1. 概述
相互之间均可能存在二元关系的一组对象,从数据结构的角度分类,属于非线性结构(non-linear structure) 。 此类一般性的二元关系,属于图论(Graph Theory)的研究范畴。从算法的角度对此类结构的处理策略,是通过遍历将其转化为半线性结构,进而借助树结构已有的处理方法和技巧, 最终解决问题。
1.1 图
G = (V,E)
集合V中的元素称作顶点(vertex); 集合E中的元素分别对应于V中的某一对顶点(u, v),表示它们之间存在某种关系,称为边。
邻接关系:存在连边的任何两个点称为邻接关系。
关联关系:参与定义领接关系的顶点于邻接关系的关系为关联关系。
1.2 无向图、有向图及混合图。
若边(u, v)所对应顶点u和v的次序无所谓,则称作无向边,例如表示同学关系的边。反之若u和v不对等,则称(u, v)为有向边, 例如描述企业与银行之间的借贷关系,或者程序之间的相互调用关系的边。
无向边(u, v)也可记作(v, u),而有向的(u, v)和(v, u)则不可混淆。这里约定,有向边(u, v)从u指向v,其中u称作该边的起点或尾顶点,而v称作该边的终点 或头顶点。
若E中各边均无方向,则G称作为无向图;若E只含有向边,则G为有向图。
相对而言,有向图的通用性更强,因为无向图和混合图都可转化为有向图。
连通分量:图中从一个顶点到达另一顶点,若存在至少一条路径,则称这两个顶点是连通着的。在无向图中,如果从顶点vi到顶点vj有路径,则称vi和vj连通。如果图中任意两个顶点之间都连通,则称该图为连通图,否则,将其中的较大连通子图称为连通分量。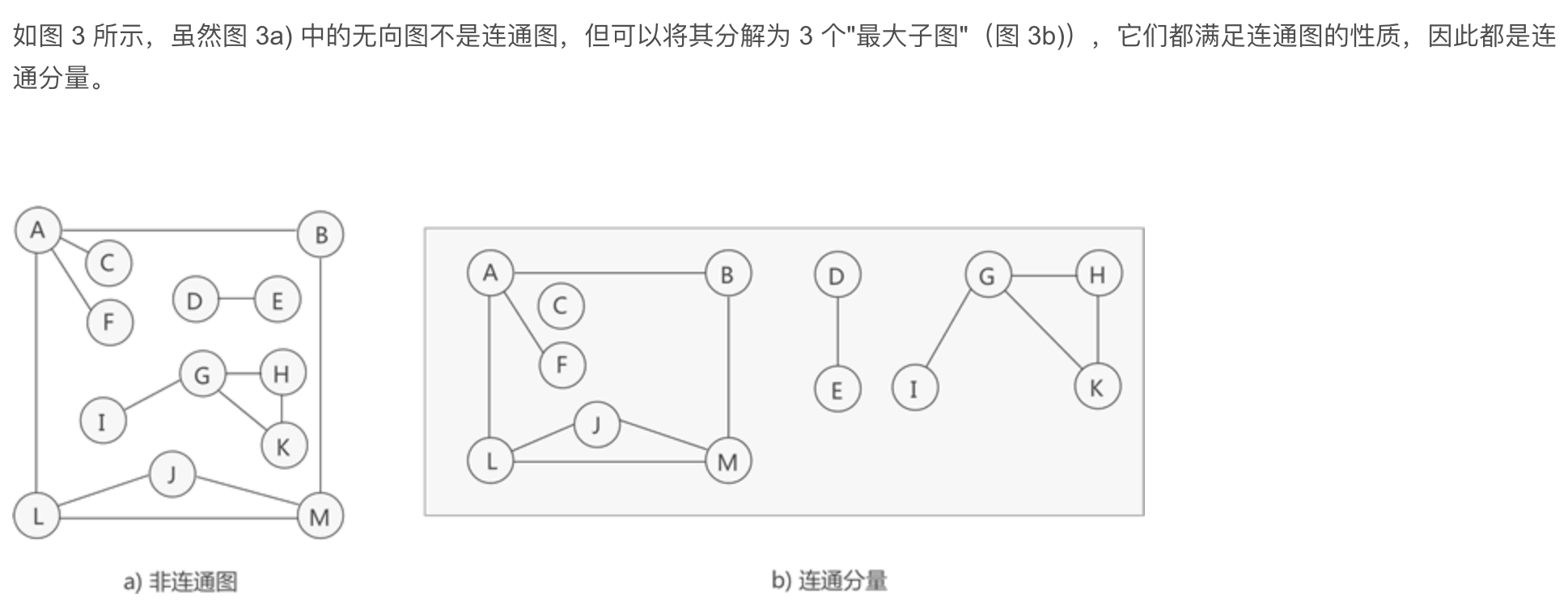
1.3 度
对于任何边e = (u, v),称顶点u和v彼此邻接,互为邻居;而它们都与边e彼此关联。在无向图中,与顶点v关联的边数,称作v的度数记作deg(v)。
对于有向边e = (u, v), e称作u的出边、 v的入边。v的出边总数称作其出度,入边总数称作其入度。
