线性结构难以胜任既要求对象集合的组成可以高效率地动态调整,同时也要求能够高效率地查找。
1. 查找
1.1 循关键码访问
与此前的“循秩访问” 和“循位置访问” 等完全不同, 这一新的访问方式, 与数据对象的物理位置或逻辑次序均无关。实际上,查找的过程与结果,仅仅取决于目标对象的关键码,故这种方式亦称作循关键码访问。如:根据身份证号查找特定公民,根据车牌号查找特定车辆。
2. 二叉搜索树
2.1 顺序性
任一节点r的左子树中,所有节点均不大于r。
任一节点r的右子树中,所有节点均不小于r。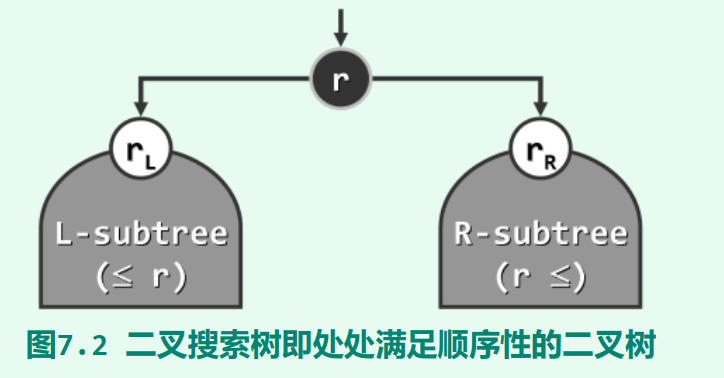
2.2 中序遍历序列
任何一棵二叉树是二叉搜索树,当且仅当其中序遍历序列单调非降。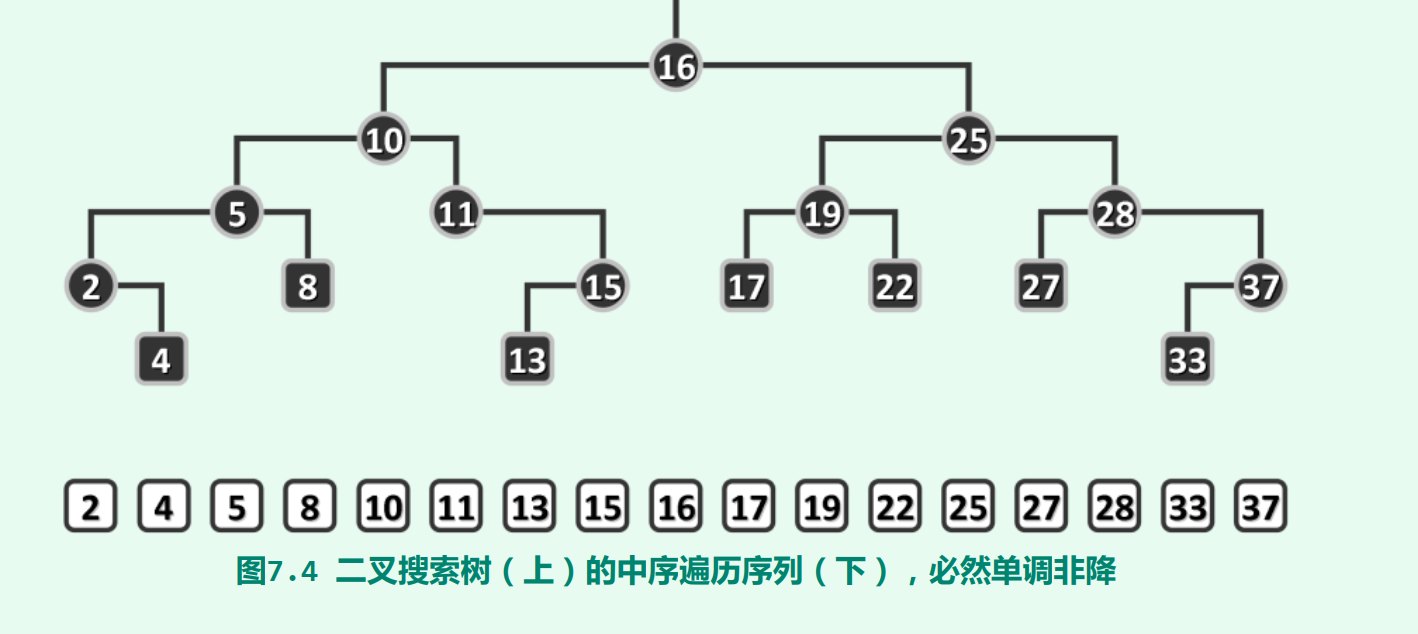
