Part I Introduction to a problem
To navigate the environment and complete the tasks robots need sensors and actuators, which can be compared to our sensing organs and appendices. It’s not hard to draw parallels between biology and technology here - the cameras for eyes, motors for muscles, microphone for ears and so on and so forth. In reality it is of course more nuanced, at least partially because robots can employ more than one sensor for information channel, for example using cameras and laser scanner for vision. In this lesson we will learn more about modules available for use with our robotic dog, Bittle.
Part II Explaining the knowledge
There are following modules in Bittle Sensor pack:
Grove - Ultrasonic Distance Sensor
Grove - mini PIR motion sensor
CyberEye Intelligent Vision Sensor
Grove - Speech Recognizer
Grove - 0.96” OLED Display
Grove - Sound Sensor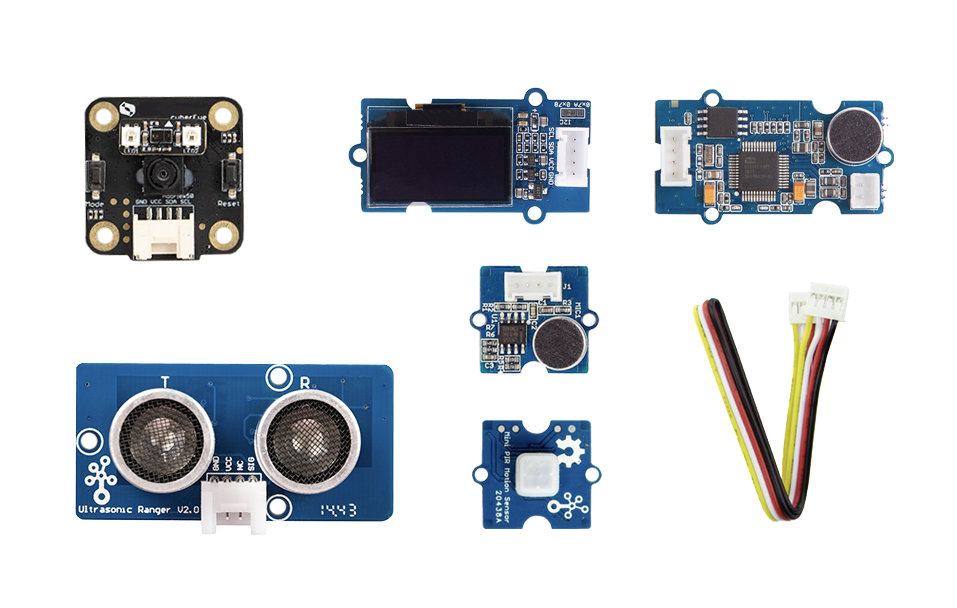
Let’s discuss each on of these modules separately.
Grove - Ultrasonic Distance Sensor
The Grove - Ultrasonic Distance Sensor utilizes ultrasonic waves to measures distance. It can measure from 3cm to 350cm with the accuracy up to 2mm. It is a digital signal sensor, which means it needs to be connected to Grove ports starting with letter D.
Grove - mini-PIR Motion Sensor
Grove - mini PIR motion sensor can detect movement of objects, people, or animals by picking up one’s infrared radiation. When an object, such as a person, passes in front of the background, such as a wall, the temperature at that point in the sensor’s field of view will rise from room temperature to body temperature, and then back again. The sensor converts the resulting change in the incoming infrared radiation into a change in the output voltage, and this triggers the detection. It is a digital signal sensor, which means it needs to be connected to Grove ports starting with letter D.
CyberEye Intelligent Vision Sensor
CyberEye Intelligent Vision Sensor is a camera sensor coupled with an ESP32 microchip, that can perform multiple computer vision functions, including color recognition, ball recognition, human sensing, card pattern (shapes, traffic signs, and numbers) recognition. All the visual recognition algorithms on the CyberEye Vision Sensor are processed locally, with no need for the network.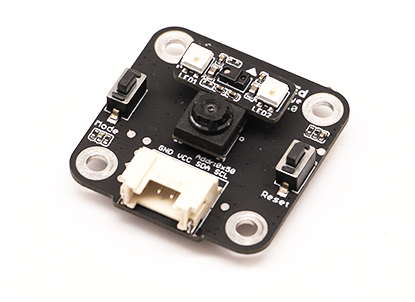
Grove - Speech Recognizer
Grove - Speech Recognizer can recognize 22 pieces of commands including ‘start’, ‘stop’, ‘Play music’ and so on. The wake-up word for starting speech recognition is Hicell. When it recognizes the wake-up word, LED turn red, then you can say the command word, if it recognize the command word, LED will turn blue. It is a digital signal sensor, which means it needs to be connected to Grove ports starting with letter D.
Grove - 0.96” OLED Display
The Grove - 0.96” OLED Display is a monochrome(white) 128×64 pixels passive display matrix module with Grove I2C Interface. It can be used to display debugging information or just draw funny faces.
Grove - Sound Sensor
Grove - Sound Sensor can detect the sound intensity of the environment. The main component of the module is a simple microphone, which receive sound and convert it to electrical signal, which can be processed by Bittle mainboard. It is an analog signal sensor, which means it needs to be connected to Grove ports starting with letter A.

Part III Solving a problem
Task 1
Divide the modules into three groups by type of signal: digital, analog and I2C modules.
Key Digital: Grove - Speech Recognizer, Grove - mini PIR motion sensor, Grove - Ultrasonic Distance Sensor Analog: Grove - Sound Sensor I2C: Grove - 0.96” OLED Display, CyberEye Intelligent Vision Sensor
Task 2
Divide modules into two groups by direction of signal: input (to the board) or output (from the board)
Key Input: Grove - Speech Recognizer, Grove - mini PIR motion sensor, Grove - Ultrasonic Distance Sensor, Grove - Sound Sensor, CyberEye Intelligent Vision Sensor Output: Grove - 0.96” OLED Display
Task 3
Study the Grove connector and Grove cable - pay attention to the fact that there are 4 color of the Grove cable.

pin 1 - Yellow (for example, SCL on I2C Grove Connectors)
pin 2 - White (for example, SDA on I2C Grove Connectors)
pin 3 - Red - VCC on all Grove Connectors
pin 4 - Black - GND on all Grove Connectors
In most of the modules only pin 1(signal), pin 3 and pin 4 are used, which means that when connecting Grove module to Bittle, you need to choose the top port number. For example, when connecting PIR Motion sensor to Bittle D6/D7 Grove port, in Codecraft you will need to choose port D6, because it corresponds to pin 1.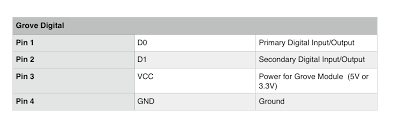
Part IV Expanding the knowledge
Explore the Seeed studio wiki for information about above modules and others.

若有收获,就点个赞吧
0 人点赞