1.4 简单图
联接于同一顶点之间的边,称作自环。不含任何自环的图称作简单图。
1.5 通路与环路
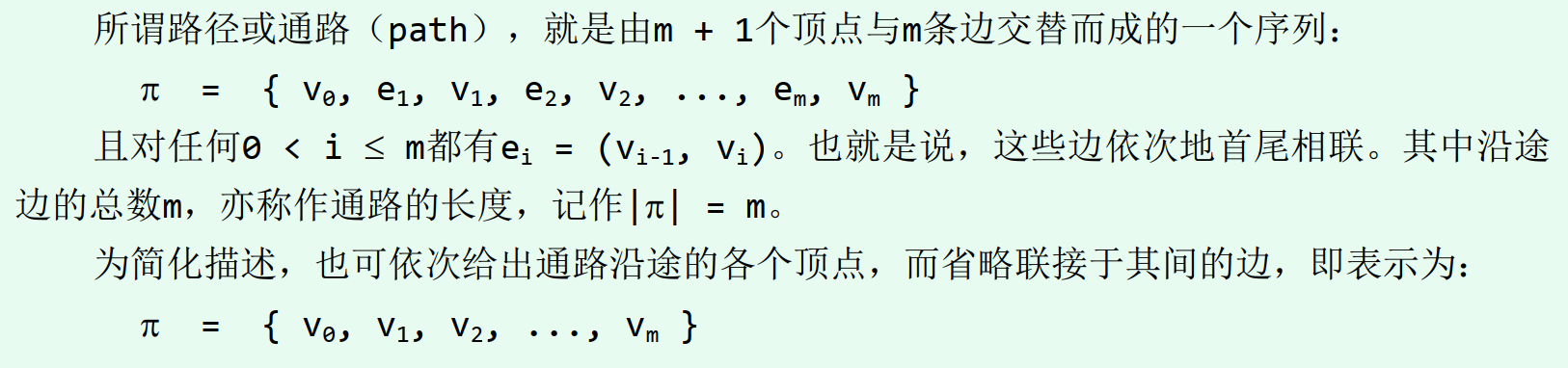
通路边必须互异,但顶点却可能重复。
沿途顶点互异的通路,称作简单通路。
对于长度大于等于1的通路,若起止顶点相同,则称作环路。若沿途除起止点外所有顶点均互异, 则称作简单环路。不含任何环路的有向图,称作有向无环图。
特别地, 经过图中各边一次且恰好一次的环路 ,称作欧拉环路。
经过图中各顶点一次且恰好一次的环路,称作哈密尔顿环路。
1.6 带权网络
需通过一个权值函数来表达每条边e的额外信息, 为每一边e指定一个权重比如wt(e)即为边e的权重。各边均带有权重的图,称作带权图或带权网络,有时也简称网络(network),记作G(V, E, wt())。
1.7 复杂度