2.3 BST模版类
2.4 查找算法及其实现
从树根出发,逐步地缩小查找范围,直到发现目标(成功)或缩小至空树(失败)。
2.5 插入算法及其实现
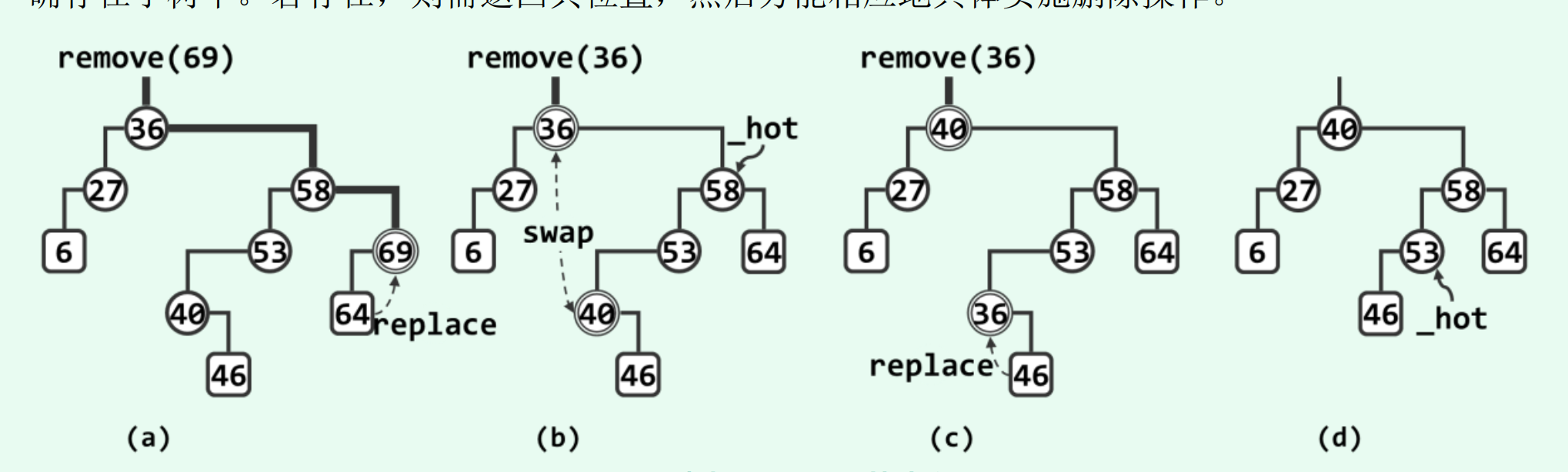
2.6 删除算法及其实现
3. 平衡二叉树
3.1 树高与性能
二叉搜索树中的查找、插入、删除等主要接口的运行时间,均线性正比于二叉搜索树的高度。在最坏情况下, 二叉搜索树可能彻底地退化为列表。
3.2 理想平衡与适度平衡
3.3 等价变换
3.3.1 等价二叉树搜索树
若两棵二叉搜索树的中序遍历序列相同,则称它们彼此等价;反之亦然。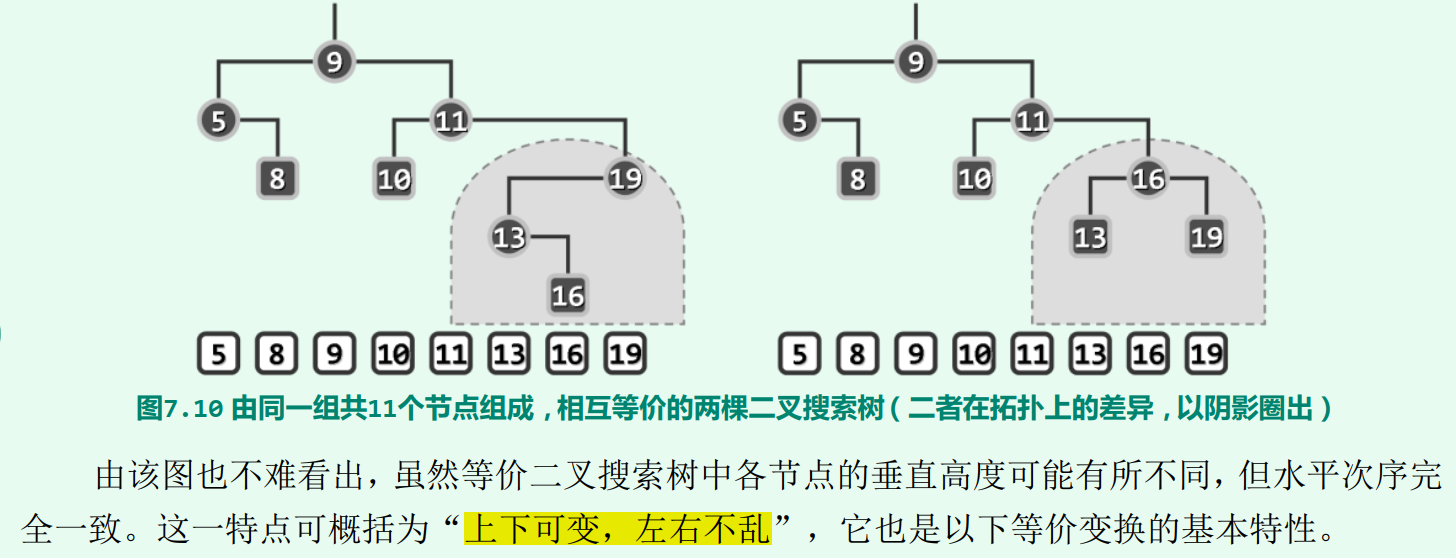
