减而治之
版本A
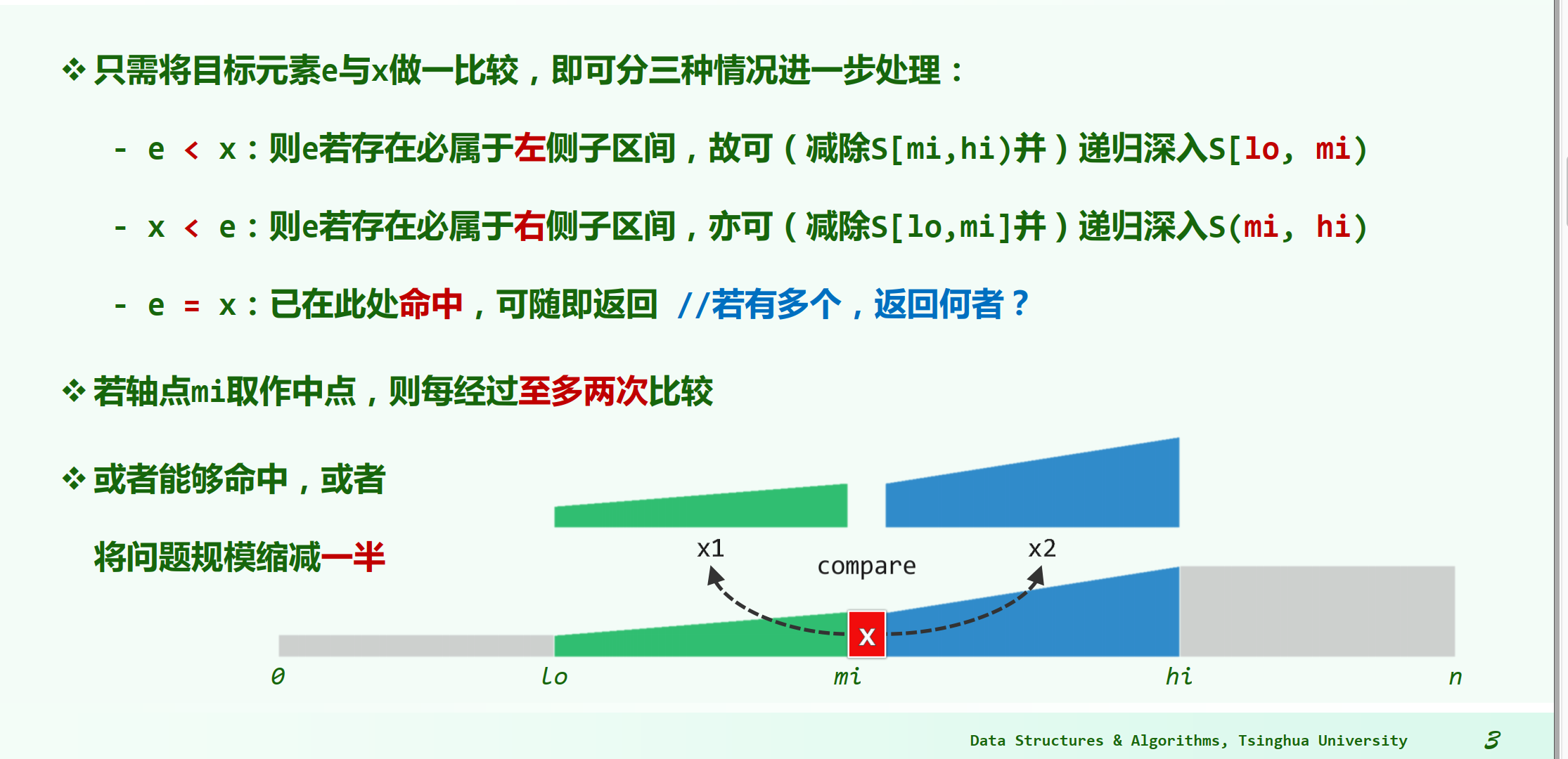
const binSearchA = (elem,e,lo,hi) => {while (lo < hi) {const mi = (lo + hi) >> 1;if (e < elem[mi]) {hi = mi; //[lo,mi)} else if (elem[mi] < e) {lo = mi + 1; //(mi,hi)} else {return mi;}}return -1;};
不足之处
- 有多个命中元素时,不能保证返回秩最大者;查找失败时,简单地返回-1,而不能指示失败的位置。
在每一步迭代中为确定左、右分支方向,分别需要做1次或2次元素比较, 从而造成不同情况所对应查找长度的不均衡。
版本B
改进思路
实际上还有另一更为直接的方法,即令以上两项的常系数同时等于1。也就是说,无论朝哪
