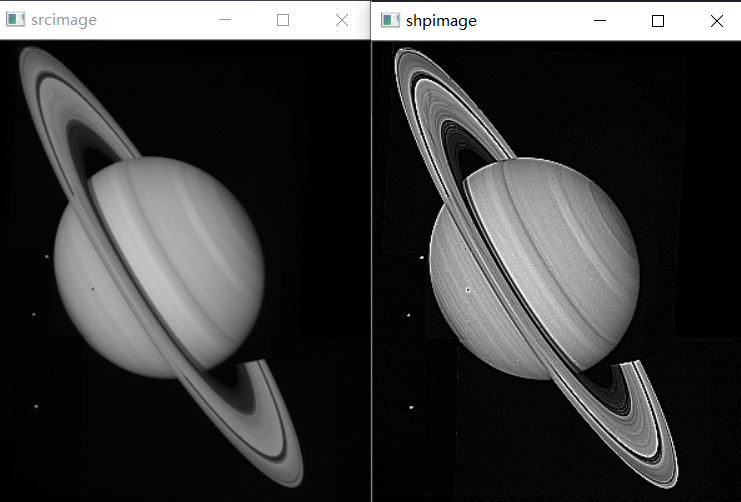
4. 利用相关进行锐化
# 图像读取imgname = image_directory + 'saturn.png'bgrimg = cv2.imread(imgname)img = cv2.cvtColor(bgrimg, cv2.COLOR_BGR2GRAY)# 图像缩小img = cv2.resize(img, (int(img.shape[1]/4), int(img.shape[0]/4)) )# 定义模板kernel = np.array([[0,-1,0],[-1,5,-1],[0,-1,0]])# 空域相关操作进行滤波sharpened = cv2.filter2D(img, -1, kernel)cv2.imshow('srcimage',img )cv2.imshow('shpimage',sharpened)cv2.waitKey(0)cv2.destroyAllWindows()
# 图像读取imgname = image_directory + 'saturn.png'bgrimg = cv2.imread(imgname)img = cv2.cvtColor(bgrimg, cv2.COLOR_BGR2GRAY)# 图像缩小img = cv2.resize(img, (int(img.shape[1]/4), int(img.shape[0]/4)) )# 定义模板kernel = np.array([[0,-1,0],[-1,5,-1],[0,-1,0]])# 空域相关操作进行滤波sharpened = cv2.filter2D(img, -1, kernel)cv2.imshow('srcimage',img )cv2.imshow('shpimage',sharpened)cv2.waitKey(0)cv2.destroyAllWindows()
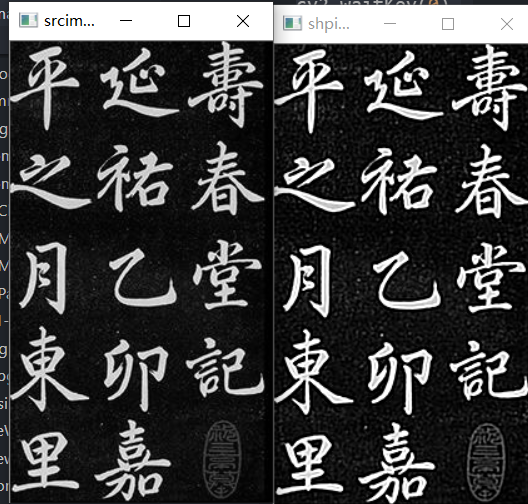
# 图像读取imgname = image_directory + 'word.png'bgrimg = cv2.imread(imgname)img = cv2.cvtColor(bgrimg, cv2.COLOR_BGR2GRAY)# 定义模板kernel = np.array([[-1,-1,-1,-1,-1],[-1, 2, 2, 2,-1],[-1, 2, 8, 2,-1],[-1, 2, 2, 2,-1],[-1,-1,-1,-1,-1]]) / 8.0# 空域相关操作进行滤波sharpened = cv2.filter2D(img, -1, kernel)cv2.imshow('srcimage',img )cv2.imshow('shpimage',sharpened)cv2.waitKey(0)cv2.destroyAllWindows()
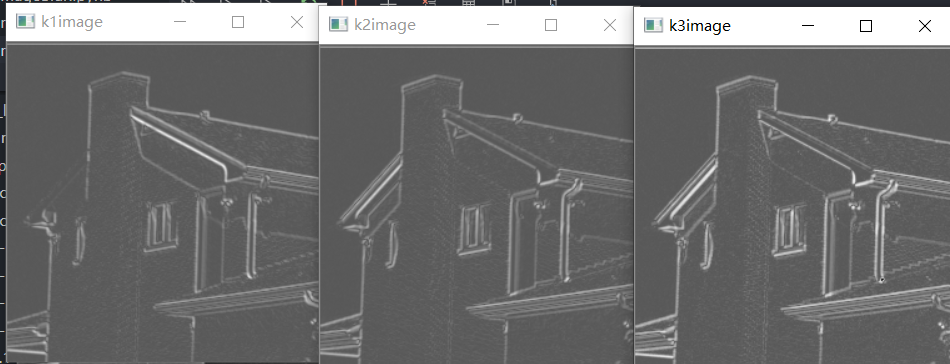