3.3.1 局部性
平衡二叉搜索树的适度平衡性,都是通过对树中每一局部增加某种限制条件来保证的。通常具有如下局部性:
3.4 旋转调整
旋转有两个主要的属性:旋转轴和旋转方向。
旋转轴:旋转轴即是原最小树经过旋转修正后的符合AVL的最小树的根节点。
旋转轴的确定:单旋转为不满足AVL条件的最小的树根的相应孩子节点,多旋转为不满足AVL条件的最小树根的相应孙子节点。
最基本的修复手段,就是通过围绕特定节点的旋转,实现等价前提下的局部拓扑调整。
3.4.1 左旋(zag)逆时针操作
将节点v的右子节点c”往上提”,节点v和v的左子树成为c的左子树,节点c原来的左子树成为节点v的右子树。
3.4.2 右旋(zig)顺时针操作
将节点v的左子节点c”往上提”,节点v和v的右子树成为c的右子树,节点c原来的右子树成为节点v的左子树。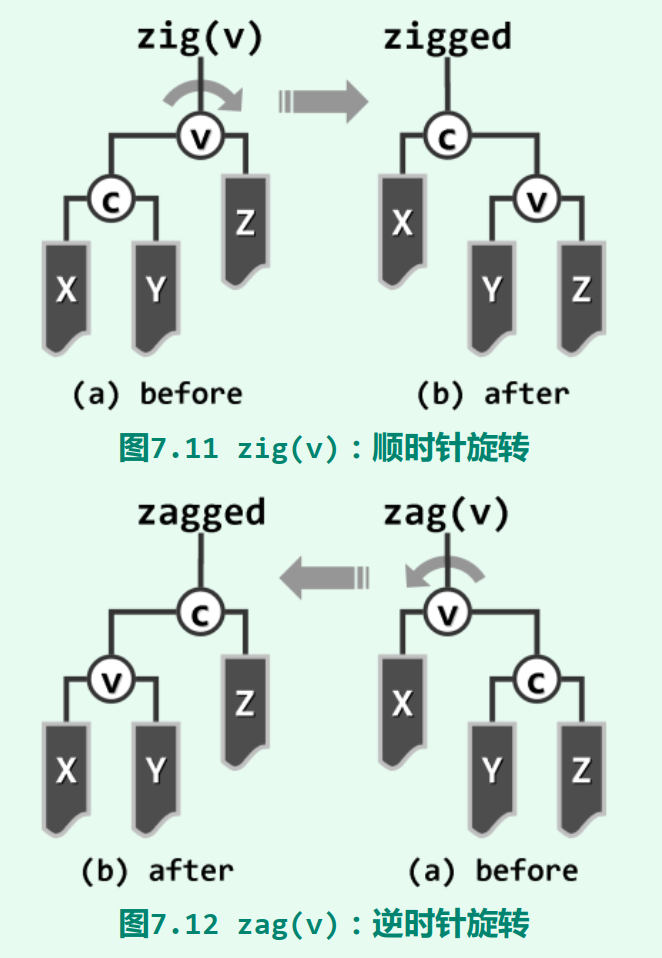
就与树相关的指标而言,经一次zig或zag旋转之后,节点v的深度加一,节点c的深度减一,这一局部子树(乃至全树) 的高度可能发生变化,但上、下幅度均不超过一层。
3.4.3 什么时候需要单旋转,什么时候需要多旋转
节点的插入有以下情形:
- 对α的左儿子的左子树进行一次插入。
- 对α的左儿子的右子树进行一次插入。
- 对α的右儿子的左子树进行一次插入。
- 对α的右儿子的右子树进行一次插入。
4. AVL树
自平衡二叉搜索树,在渐进意义下, AVL树可始终将其高度控制在O(logn)以内,从而保证每次查找、插入或删除操作, 均可在O(logn)的时间内完成。
