Sites:
- https://www.bigocheatsheet.com/,一个备忘清单,列了各个算法的复杂度
10大排序算法
参考:
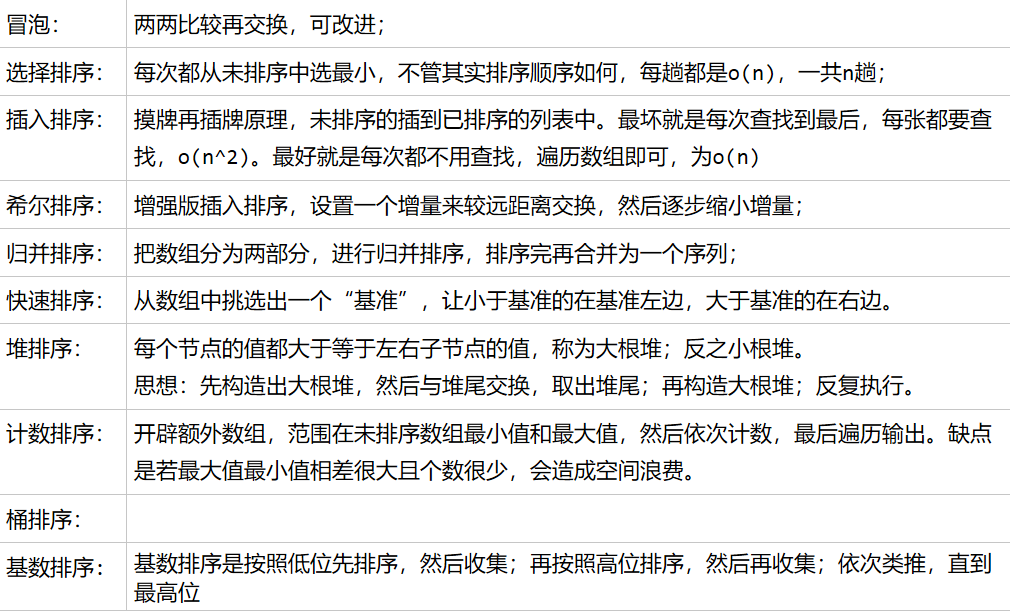
基本描述
排序算法比较
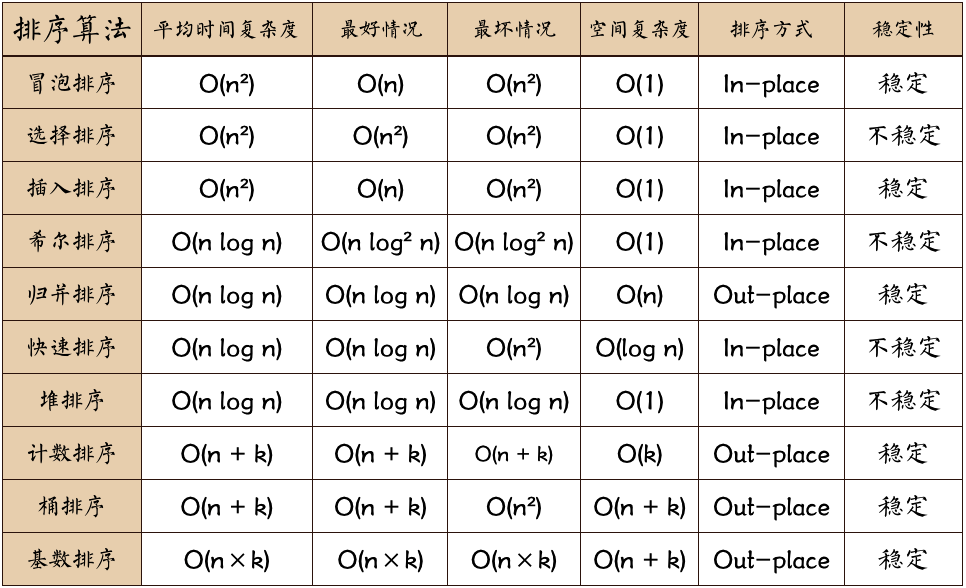
稳定性:如果原先a在b前面,排序后a仍然在b前面,它们的相对性不变,则具有稳定性。
冒泡
function bubbleSort(arr) {length = arr.lengthfor (let i = 0; i < length; i++) {for (let j = i + 1; j < length; j++) {if (arr[i] > arr[j]) {let temp = arr[i]arr[i] = arr[j]arr[j] = temp}}}}
冒泡改进(错误的)
冒泡改进:设置一个flag来表示若未发生交换则表示排序结束
function bubbleSort(arr) {length = arr.lengthfor (let i = 0; i < length; i++) {let flag = truefor (let j = i + 1; j < length; j++) {if (arr[i] > arr[j]) {flag = falselet temp = arr[i]arr[i] = arr[j]arr[j] = temp}}if (flag) {break}}return arr}
快速排序
function quickSort(arr) {// 手写快速排序function mySort(arr, begin, end) {let pivot;if (begin < end) {pivot = helper(arr, begin, end) // 这里arr传入之后,就会对arr进行处理改变mySort(arr, begin, pivot - 1)mySort(arr, pivot + 1, end)}}function helper(arr, begin, end) { // 将arr以baseValue为中心进行分类let baseValue = arr[begin];while (begin < end) {// 从后面开始查找,直到找到一个小于基准的值就停止,并交换while (begin < end && arr[end] >= baseValue) {end -= 1}[arr[begin], arr[end]] = [arr[end], arr[begin]]// 从前面开始查找,直到找到一个大于基准的值就停止,并交换while (begin < end && arr[begin] <= baseValue) {begin += 1}[arr[begin], arr[end]] = [arr[end], arr[begin]]}return begin}mySort(arr, 0, arr.length - 1)return arr}
归并排序
