前视
采埃孚(ZF)的前视三目摄像头(S-Cam4)产品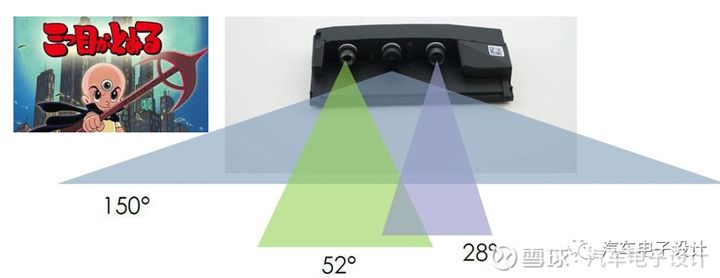

3个前视相机通过硬线接口连接在电路板上,通过ISP算法得出人类可感知的图像,再通过MOBILEYE EYE Q4芯片对图像进行处理,得出感知系统的计算结果,输出给下游算法模块。
HFOV 28°的窄视角相机,能够识别到前方260m的车辆,主要用于Highway场景的远处车辆识别;
HFOV 52°相机一般是主相机,需要感知的前向目标大都需要这个相机来检测;
HFOV 150°相机叫做广角相机,主要用于路口场景横向目标检测;
环视摄像头,
红外相机
参数指标
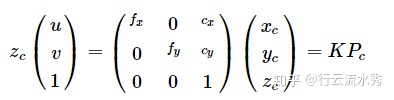
内参
内参矩阵K
opencv1里的说内参数是4个其为fx、fy、u0、v0
相机坐标系 到像素坐标系
到像素坐标系
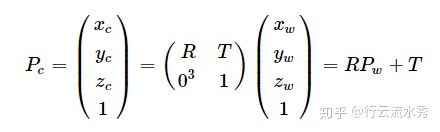
外参
畸变系数
相机标定
成本
摄像头的成本确实非常非常低。一般也就20-30美金左右,当然双目摄像头成本会贵一些。
供应商

若有收获,就点个赞吧
0 人点赞