特点:兄弟节点的高度相差不超过1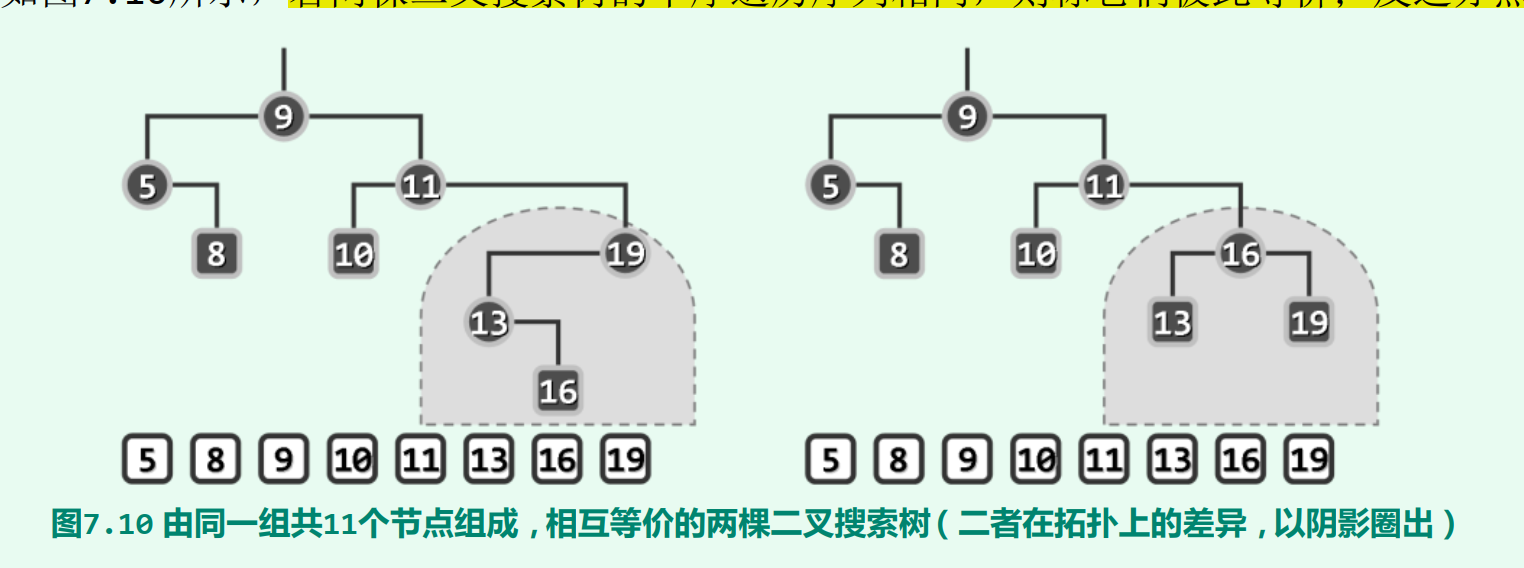
4.1 定义及性质
4.1.1 平衡因子
任一节点v的平衡因子( balance factor) 定义为“其左、右子树的高度差” 。空树高度为-1,单节点子树的高度为0。所谓AVL树,即平衡因子受限的二叉搜索树,其中各节点平衡因子的绝对值均不超过1
4.1.2 平衡性
在完全二叉树中各节点的平衡因子非0即1,故完全二叉树必是AVL树。
4.1.3 失衡与重平衡
AVL树与常规的二叉搜索树一样,也应支持插入、删除等动态修改操作。 但经过这类操作之后,节点的高度可能发生变化,以致于不再满足AVL树的条件。