5. 利用相关进行滤波,检测不同的边
# 图像读取imgname = image_directory + 'House.tiff'bgrimg = cv2.imread(imgname)img = cv2.cvtColor(bgrimg, cv2.COLOR_BGR2GRAY)# 定义模板kernel_emboss_1 = np.array([[0,-1,-1],[1,0,-1],[1,1,0]])/3.0kernel_emboss_2 = np.array([[-1,-1,0],[-1,0,1],[0,1,1]])/3.0kernel_emboss_3 = np.array([[1,0,0],[0,0,0],[0,0,-1]])# 空域滤波k1 = cv2.filter2D(img, cv2.CV_32F, kernel_emboss_1)k2 = cv2.filter2D(img, cv2.CV_32F, kernel_emboss_2)k3 = cv2.filter2D(img, cv2.CV_32F, kernel_emboss_3)absk1 = cv2.convertScaleAbs( k1)+88absk2 = cv2.convertScaleAbs( k2)+88absk3 = cv2.convertScaleAbs( k3)+88cv2.imshow('srcimage',img )cv2.imshow('k1image',absk1)cv2.imshow('k2image',absk2)cv2.imshow('k3image',absk3)cv2.waitKey(0)cv2.destroyAllWindows()
知识点
3.1 背景知识
3.2基本灰度变换
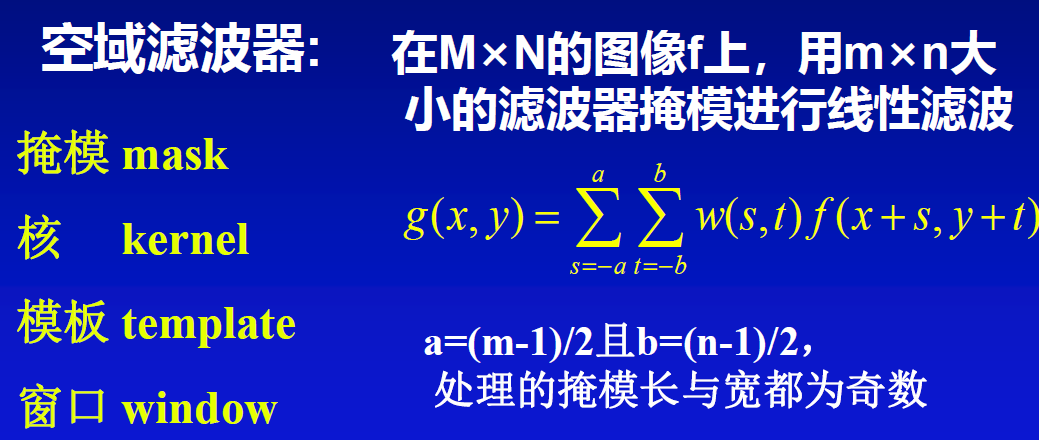
空域滤波过程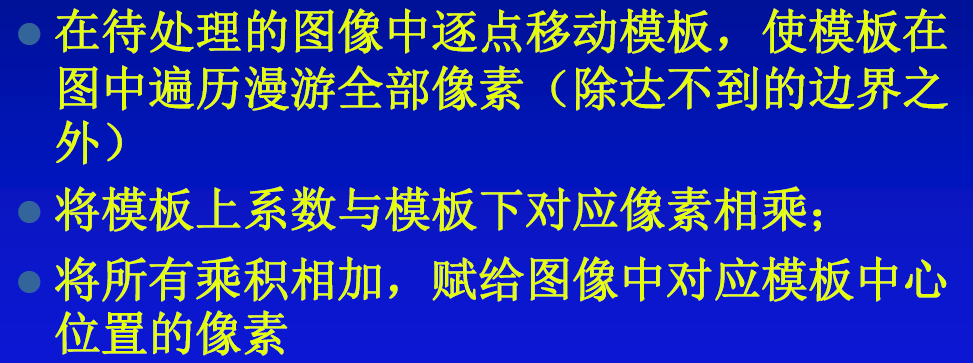
- 平滑空间滤波器
- 目的:消除噪声、 去除太小的细节或将目标内的小间断连接起来实现模糊
- 方法:
- 平均
- 邻域平均法
- 加权邻域平均法
- 阈值邻域平均法
- 中值滤波
- 用一个含有奇数点的滑动窗口,将邻域中的像素按灰度级排序,取其中间值为输出像素
- 抑制图像随机脉冲噪声的同时不使边缘模糊。但对于线、尖顶等细节多的图像不宜采用中值滤波。
- 运算速度快,便于实时处理
- 图像锐化
- 边缘检测:
- 步骤:滤波、增强、检测
- Marr算法
- Canny边缘检测
- 边缘检测评价
- 平均
课件

若有收获,就点个赞吧
0 人点赞