对于无向图,每一对顶点至多贡献一条边, 故总共不超过n(n - 1)/2条边。对于有向图,每一对顶点都可能贡献(互逆的)两条边,因此至多可有n(n - 1)条边。
2. 邻接矩阵
3. 邻接表
4. 图遍历算法概述
图的遍历不仅需要访问所有顶点一次且仅一次;此外,图遍历同时还需要访问所有的边一次且仅一次。
图中顶点之间可能存在多条通路, 故为避免对顶点的重复访问, 在遍历的过程中, 通常还要动态地设置各顶点不同的状态, 并随着遍历的进程不断地转换状态,直至最后的“访问完毕” 。图的遍历更加强调对处于特定状态顶点的甄别与查找,故也称作图搜索。
各种图搜索之间的区别,体现为边分类结果的不同,以及所得遍历树( 森林) 的结构差异。其决定因素在于, 搜索过程中的每一步迭代,将依照何种策略来选取下一接受访问的顶点。实质的差异应体现在, 当有多个顶点已被访问到,应该优先从谁的邻居中选取下一顶点。
图的遍历的本质是完成非线性结构到线性结构的转换,也就是将任何一幅图转化为对应的树,或者严格的讲是支撑树。
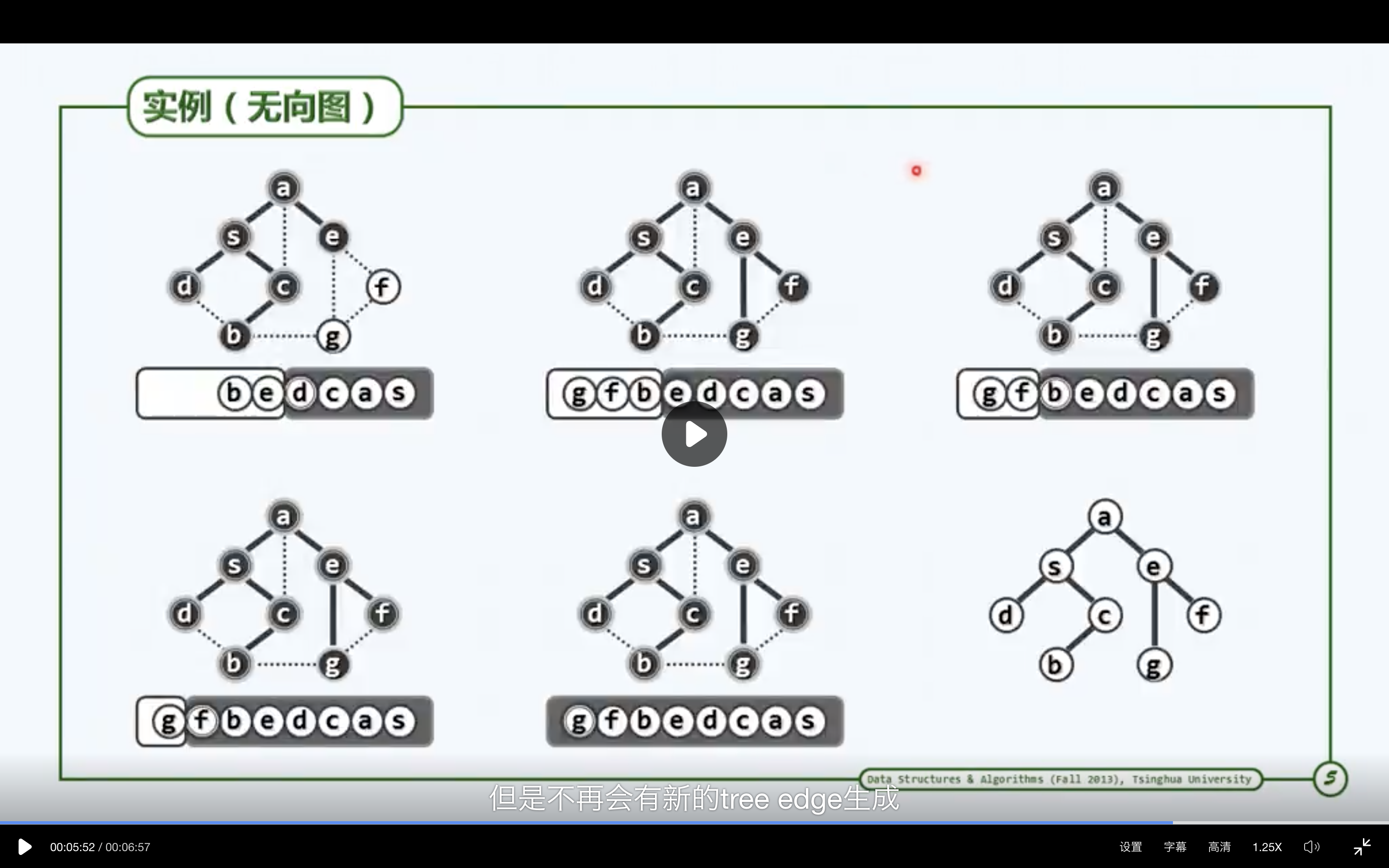
5. 广度优先搜索(breadth-first search BFC)
越早被访问到的顶点,其邻居越优先被调用。
在所有已访问到的顶点中,仍有邻居尚未访问者,构成前沿集。
反复从前沿集中找到最早被访问到的顶点v, 若其邻居均已访问到,则将其逐出前沿集;否则,随意选出一个顶点v尚未访问到的邻居,并将其加入到前沿集中。
效果等同于层次遍历,前沿集内顶点的深度始终相差不超过一。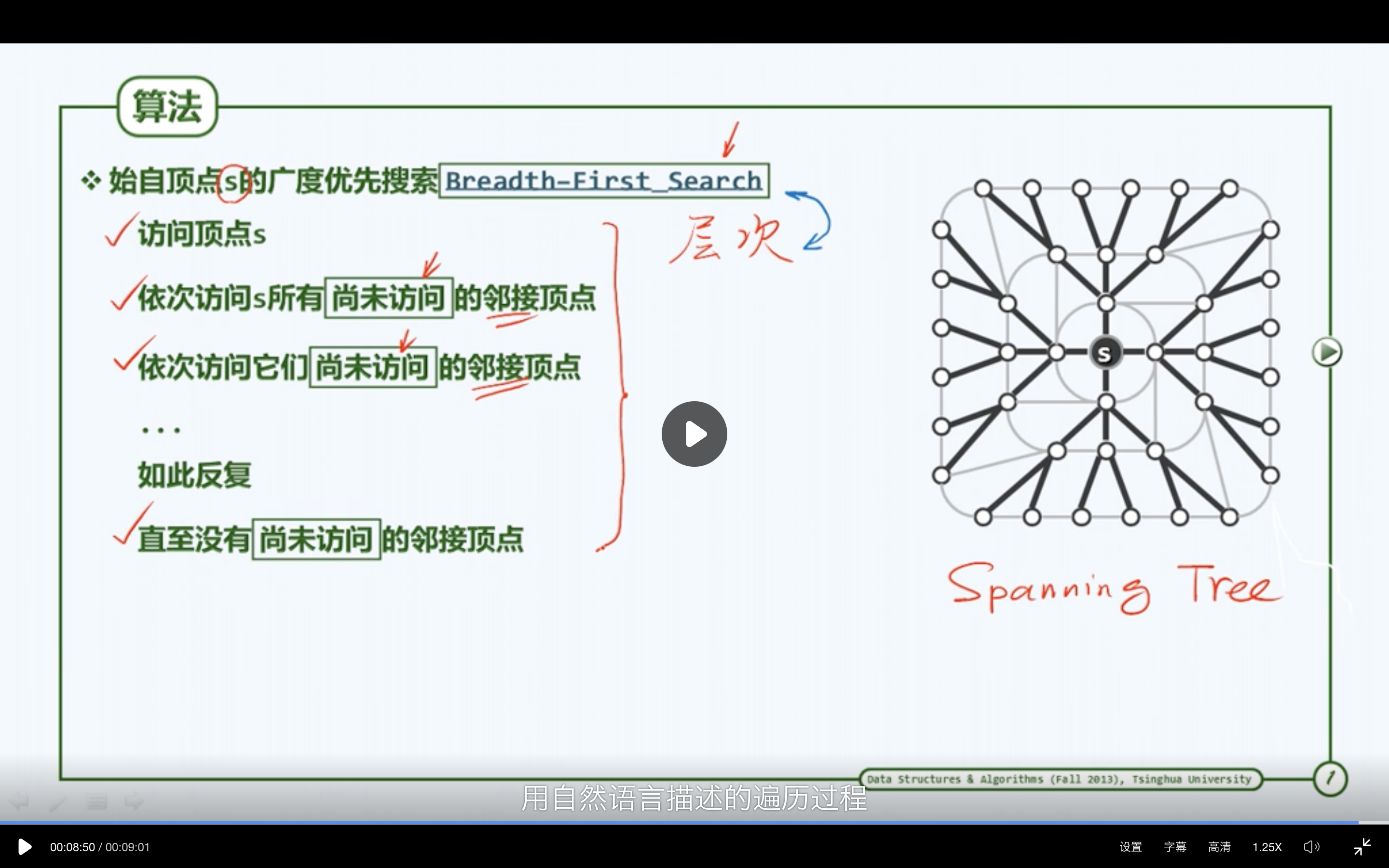
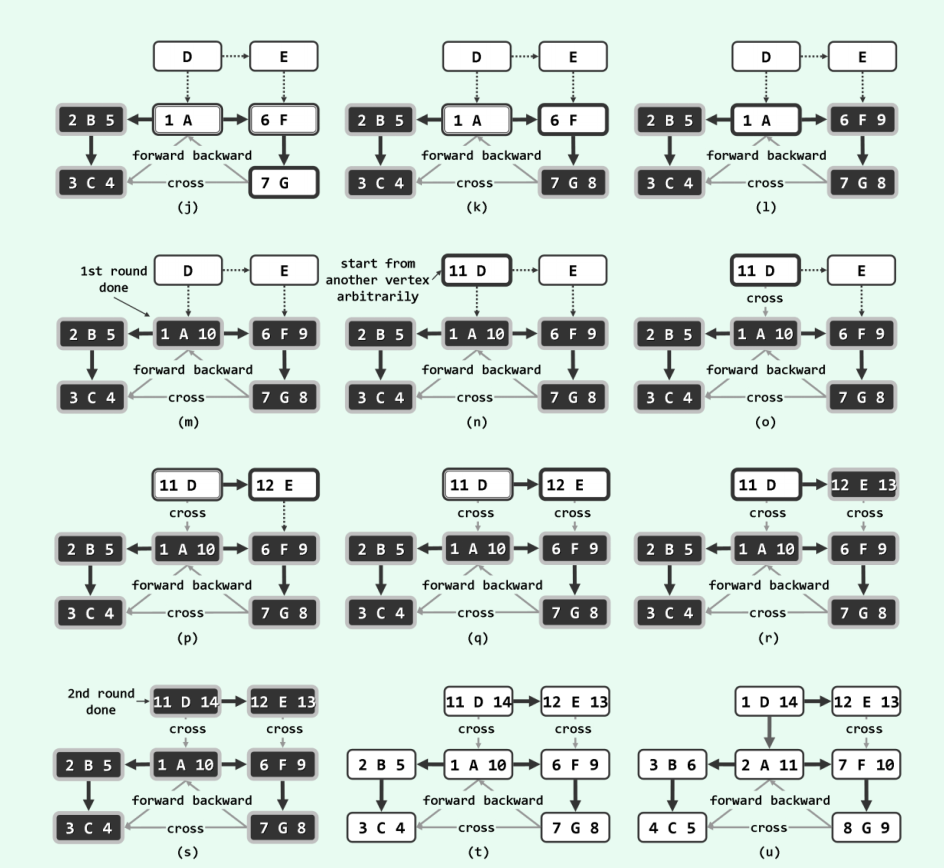
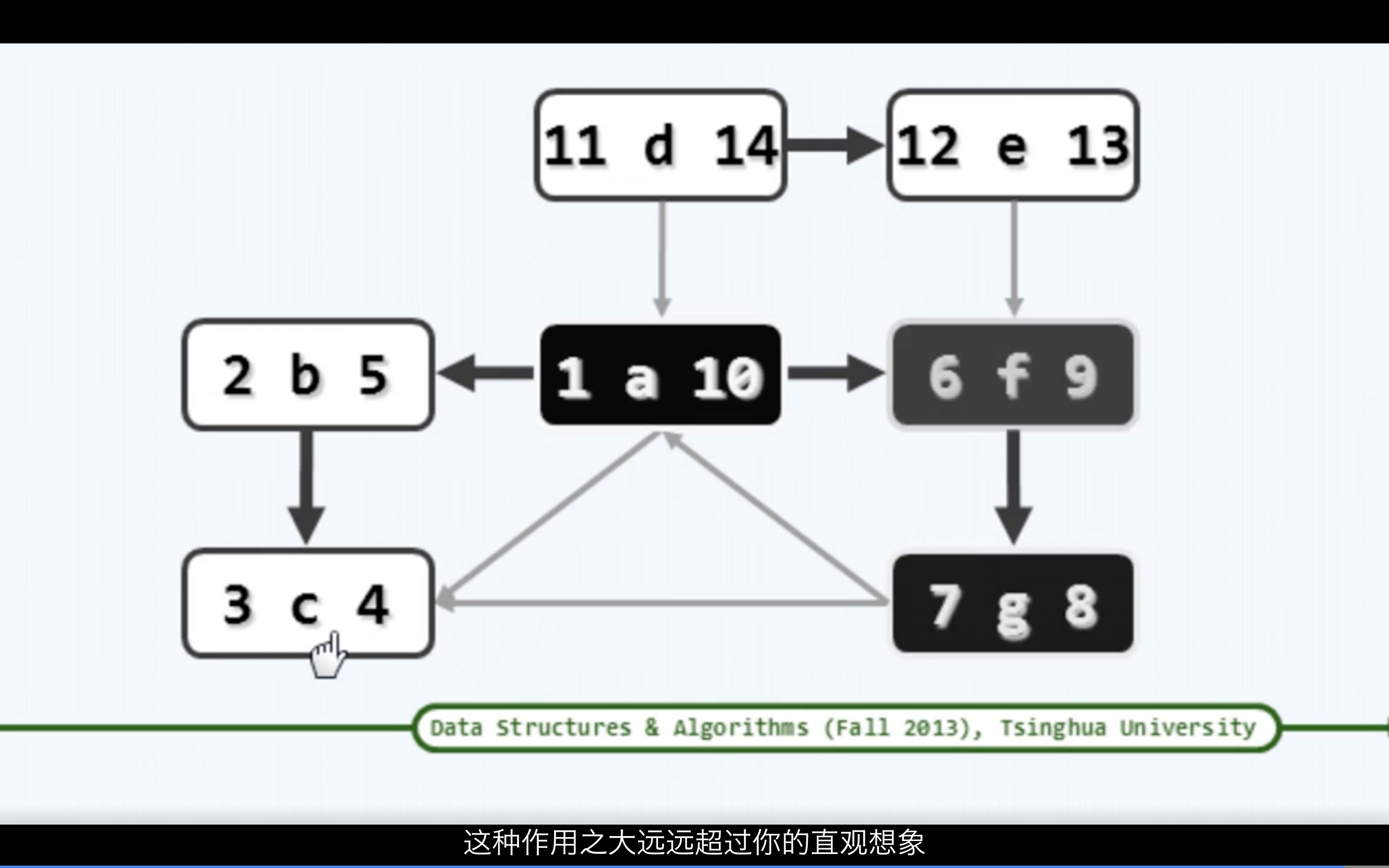
深度优先搜索(depth-first search DFS)
优先选取最后一个被访问到的顶点的邻居