如此因节点x的插入或删除而暂时失衡的节点,构成失衡节点集,记作UT(x)。 请注意,若x为被摘除的节点,则UT(x)仅含单个节点;但若x为被引入的节点,则UT(x)可能包含多个节点。
4.2 节点插入
在AVL树中插入新节点后,仅需不超过两次旋转, 即可使整树恢复平衡。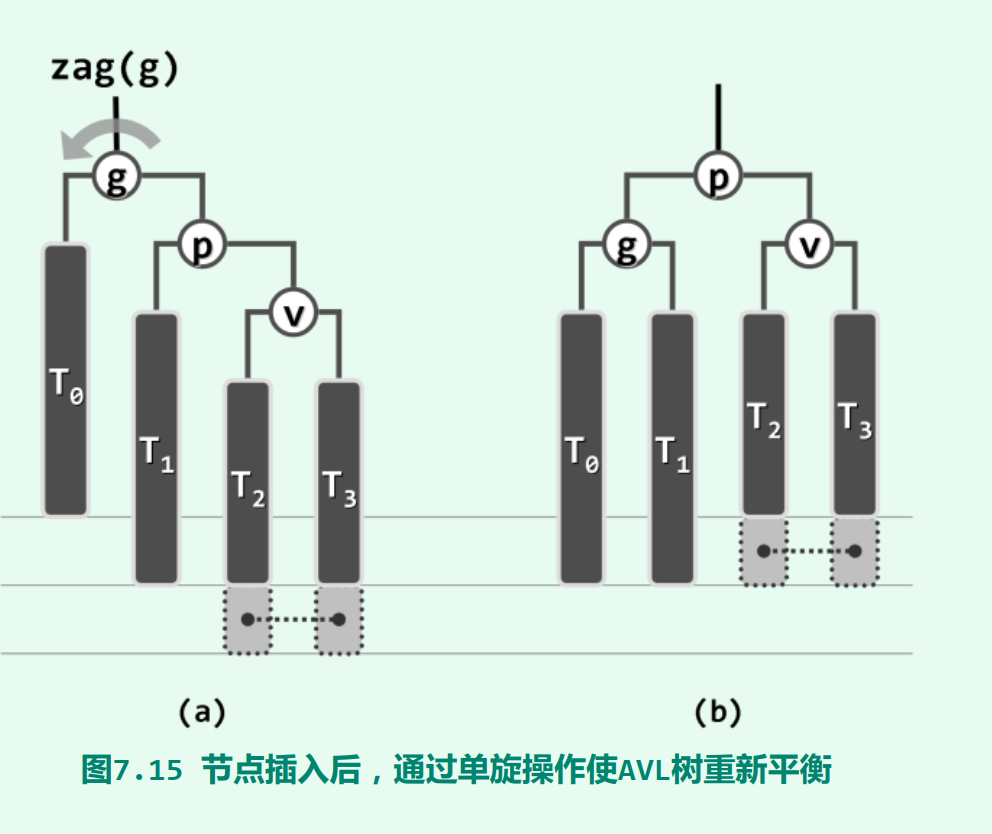
4.2.1 单旋
1:右旋(zig)顺时针操作 (左子树>右子树)
假设以下节点3是新插入的节点,那么树的平衡性就被打破了。找离新插入的节点最近的不平衡的树进行调整,节点7的左子树的高度比右子树的高度大2,所以需要对节点7进行右旋zig顺时针操纵。因为节点7的左子树高度更高,所以需要向上提高一下降低高度。节点5变成了轴点,节点7围着节点5进行zig操作。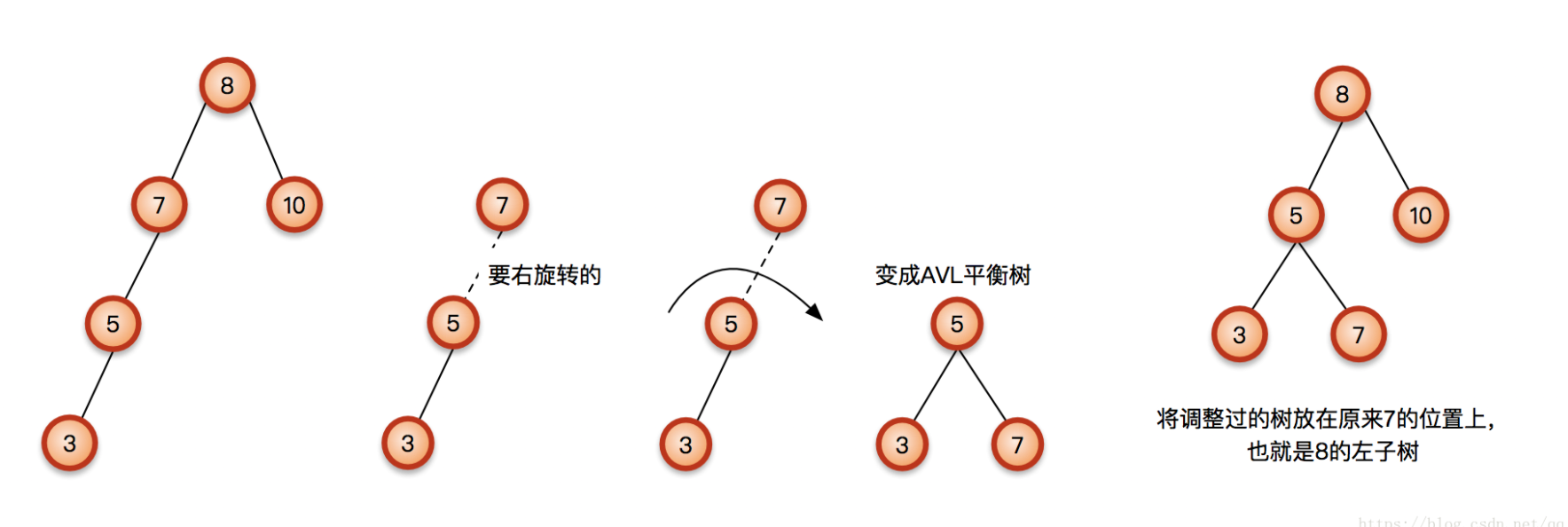
