标定板
棋盘格?圆点?怎么选?
棋盘格:角点检测不准,投影中心不变
圆点、圆点:圆心检测更准,投影中心变化(像平面上椭圆的中心 不是 空间圆中心 在像平面上 的真正投影中心)
标定板生成器:
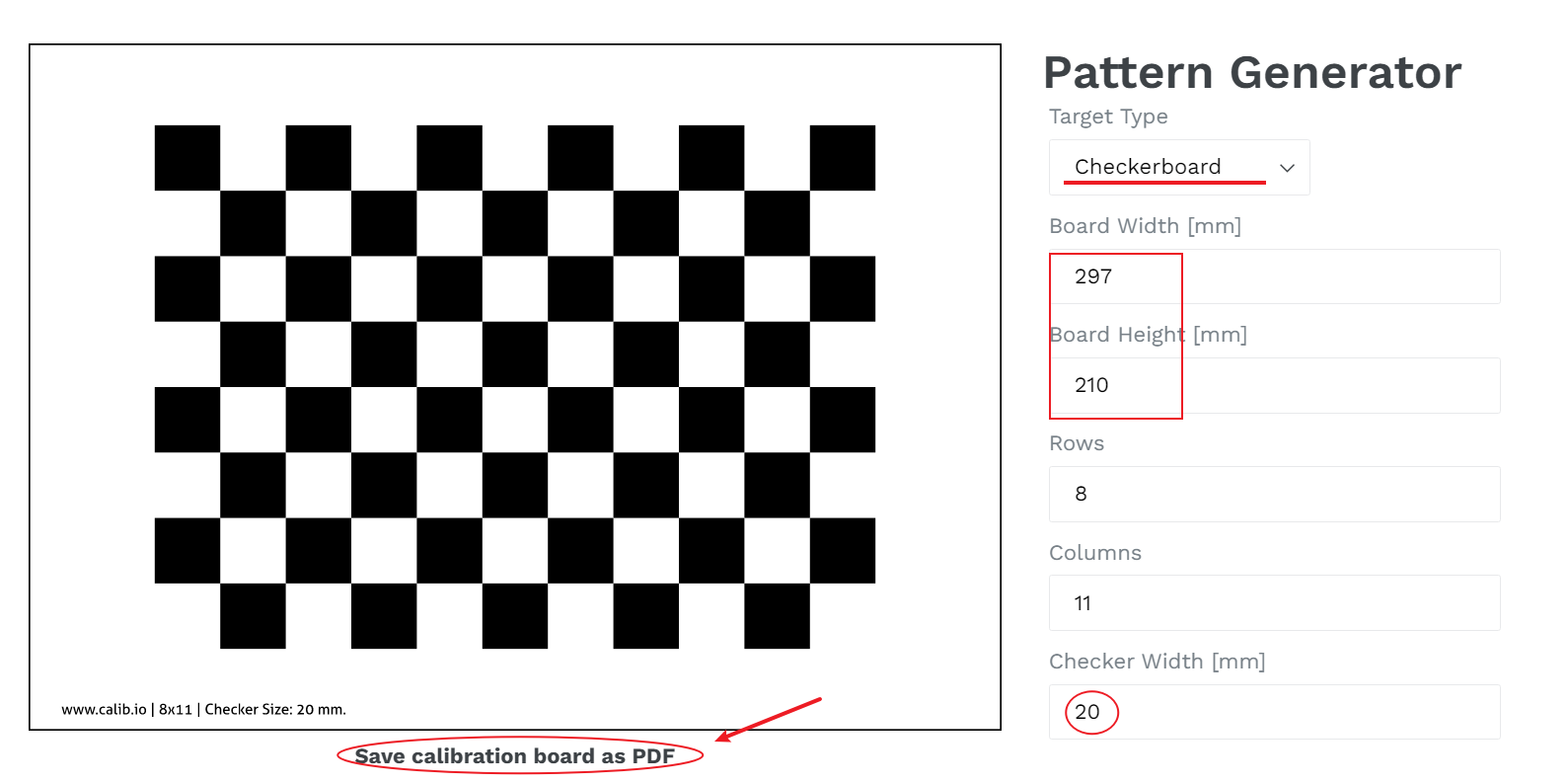
※※※注意:
打印时选实际大小
calib.io_checker_297x210_8x11_20.pdf
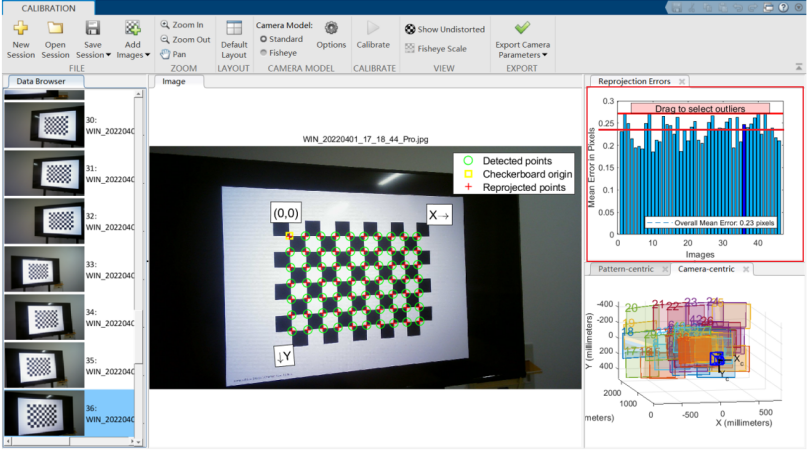
MATLAB相机标定
使用相机标定工具箱
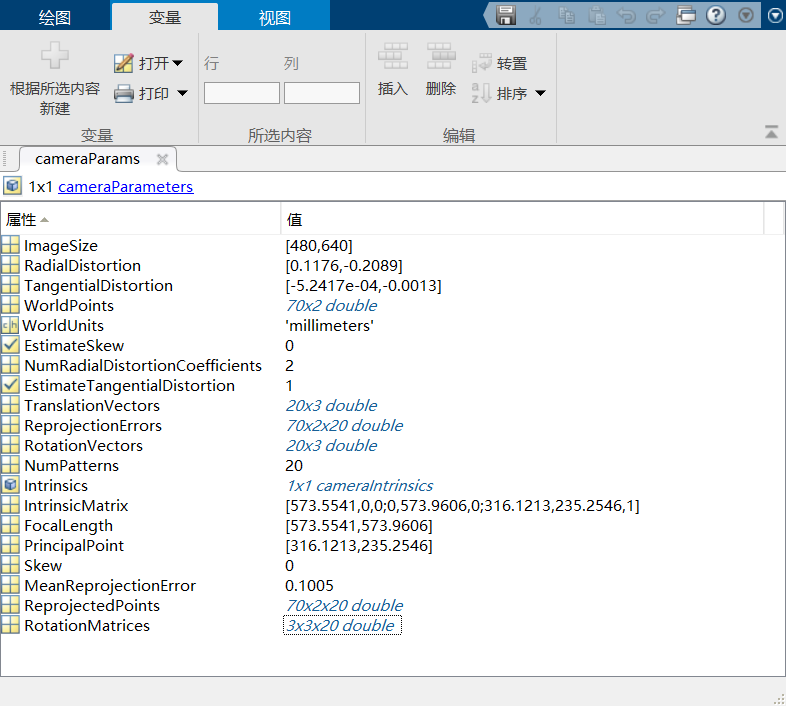
保定结果:
1920*1080
2022.4.3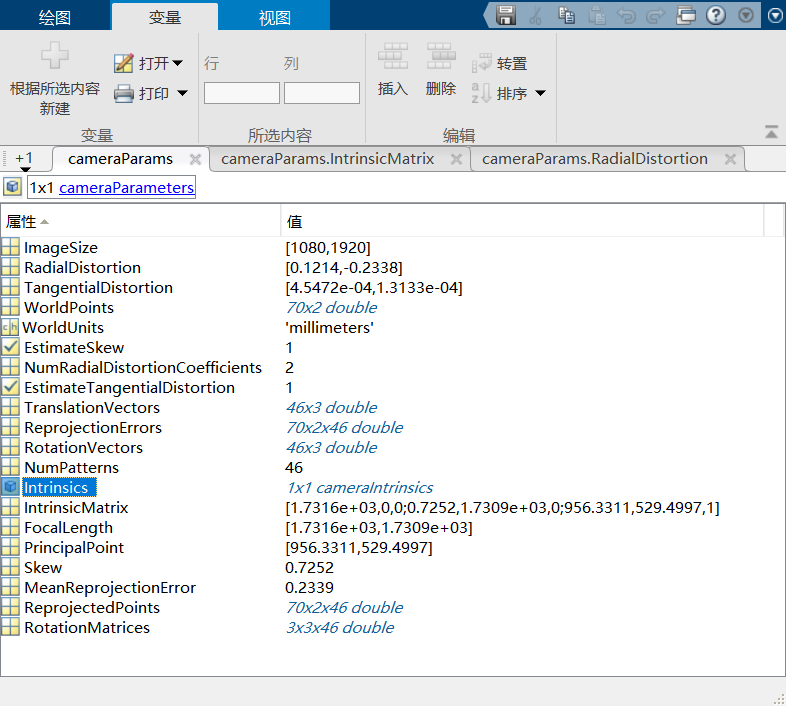
- IntrinsicMatrix对应内参矩阵K,注意这个和OpenCV中是转置的关系