以顶点s为基点的DFS搜索,将首先访问顶点s;再从s所有尚未访问到的邻居中任取其一, 并以之为基点, 递归地执行DFS搜索。各顶点被访问到的次序,类似于树的先序遍历。各顶点被访问完毕的次序,类似于树的后序遍历。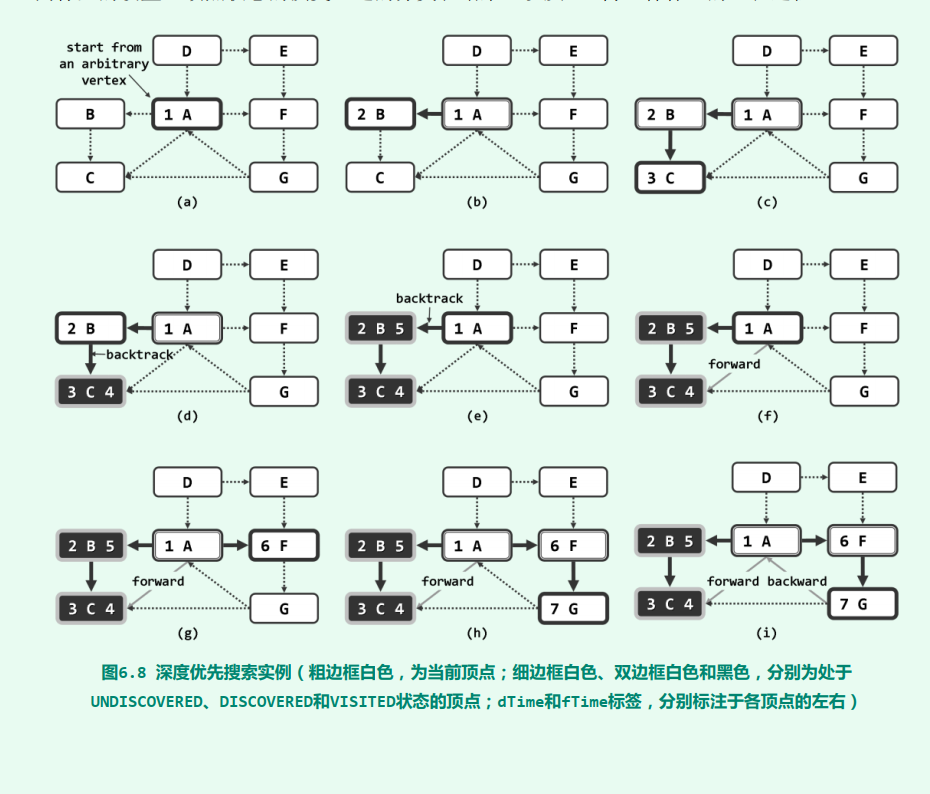

拓扑排序
给定某个实际应用的有向图,如何在与该图“相容”的前提下,将所有顶点排成一个线性序列。
“相容”的准确含义是:每一个顶点都不会通过边,指向其在此序列中的前驱顶点。这样的一个线性序列称为原有向图的一个拓扑排序。
实际上, 在任一有限偏序集中, 必有极值元素(尽管未必唯一); 相应地, 任一有向无环图,也必包含入度为零的顶点。否则,每个顶点都至少有一条入边, 这意味着图中包含环路。
有向无环图(DAG)的拓扑排序必然存在。任一有向无环图,也必然包含入度为零的顶点。于是,只要将入度为0的顶点m(及其关联边) 从图G中取出, 则剩余的G’依然是有向无环图,故其拓扑排序也必然存在。
极大元素:入度为零的顶点