那如果节点5本来就有了右子树呢?照样右旋转,只要把原来5的右子树变成旋转后的7的左子树就行了。因为5的右子树肯定比5大,但是也肯定比7小的。(备注:下面这张图需要进行双旋操作)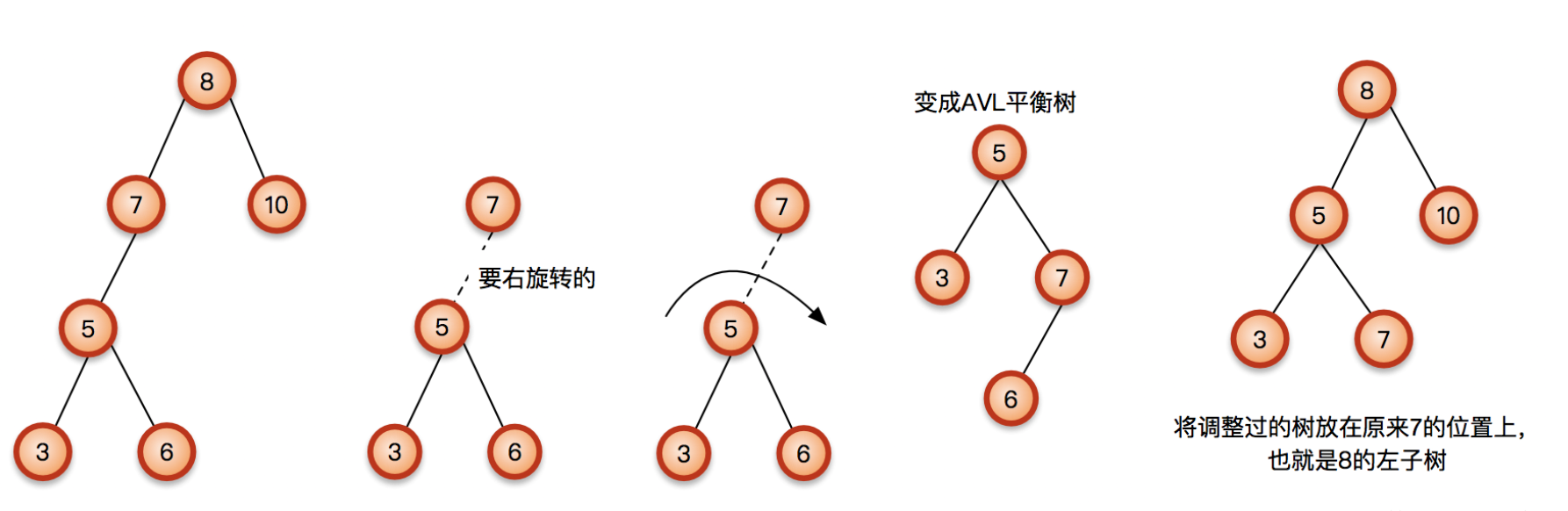
1:左旋(zag)逆时针操作 (右子树>左子树)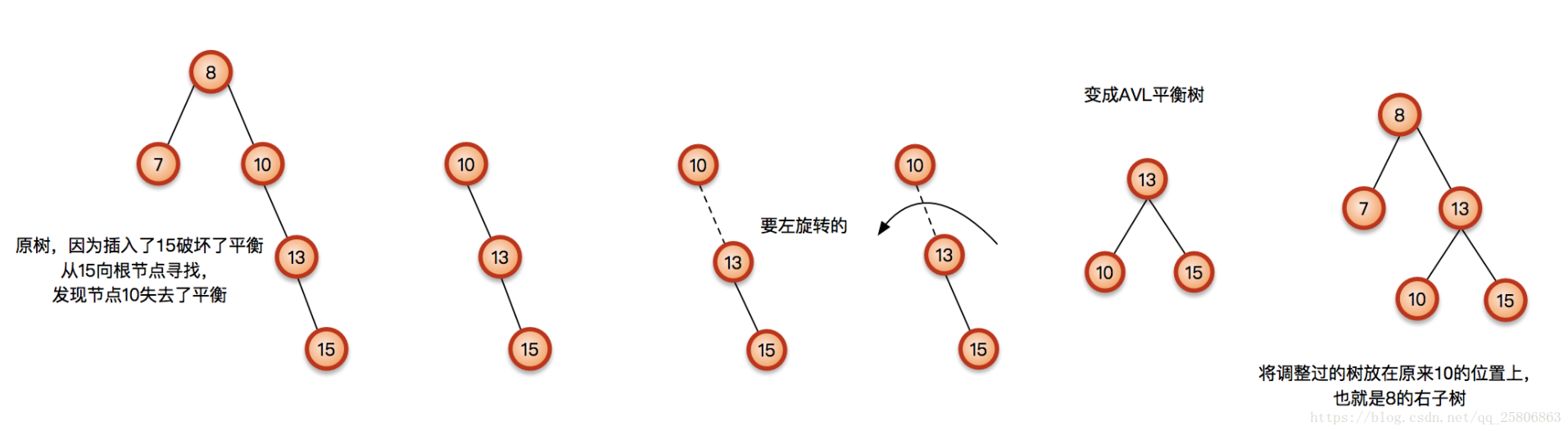
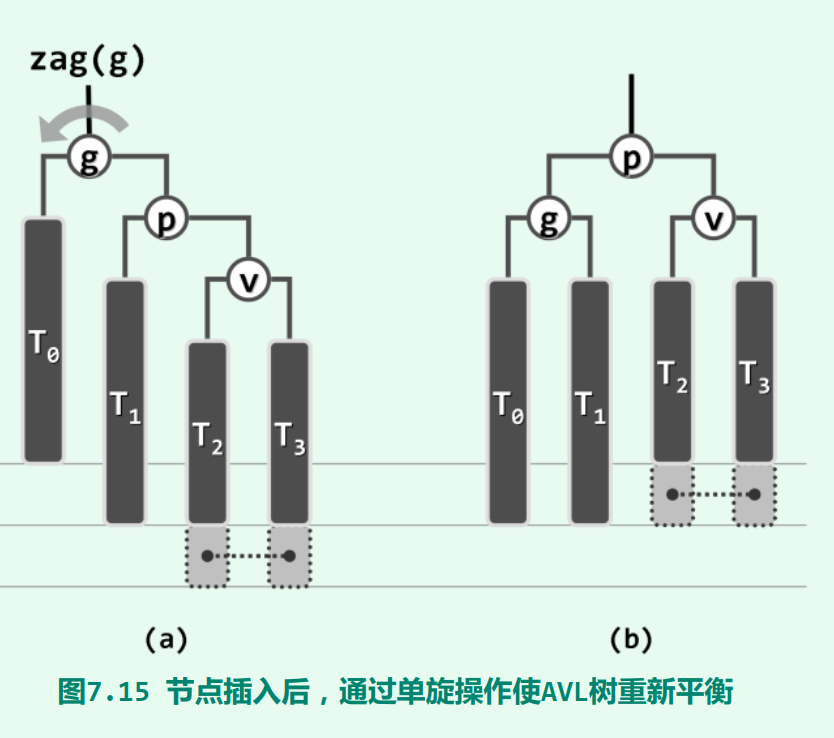
设v是p的右孩子,p是g的右孩子,只需要zag单旋就可以了(g是首次遇到的失衡祖先)
