
传感器接口
车载以太网(车载Ethernet)
接口类型
车载以太网一般都基本采用带T1的标准,使用一对双绞线共两根线进行数据传输
1000BASE-T主要采用PAM5的编码方式,
车载以太网100BASE-T1和1000BASE-T1主要采用PAM3的编码方式。
100BASE-T1
物理连接上使用了一对双绞线实现全双工的信息传输。
100BASE-T1利用所谓的回音消除技术(echo cancell ation)实现了在一对双绞线上的全双工通信。
回音消除技术的主要原理:作为发送方的节点将自己要发送的差分电压加载到双绞线上,而作为接收者的节点则将双绞线上的总电压减去自己发出去的电压做减法得到的结果就是发送节点发送的电压。
100BASE-TX
1000BASE-T1
1000BASE-T
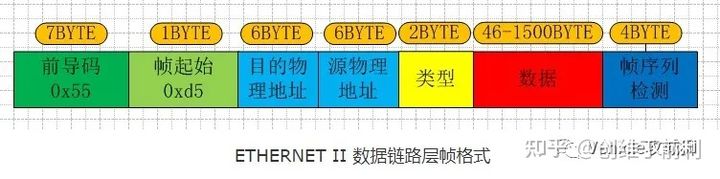
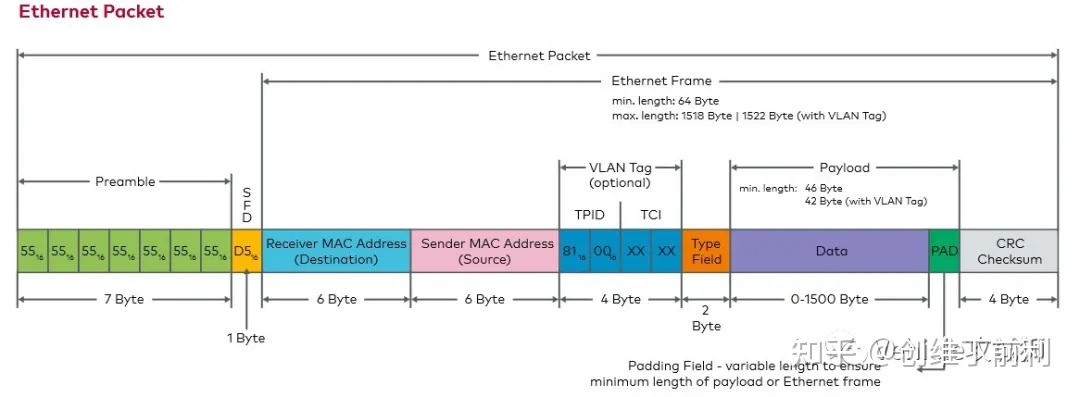
车载以太网帧结构
CAN/CAN-FD
- CAN 是Controller Area Network 的缩写(以下称为CAN),是ISO国际标准化的串行通信协议。
