Introduction to a problem
They say the best motivation is laziness. The person who invented a computer did it because as he said himself he was lazy. How so? It takes quite a lot of effort to invent something, but after you completed the invention, it reduces the work you need to do later.
There are many tasks humans are not good at, or just not willing to do. Here are some examples:
- dangerous work, e.g. chopping the trees, performing operations in hazardous environment
- monotonous repeating work, such as car assembly, packaging
This is why humans invented complex machines, called robots to help them to do the tasks they don’t want to do. In this course we will go on exciting journey of discovery to learn about robots and will make our own robotic dog!
Explaining the knowledge
What is a robot?
A robot is a machine—especially one programmable by a computer— capable of carrying out a complex series of actions automatically. Robots can be guided by an external control device or the control may be embedded within. Robots may be constructed to take on human form but most robots are machines designed to perform a task with no regard to how they look.

While it is possible to make robots in any shape, according to their application, it is sometimes worth taking look at how nature solved the problem in question. The transfer of technology between lifeforms and manufactured objects is desirable because evolutionary pressure typically forces living organisms, including fauna and flora, to become highly optimized and efficient. A classical example is the development of dirt- and water-repellent paint (coating) from the observation that practically nothing sticks to the surface of the lotus flower plant (the lotus effect).
Scientists have found that the basis for both of these properties of lotus leaves (self-cleaning and water-repellent) lies in the rough structure of the surface of the lotus leaves. The lotus leaf has a series of protrusions on the order of 10 μm (1.0 x 10 m) high covering its surface. Each protrusion is itself covered in bumps of a hydrophobic, waxy material that are roughly 100 nm (1 x 10 m) in height. When water droplets are applied to the lotus leaf, they sit lightly on the tips of the hydrophobic protrusions as if on a bed of nails.
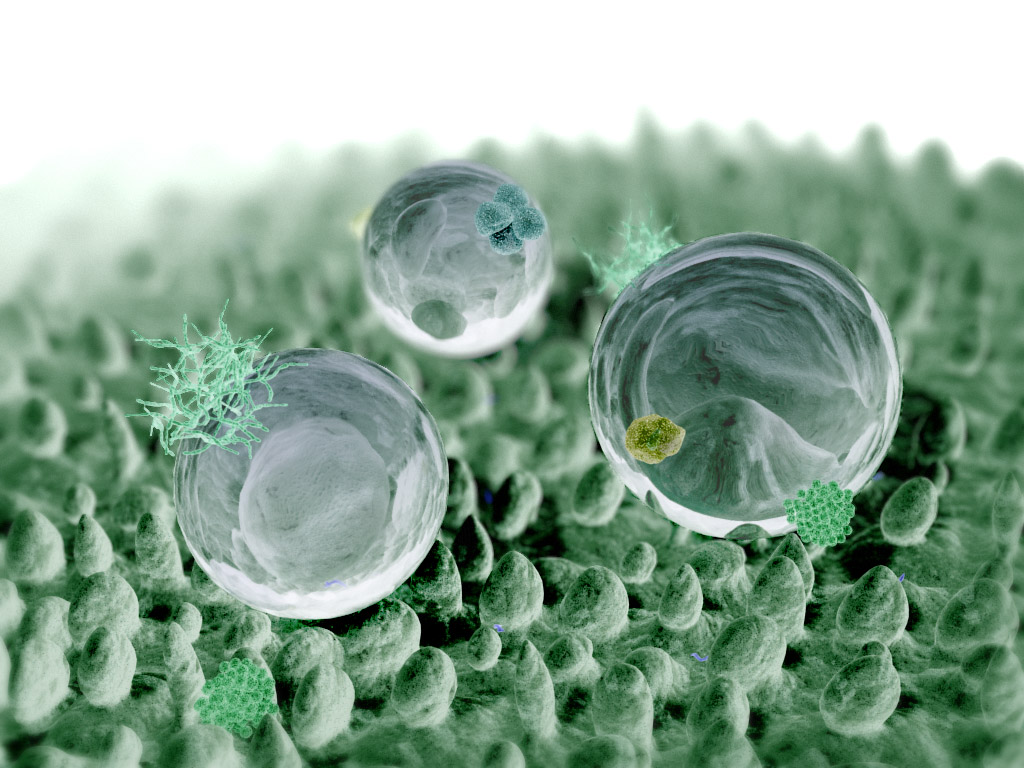
This combined structure traps a layer of air in between the surface of the leaf and the water droplet. Hence, the water is not allowed to wet the surface and is easily displaced  .
.
Bionics
The science of creating mechanisms which designs and structure is learned from nature is called bionics. The official definition for Bionics (also known as biomimetics) is the science about studying nature to create modern technology. The word bionic was coined by Jack E. Steele in August 1958, being formed as a portmanteau from biology and electronics.
Examples of bionics in engineering include the hulls of boats imitating the thick skin of dolphins; sonar, radar, and medical ultrasound imaging imitating animal echolocation. Below is the picture of 12-week old human fetus obtained by using Ultrasound imaging technology.
In robotics, bionics and biomimetics are used to apply the way animals move to the design of robots. For instance, BionicKangaroo was based on the movements and physiology of kangaroos.


Other exciting bionic robots include bionic robo-shark made by RoboSea, BionicANT by Festo and of course humanoid Atlas by Boston Dynamics.
Robo-Shark is inspired by the natural movements of the underwater predators, it can travel at high speeds of up to 10 knots with minimal noise. It uses a three-joint caudal fin instead of a propeller to create motion for stealthy maneuvers, which also minimizes the use of power. It also has a built-in omnidirectional obstacle-avoidance system to increase the fluidity of its operation. The Robo-Shark’s battery lasts for two hours and it can travel down to 300 meters to explore and study sea life. 
BionicANTs are intended to demonstrate cooperative behavior based on a natural model. Like real ants, the BionicANTs follow sets of simple rules and can operate autonomously, while at the same time working together to complete large scale, complex tasks. 
The ants communicate between themselves to coordinate their actions and movements, and small groups of them can manipulate objects much larger than themselves by pushing and pulling together [see below].
Atlas is the world’s most dynamic humanoid robot, Atlas is a research platform designed to push the limits of whole-body mobility. Atlas’s advanced control system and state-of-the-art hardware give the robot the power and balance to demonstrate human-level agility.
The robot we will use in this course, Bittle also has it’s shape and movement coordination algorithms modeled after an animal - a domestic dog. Legged motion gives it more freedom to navigate unstructured terrains, and expresses the joy of life whenever it moves. Also, Bittle is designed to be soft. Besides the elasticity of the material, the spring-loaded upper legs flatten the shock on joint servos to protect their gears, imitating the nature’s design of joints in legged animals.

Solving a problem
 Watch a video about robots. After watching a video answer the questions.
Watch a video about robots. After watching a video answer the questions.
1) What are the types of robots by application? (manufacturing, logistics, self-driving cars, appliance robots, healthcare robots)
2) What are the types of robots by locomotion(way of movement)? (Locomotion: walking, rolling, hopping, swimming, slithering, flying)
3) What type the robot we are going to make belong to? (Walking, four-legged, bio-inspired)
4) Can you think of application for our robot? What if you make the same robot, but a domestic dog sized?
Expanding the knowledge
Maybe you have never thought about it, but walking is hard. It took nature many years of evolution to come up with four-legs design. Let’s have a look at the robot walking fail compilation for fun.
Why is walking difficult? Analyze the walking.

若有收获,就点个赞吧
0 人点赞