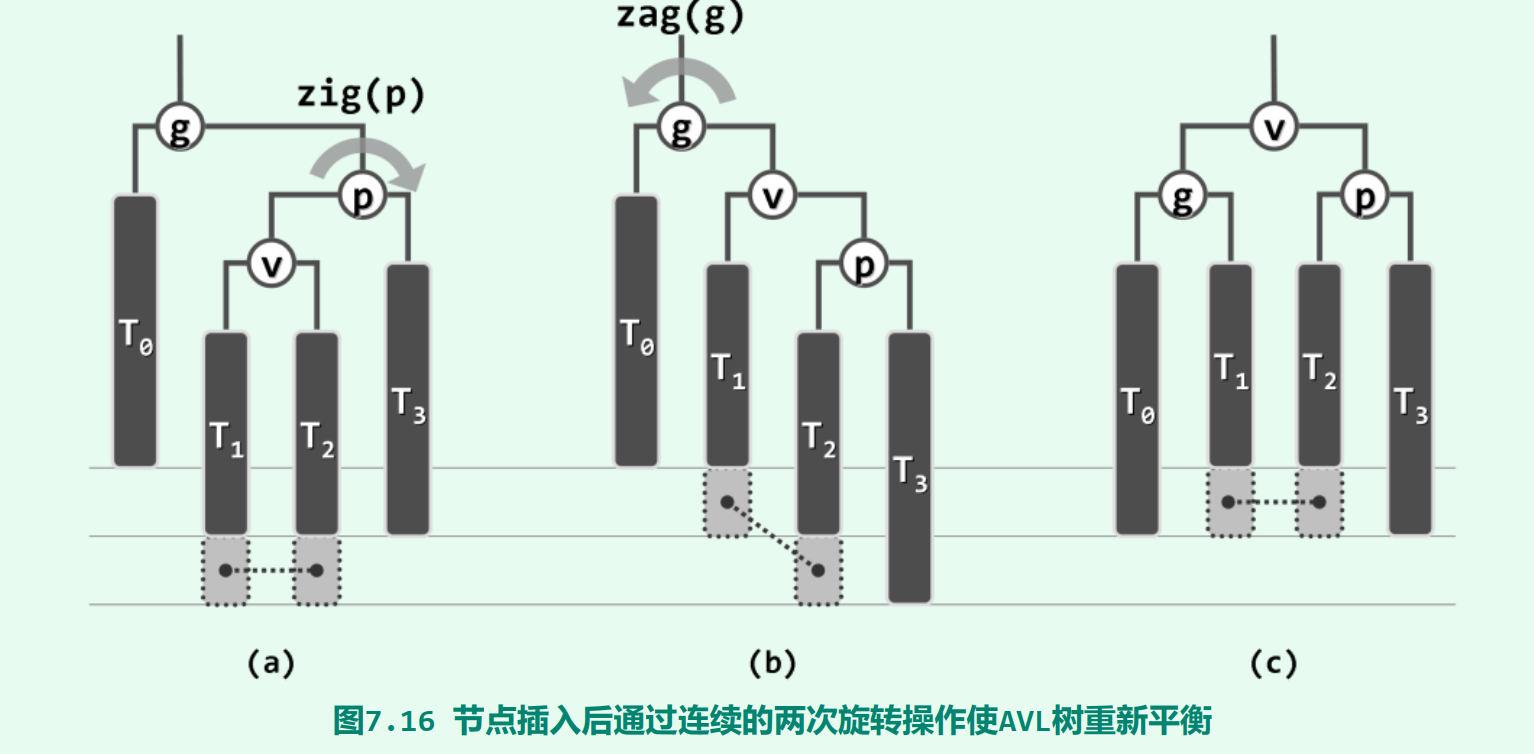
4.2.2 双旋
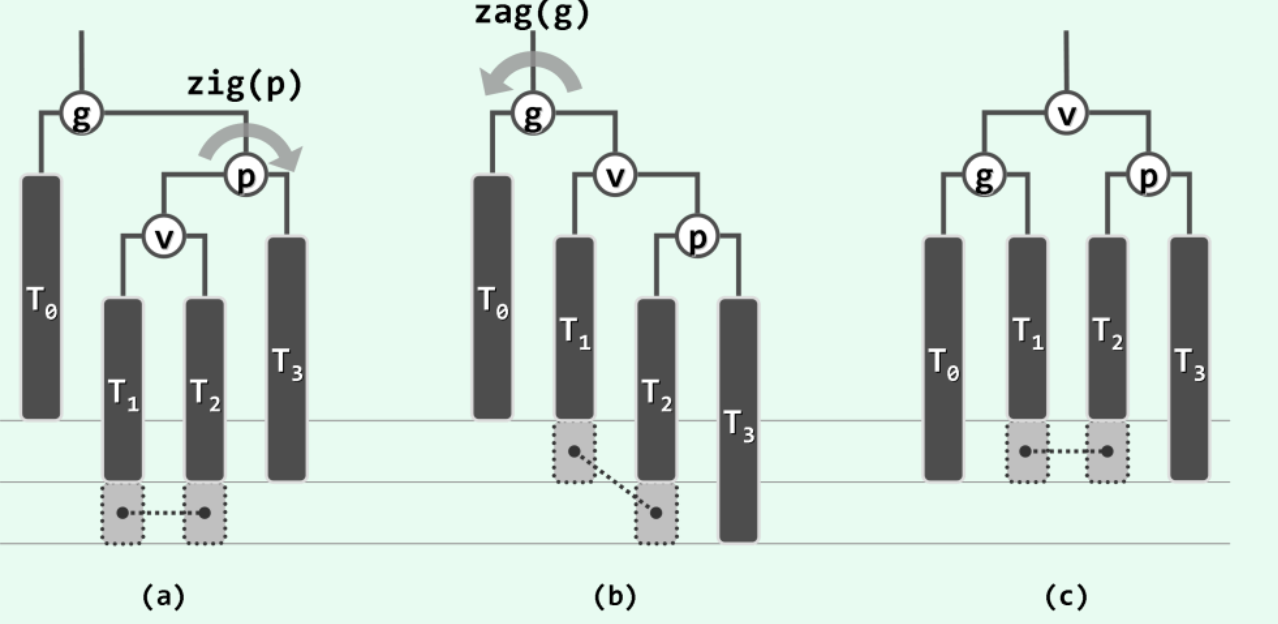
若p是g的左孩子,v是p的右孩子,就需要先右旋(p)然后左旋(g)。此类分别以父子节点为轴、方向互逆的持续两次旋转合称“双旋调整”。
4.3 节点删除
若删除后,首次遇到的失衡祖先g存在,则g的高度必与失衡前相同(参考节点删除算法)。
4.4 统一重平衡算法
无论对于插入或删除操作, 该算法也同样需要从刚发生修改的位置x出发逆行而上, 直至遇到最低的失衡节点g(x)。于是在g(x)更高一侧的子树内,其孩子节点p和孙子节点v必然存在,而且这一局部必然可以g(x)、 p和v为界,分解为四棵子树。

若有收获,就点个赞吧
0 人点赞