- CAN 的高性能和可靠性已被认同,并被广泛地应用于工业自动化、船舶、医疗设备、工业设备等方面。现场总线是当今自动化领域技术发展的热点之一,被誉为自动化领域的计算机局域网。
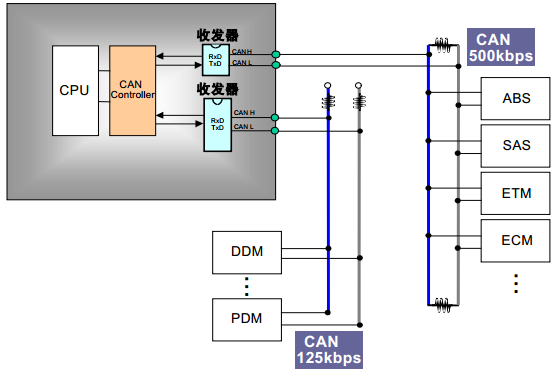
- 汽车上的CAN连接图:
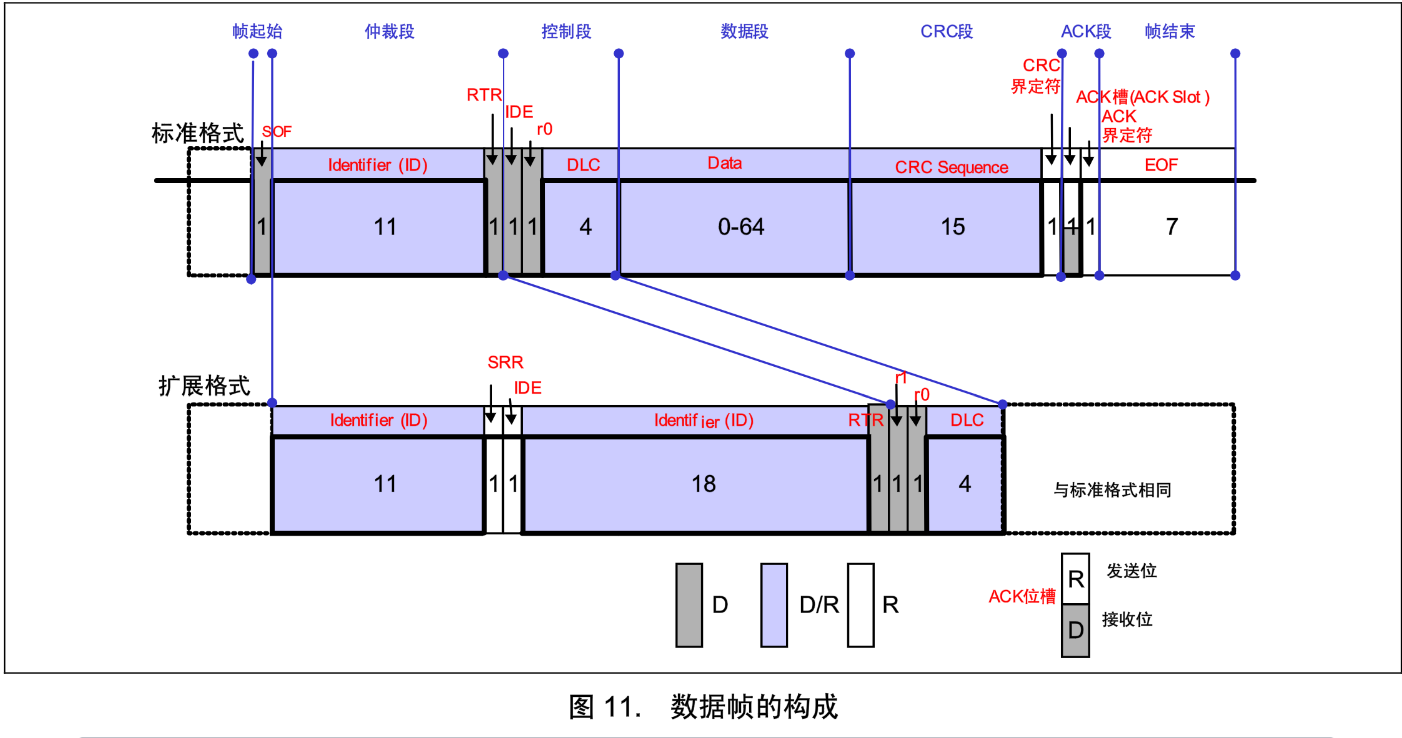
- 数据帧格式
8.17电控培训 软硬件体系和KEIL · 哈工大威海创新平台
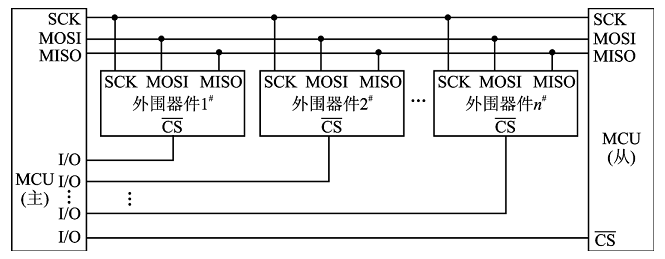
SPI
- SPI是串行外设接口(Serial Peripheral Interface)的缩写。
- SPI,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间
- 拓扑图:
传感器标定
传感器同步
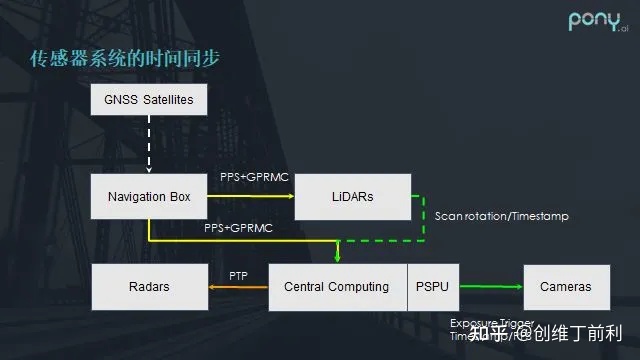
时间硬同步
基于GPS的PPS+NMEA
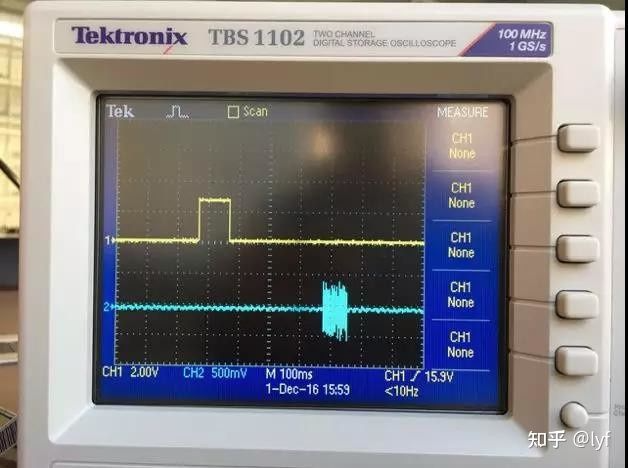
第一条线叫PPS信号(Pulse Per Second), 也就是每秒一个脉冲