//归并排序function mergeSort(arr) {if (arr.length <= 1) return arr // 数组长度小于1则直接返回const midIndex = arr.length / 2 | 0 // 中间索引const leftArr = arr.slice(0, midIndex) // 左边的数组const rightArr = arr.slice(midIndex, arr.length) // 右边的数组return merge(mergeSort(leftArr), mergeSort(rightArr))}function merge(leftArr, rightArr) { // 合并两个有序数组const result = []while (leftArr.length && rightArr.length) {leftArr[0] <= rightArr[0] ? result.push(leftArr.shift()) : result.push(rightArr.shift())}while (leftArr.length) result.push(leftArr.shift())while (rightArr.length) result.push(rightArr.shift())return result}//我的写法function mergeSortedTwoArr(leftArr = [], rightArr = []) {let i = 0,j = 0,result = [];while (i < leftArr.length) {while (j < rightArr.length) {if (leftArr[i] < rightArr[j]) {result.push(leftArr[i++]);break;} else {result.push(rightArr[j++]);break;}}if (j === rightArr.length) break;}if (i === leftArr.length) result = result.concat(rightArr.slice(j));if (j === rightArr.length) result = result.concat(leftArr.slice(i));return result;}
选择排序
插入排序
希尔排序
堆排序
计数排序
桶排序
基数排序
7大查找算法
查找算法分类:
1)按静态查找、动态查找分类:查找表中是否有删除和插入操作。
2)按有序查找、无序查找分类:查找表是否有序。
平均查找长度(ASL):
顺序查找
二分查找
使用条件:已排序的列表;若无序列表则先进行排序再使用。适用于静态查找表,如果有插入删除的操作来维护有序的排序则不太适用。
时间复杂度:平均和最坏情况都是o(logn);
空间复杂度:o(1);
记忆细节:看初始right是否是数组最后一个数,若是则while那里为”<=”,后面的mid修改也要有”+1”、”-1”的操作。