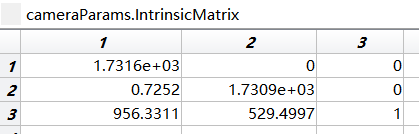
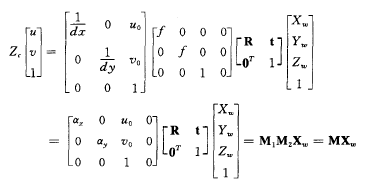
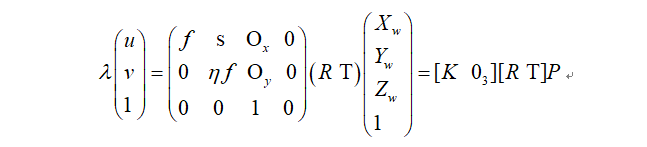
fx、fy 分别为相机在x、y轴方向上的归一化焦距,单位为像素
- RadialDistortion对应k1和k2,k3设置为0了。 TangentialDistortion对应p1,p2。

- focal_length为归一化焦距
更新:查阅资料,ar0330摄像头,像元尺寸2.2um,猜测镜头焦距为1731x2.2=3808.2≈3.8mm
573x2.2x3=3782≈3.8mm
640*480
2022.4.5
linux 下使用uvc摄像头:
#安装工具guvcviewsudo apt-get install guvcview#测试摄像头guvcview
切换相机:
参考:https://www.ncnynl.com/archives/201706/1772.html
ros camera calibration
rosrun camera_calibration cameracalibrator.py —size 11x8 —square 0.03 image:=/camera/rgb/image_raw 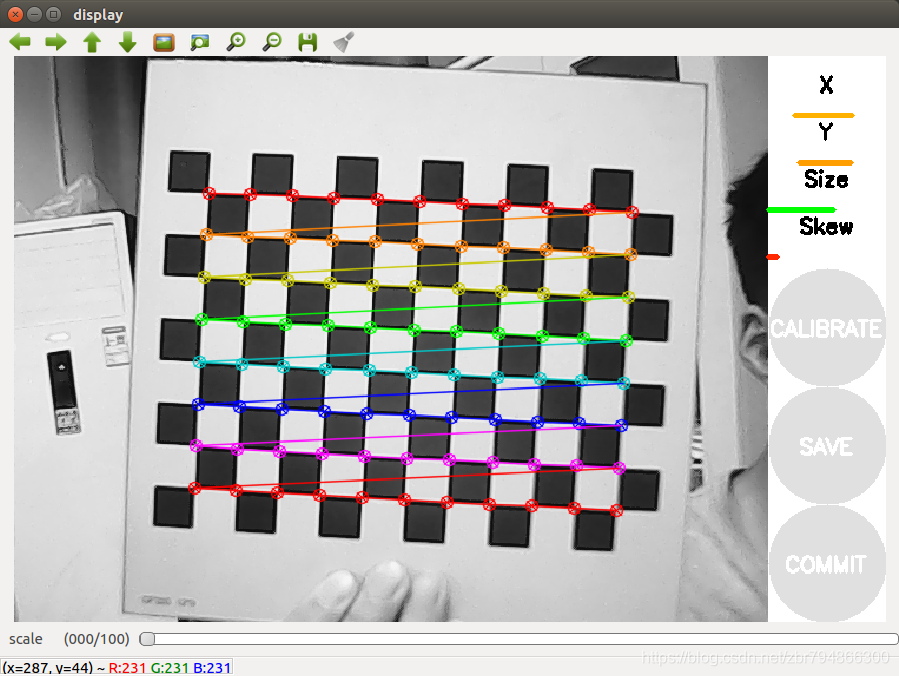
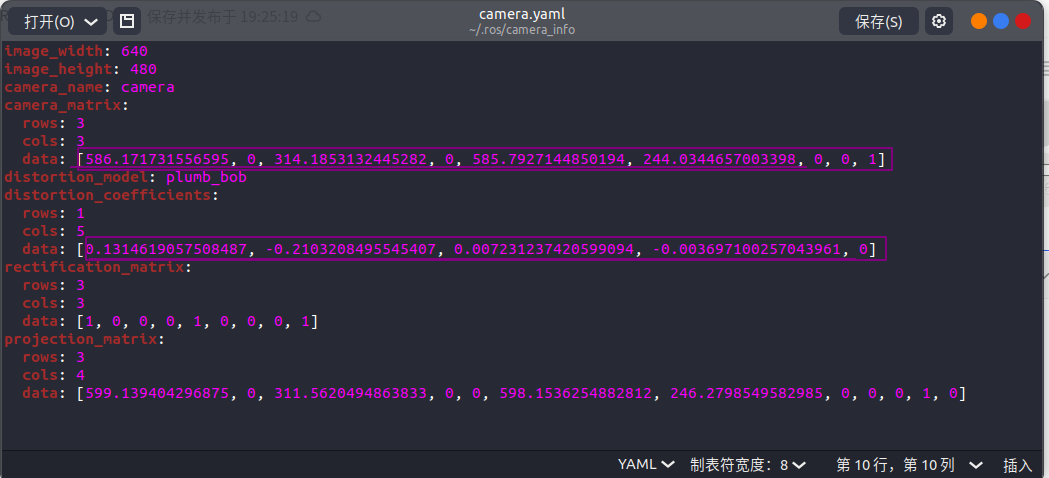
image_width: 640image_height: 480camera_name: cameracamera_matrix:rows: 3cols: 3data: [586.171731556595, 0, 314.1853132445282, 0, 585.7927144850194, 244.0344657003398, 0, 0, 1]distortion_model: plumb_bobdistortion_coefficients:rows: 1cols: 5data: [0.1314619057508487, -0.2103208495545407, 0.007231237420599094, -0.003697100257043961, 0]rectification_matrix:rows: 3cols: 3data: [1, 0, 0, 0, 1, 0, 0, 0, 1]projection_matrix:rows: 3cols: 4data: [599.139404296875, 0, 311.5620494863833, 0, 0, 598.1536254882812, 246.2798549582985, 0, 0, 0, 1, 0]

若有收获,就点个赞吧
0 人点赞