个方向深入,都只需做1次元素的大小比较。相应地,算法在每步迭代中(或递归层次上)都只
有两个分支方向,而不再是三个。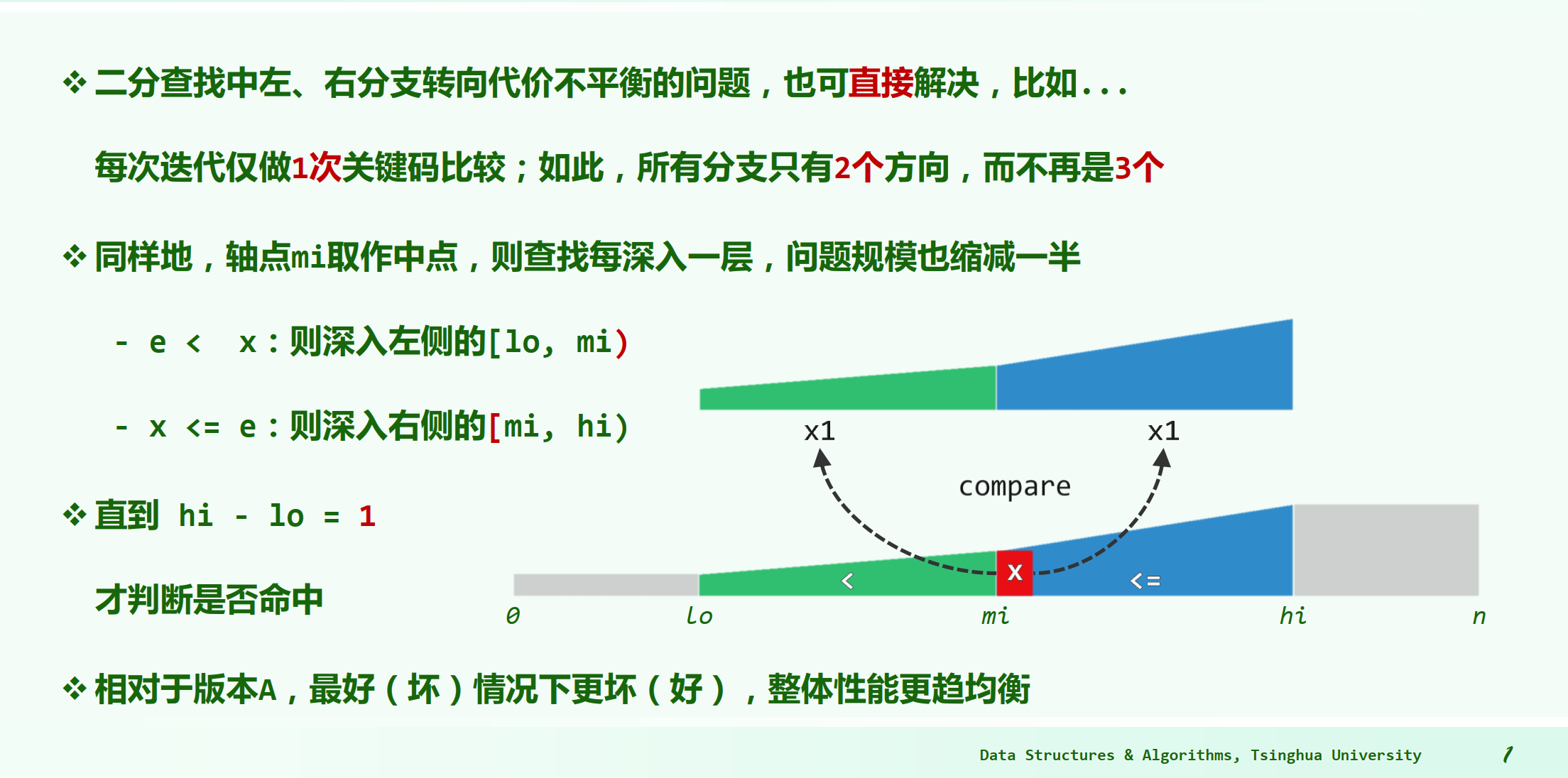
const binSearchB = (elem,e,lo,hi) => {while (lo < hi - 1) {//成功查找不能提前终止const mi = (lo + hi) >> 1;e < elem[mi] ? (hi = mi) : (lo = mi); //经比较后确定深入[lo,mi)或者[mi,hi),将lo划为包含mi的最小秩} //出口是 hi = lo+1return e === elem[lo] ? lo : -1;};
不足之处
有多个命中元素时,返回秩最大者;查找失败时,简单地返回-1,而不能指示失败的位置
版本C
//elem[0,lo)中的元素皆不大于e,elem[hi,elem.length)中的元素皆大于econst binSearchC = (elem,e,lo,hi) => {//只有当有效区间缩减为0的时候才会终止while (lo < hi) {const mi = (lo + hi) >> 1;e < elem[mi] ? (hi = mi) : (lo = mi + 1); //经比较后确定深入[lo, mi)或(mi, hi)}return lo - 1;};
循环终止时, lo = hi。考查此时的元素A[lo - 1]和A[lo]:作为A[0, lo)内的最后一个
元素, A[lo - 1]必不大于e; 作为A[lo, n) = A[hi, n)内的第一个元素, A[lo]必大于e。
也就是说, A[lo - 1]即是原向量中不大于e的最后一个元素。因此在循环结束之后,无论成功
与否,只需返回lo - 1即可这也是版本C与版本B的第三点差异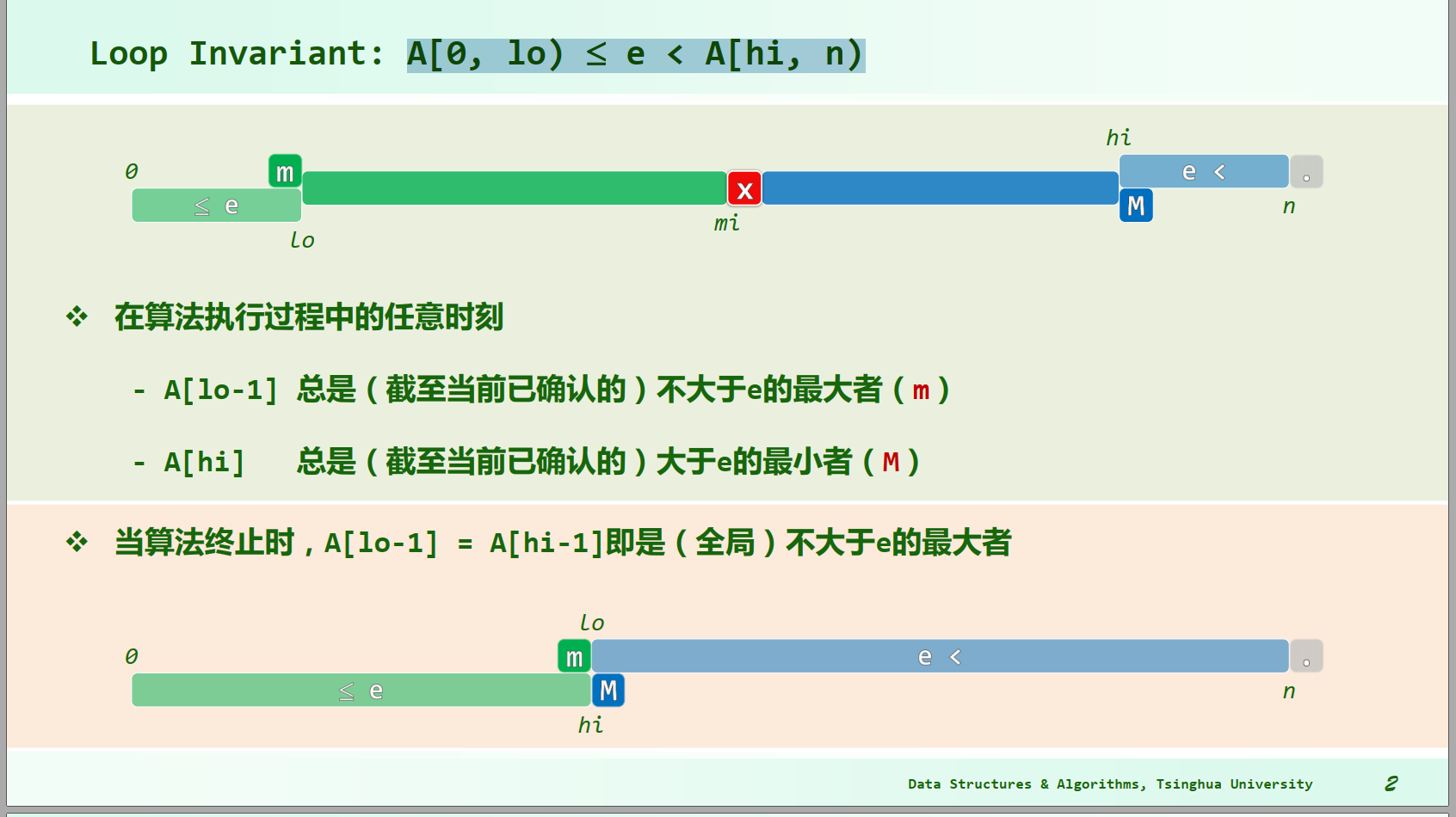

若有收获,就点个赞吧
0 人点赞
