自动驾驶拓展小车自带两路巡线传感器,位于小车万向轮前面两侧位置,两路巡线传感器间距为:13.1mm,详见下图:
上图中单位为:毫米(mm)
巡线传感器相关积木
- “获取(左侧/右侧)循迹传感器的值“(椭圆形输入积木)

巡线传感器的读值范围受外部环境影响而不同,此处给出一个办公室环境下,测量 NOC 丝路智能驾驶赛参地图中,白色背景和黑色主线路的参考值。
| 测量目标 | 巡线传感器(小车前进时) | 测量值(仅供参考) |
|---|---|---|
| 白色背景 | 左路巡线传感器 | 157 |
| 右路巡线传感器 | 197 | |
| 黑色路线 | 左路巡线传感器 | 2551 |
| 右路巡线传感器 | 2542 |
- “(左侧/右侧)循迹传感器检测到(黑色/白色)?”(菱形布尔积木)

下面是使用两路巡线传感器进行巡线的示例程序: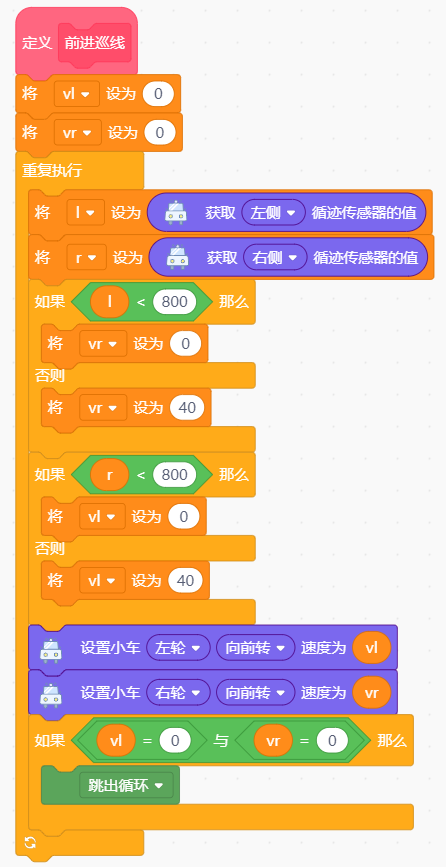

若有收获,就点个赞吧
0 人点赞
