使用 OpenCV 进行汽车追踪
在本教程中,我们将研究使用 haar 特征的车辆跟踪。 我们有一个经过训练的 haar 级联文件。
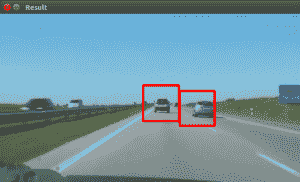
该程序将检测感兴趣的区域,将其分类为汽车,并在其周围显示矩形。
级联检测
让我们从基本的级联检测程序开始:
#! /usr/bin/pythonimport cv2face_cascade = cv2.CascadeClassifier('cars.xml')vc = cv2.VideoCapture('road.avi')if vc.isOpened():rval , frame = vc.read()else:rval = Falsewhile rval:rval, frame = vc.read()# car detection.cars = face_cascade.detectMultiScale(frame, 1.1, 2)ncars = 0for (x,y,w,h) in cars:cv2.rectangle(frame,(x,y),(x+w,y+h),(0,0,255),2)ncars = ncars + 1# show resultcv2.imshow("Result",frame)cv2.waitKey(1);vc.release()
这样既可以检测屏幕中的汽车,也可以检测到噪声,并且屏幕有时会抖动。 为了避免所有这些情况,我们必须改进我们的汽车跟踪算法。 我们决定提出一个简单的解决方案。
汽车追踪算法
对于每一帧:
- 检测潜在的感兴趣区域
- 根据垂直,水平相似度过滤检测到的区域
- 如果是新区域,请添加到集合中
- 每 30 帧清除一次收藏
消除误报
均方误差函数用于消除误报。 我们比较图像的垂直和水平方向。 如果差异大或小,就不能成为汽车。
ROI 检测
可能无法在每帧中检测到汽车。 如果检测到新车,则将其添加到集合中。
我们将这个集合保留 30 帧,然后清除它。
#!/usr/bin/pythonimport cv2import numpy as npdef diffUpDown(img):# compare top and bottom size of the image# 1\. cut image in two# 2\. flip the top side# 3\. resize to same size# 4\. compare differenceheight, width, depth = img.shapehalf = height/2top = img[0:half, 0:width]bottom = img[half:half+half, 0:width]top = cv2.flip(top,1)bottom = cv2.resize(bottom, (32, 64))top = cv2.resize(top, (32, 64))return ( mse(top,bottom) )def diffLeftRight(img):# compare left and right size of the image# 1\. cut image in two# 2\. flip the right side# 3\. resize to same size# 4\. compare differenceheight, width, depth = img.shapehalf = width/2left = img[0:height, 0:half]right = img[0:height, half:half + half-1]right = cv2.flip(right,1)left = cv2.resize(left, (32, 64))right = cv2.resize(right, (32, 64))return ( mse(left,right) )def mse(imageA, imageB):err = np.sum((imageA.astype("float") - imageB.astype("float")) ** 2)err /= float(imageA.shape[0] * imageA.shape[1])return errdef isNewRoi(rx,ry,rw,rh,rectangles):for r in rectangles:if abs(r[0] - rx) < 40 and abs(r[1] - ry) < 40:return Falsereturn Truedef detectRegionsOfInterest(frame, cascade):scaleDown = 2frameHeight, frameWidth, fdepth = frame.shape# Resizeframe = cv2.resize(frame, (frameWidth/scaleDown, frameHeight/scaleDown))frameHeight, frameWidth, fdepth = frame.shape# haar detection.cars = cascade.detectMultiScale(frame, 1.2, 1)newRegions = []minY = int(frameHeight*0.3)# iterate regions of interestfor (x,y,w,h) in cars:roi = [x,y,w,h]roiImage = frame[y:y+h, x:x+w]carWidth = roiImage.shape[0]if y > minY:diffX = diffLeftRight(roiImage)diffY = round(diffUpDown(roiImage))if diffX > 1600 and diffX < 3000 and diffY > 12000:rx,ry,rw,rh = roinewRegions.append( [rx*scaleDown,ry*scaleDown,rw*scaleDown,rh*scaleDown] )return newRegionsdef detectCars(filename):rectangles = []cascade = cv2.CascadeClassifier('cars.xml')vc = cv2.VideoCapture(filename)if vc.isOpened():rval , frame = vc.read()else:rval = Falseroi = [0,0,0,0]frameCount = 0while rval:rval, frame = vc.read()frameHeight, frameWidth, fdepth = frame.shapenewRegions = detectRegionsOfInterest(frame, cascade)for region in newRegions:if isNewRoi(region[0],region[1],region[2],region[3],rectangles):rectangles.append(region)for r in rectangles:cv2.rectangle(frame,(r[0],r[1]),(r[0]+r[2],r[1]+r[3]),(0,0,255),3)frameCount = frameCount + 1if frameCount > 30:frameCount = 0rectangles = []# show resultcv2.imshow("Result",frame)cv2.waitKey(1);vc.release()detectCars('road.avi')
最后说明
级联不是旋转不变的,比例尺和平移的不变。 此外,检测具有 Haar 级联的车辆可能会相当不错,但是使用其他算法(显着点)也会有所收获。
您可能会喜欢:

若有收获,就点个赞吧
0 人点赞