PPS信号的呈现五花八门,有上升沿有效的,有下降沿有效的,有3.3V的5V的,也有-3.3V和-5V的,占空比多大的都有。
Velodyne激光雷达对PPS的要求:默认低电平,拉高高电平时,上升沿有效,+3.3v或+5v均可,脉宽要控制在10微秒-200毫秒之间,也就是占空比要在20%以下;
第二条线是输出GPRMC信号,这条线,要满足RS232电平标准。
GPRMC信号要跟在PPS信号后面,也是一秒一个,很多GNSS默认是0.2秒一个,要注意修改,另外,GPRMC信号的末尾离下一个PPS的上升沿,至少要隔开300毫秒。我们一般这样建议,一个PPS上升沿后,过300毫秒,开始输出GPRMC信号,这个是比较理想的。
不知道你注意到没有,GPRMC的NMEA语句,仅仅精确到秒(以pre-2.3版本为例)
$GPRMC,123519,A,4807.038,N,01131.000,E,022.4,084.4,230394,003.1,W*6A
基于以太网的IEEE 1588时钟同步协议(PTP)。
时间软同步
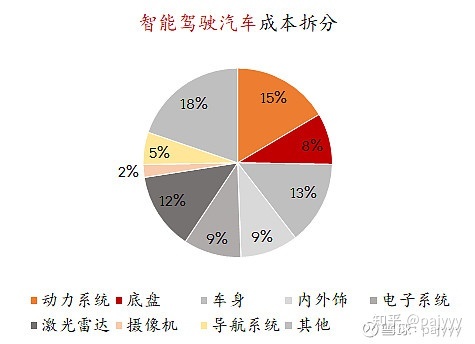
成本
参考资料

若有收获,就点个赞吧
0 人点赞
