常量
numpy内置了一些常量,常用的有:
print(np.e) # 2.718281828459045print(np.pi) # 3.141592653589793
算术运算与通用函数
以以下数组作为演示:
x=np.arange(10)
通过布尔值筛选
x<5 # array([ True, True, True, True, True, False, False, False, False, False ])
算数运算
np.sqrt(x) # 平方根np.abs(x) # 绝对值
三角函数
np.sin(x)np.cos(x)
统计函数
np.sum(x) # 求和, 输出 45np.mean(x) # 计算均值, 输出 4.5np.median(x) # 中位数, 输出 4.5np.std(x) # 标准差, 输出 2.8722813232690143np.var(x) # 方差, 输出 8.25
x=np.arange(1, 10)np.cumsum(x) # 累计求和, 输出 array([ 1, 3, 6, 10, 15, 21, 28, 36, 45], dtype=int32)np.cumproduct(x) # 累计求积, 输出 array([ 1, 2, 6, 24, 120, 720, 5040, 40320, 362880], dtype=int32)np.corrcoef(x) # 相关系数, 输出 1.0
指数与对数函数
# 指数与对数函数np.exp(x)np.log(x)np.log2(x)np.log10(x)
通过数组调用
某些函数也可直接使用数组调用:
x.min() # 同np.min(x)x.max() # 同np.max(x)x.sum() # 同np.sum(x)
指定在某个轴上的运算
多维数组, 可以通过axis指定在某个轴上的运算:
a=np.arange(16).reshape([4,4])b=a.min(axis=0) # 计算每列的最小值c=a.min(axis=1) # 计算每行的最小值print(a)print(b)print(c)
输出:
[[ 0 1 2 3][ 4 5 6 7][ 8 9 10 11][12 13 14 15]][0, 1, 2, 3][ 0, 4, 8, 12]
矩阵运算
矩阵与标量运算
a=np.arange(16).reshape([4,4])a+1a-1a*2a/2a**2
某些操作(例如 += 和 *=)会更直接更改被操作的矩阵数组而不会创建新矩阵数组。
a += 3a *= 3
多维数组拷贝后运算
举例:
a = np.array([[1,2,3],[4,5,6]])b = a[:]print(a)print(b)for i in range(a.shape[0]):a[:, i] = a[:, i] - 2print(a)print(b)
输出:
[[1 2 3][4 5 6]][[1 2 3][4 5 6]][[-1 0 3][ 2 3 6]][[-1 0 3][ 2 3 6]]
可以看出,由于a是二维数组,b拷贝a后,每一项指向的还是b的每一项的引用,所以修改a后,b也随之改变。
如果是一维数组,每个值是基本数据类型,则不会出现这种情况:
a = np.array([1,2,3])b = a[:]print(a)print(b)a = a - 2print(a)print(b)
输出:
[1 2 3][1 2 3][-1 0 1][1 2 3]
矩阵与矩阵运算
a=np.arange(1,17).reshape(4,4)b=np.arange(1,17).reshape(4,4)
a 和 b 均为:
array([[ 1, 2, 3, 4],[ 5, 6, 7, 8],[ 9, 10, 11, 12],[13, 14, 15, 16]])
按元素运算
a+ba-ba*ba/b
矩阵乘法(点乘运算)
a@b # 或 a.dot(b)
输出:
array([[ 90, 100, 110, 120],[202, 228, 254, 280],[314, 356, 398, 440],[426, 484, 542, 600]])
比如 a@b 的 [0, 0] 元素为 1*1 + 2*5 + 3*9 + 4*13
原理如下:
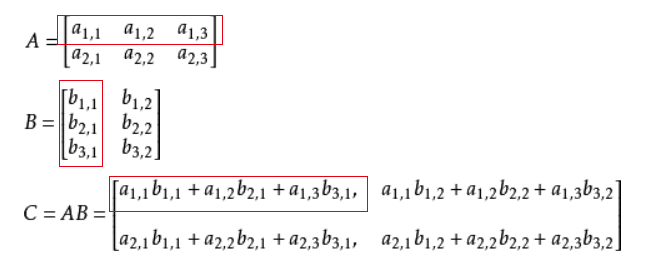

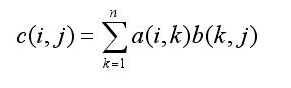
根据线性代数的基础知识可知, 矩阵乘法 X@Y 只需要满足 X的列数 与 Y的行数 相等即可:
a=np.arange(1,5).reshape(1,4)b=np.arange(5,9).reshape(4,1)a@b # 输出: array([70])
矩阵操作**
矩阵转置
a = np.array([[1,2,3],[4,5,6]])b = a.transpose()print(a)print(b)
输出:
[[1 2 3][4 5 6]][[1 4][2 5][3 6]]
方阵的对角线元素
通过diag返回方阵(行列元素数量相同)的对角线元素
a=np.arange(16).reshape([4,4])np.diag(a) # array([ 0, 5, 10, 15])
矩阵的迹
其实就是计算方阵对角线元素的和
a=np.arange(12).reshape([3,4])a.trace() # 15
linalg
numpy.linalg 模块中的函数是满足行业标准级的Fortran库。
计算矩阵行列式
a=np.arange(16).reshape([4,4])np.linalg.det(a)
计算逆矩阵
a=np.arange(16).reshape([4,4])np.linalg.inv(a) # 或 np.linalg.solve(a, np.eye(4))
解线性方程组Ax=b
a=np.arange(16).reshape([4,4])np.linalg.solve(a, np.eye(4)) # 此处求出的 x 即为 a的逆矩阵
计算方阵的本征值与本征向量
a=np.arange(16).reshape([4,4])np.linalg.eig(a)

若有收获,就点个赞吧
0 人点赞