极小元素: 该元素作为顶点,出度为零的顶点;在对有向无环图的DFS搜索中,首先因访问完成而转换至VISITED状态的顶点m, 也必然具有这一性质。
DFS搜索过程中各顶点被标记为VISITED的次序,恰好(按逆序)给出了原图的一个拓扑排序。
双连通域分解
关节点与双连通域
关节点:无向图G,若删除顶点v后G所包含的连通域增多,则v称作切割节点或关节点。
双连通图:不含任何关节点的图称为双连通图。任一无向图都可视作由若干个极大的双连通子图组合而成,这样每一个子图都称作原图的一个双连通域。
优先级搜索
BFS、DFS每一种选取策略都等效于, 给所有顶点赋予不同的优先级, 而且随着算法的推进不断调整;而每一步迭代所选取的顶点, 都是当时的优先级最高者。
最小支撑树
支撑树
无环连通子图
连通图G的某一无环连通子图T若覆盖G中所有的顶点,则称作G的一棵支撑树或生成树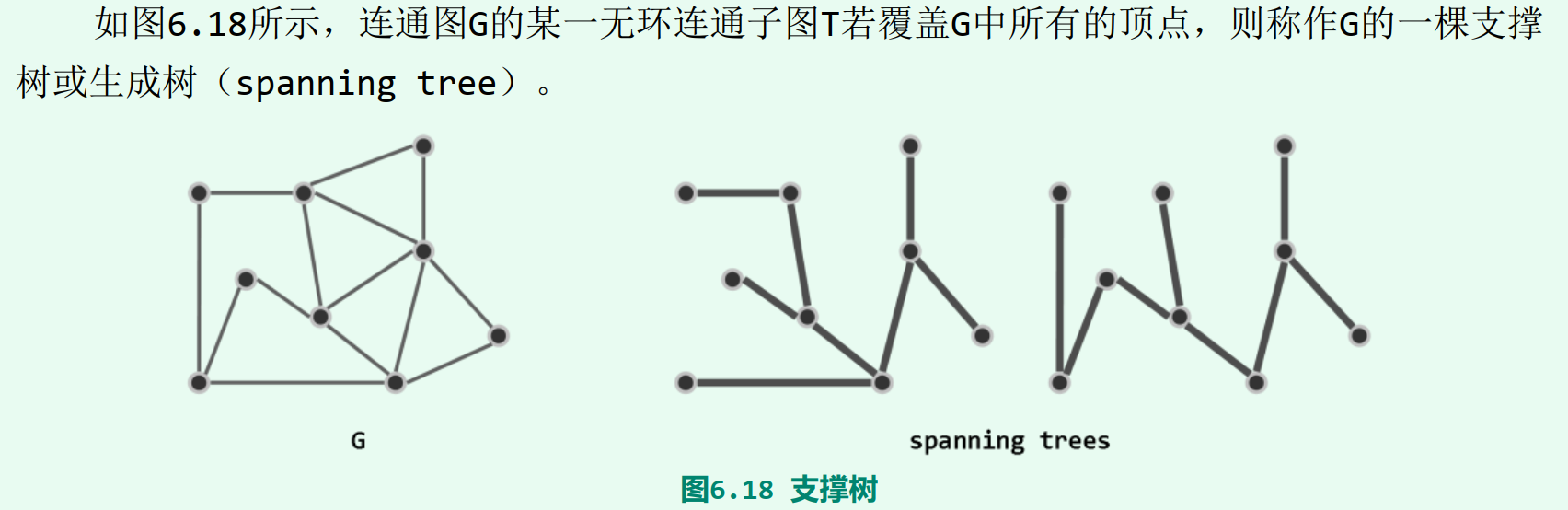
就保留原图中边的数目而言,支撑树既是“禁止环路”前提下的极大子图,也是“保持连通”前提下的最小子图。
最小支撑树
若图G为一带权网络,则每一棵支撑树的成本(cost) 即为其所采用各边权重的总和。在G的所有支撑树中,成本最低者称作最小支撑树(MST)
歧义性
尽管同一带权网络通常都有多棵支撑树,但总数毕竟有限, 故必有最低的总体成本。 然而,总体成本最低的支撑树却未必唯一。(若每条边的权重相同)。可以通过附加某种次序即可消除这种歧义性。
Prim算法
割与极短跨越边
图G = (V; E)中,顶点集V的任一非平凡子集U及其补集V\U都构成G的一个割(cut) ,记作(U : V\U)。若边uv满足u属于U且v不属于U,则称作该割的一条跨越边(crossing edge)
Prim算法的正确性基于以下事实:最小支撑树总是会采用联接每一割的最短跨越边
最短路径

最短路径树
单调性
歧义性
无环性

若有收获,就点个赞吧
0 人点赞