function BinarySearch(arr, target) {// 明确三个数left, right, midlet left = 0;let right = arr.length - 1; // 注意点1let mid;while (left <= right) { // 注意点2mid = parseInt(left + (right - left) / 2);if (target === arr[mid]) return mid;else if (target < arr[mid]) right = mid - 1; // 点3else if (arr[mid] < target) left = mid + 1; // 点4}return -1;}
插值查找(二分优化)
在二分查找中,由于mid = (low+high) / 2,因此每次比较的都是中间值。
我们来思考这样一个场景:使用字典查找单词时,比如查找“zero”这个单词,我们习惯上直接翻到字典后面的页数去慢慢找,而不是字典页数对半查找。因此就有了插值查找的概念。插值查找就是二分查找的优化。
插值查找的mid = low + (target - arr[low])/(arr[high] - arr[low])*(high - low),这样处理以后的mid相比于二分查找的mid会更靠近查找目标的下标。
时间复杂度:平均时间复杂度相对于二分查找有改进,为o(log(logn)),最坏的为o(logn)。
// 相比于二分查找,只需要修改midmid = parseInt(left + ((target - arr[left]) / (arr[right] - arr[left])) * (right - left));
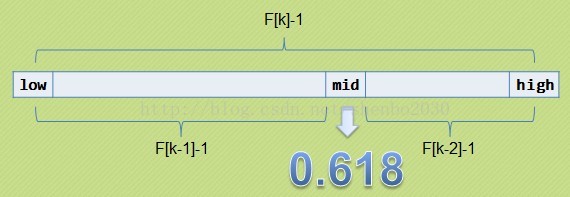
斐波那契查找(二分优化)
树表查找
二叉树查找算法:二叉搜索树(BST)
定义:递归地对于每个根节点来说,若其左子树存在则左子树的所有节点值小于根节点;若其右子树存在则右子树的所有节点值大于根节点。
平均时间复杂度:平均时间复杂度o(logn);最坏时间复杂度:o(n),发生在二叉树极度不平衡的情况下,比如树中绝大多数都是单子树,是的需要进行n次查找。为了改进这样的问题,设计出了平衡二叉树。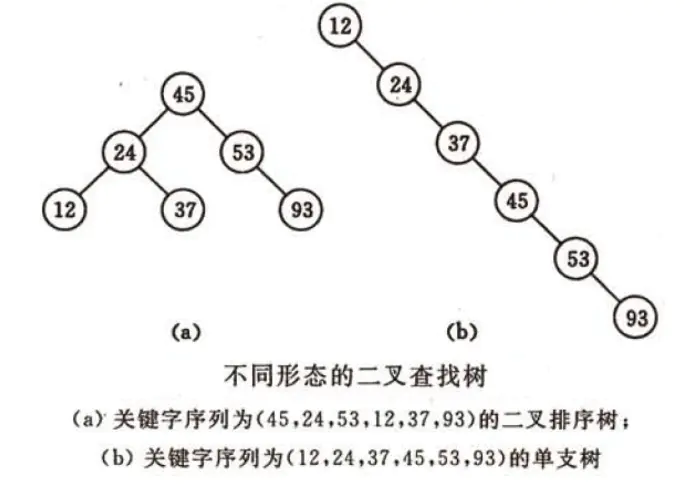
平衡查找树:平衡二叉树
定义:递归地对于每个根节点来说,若根节点存在,则其左右子树的高度相差不大于1。
有难度的是将不平衡的二叉查找树转化为平衡二叉查找树。
时间复杂度:插入、查找都为o(logn)。
平衡查找树:2-3查找树
定义:2-3指的是根节点的孩子可以是2个也可以是3个,所以不是二叉树。
分块查找
是顺序查找的一种改进方法。块与块之间必须有序,但块内可以无序。先通过顺序查找或二分查找找到属于哪个块,然后再块内查找。
哈希查找
哈希表也叫做散列表,原理是可以根据给定的键(key)直接访问内存存储位置的数据,那根据给定的键直接访问到数据的这个过程,或者说这种映射关系是由散列函数来完成的。所以我们在拿到一组数据的时候,数组中每个项通过散列函数进行映射,映射关系需要额外的存储空间,所以哈希表是很典型的以空间换时间的算法。下次当我们要查找某个数时,只要通过散列函数就能拿到映射在内存中的数据。
实现散列函数有几种方法:
- 直接定址法:f(x) = a*x + b类似这样的;
- 随机数法;
- 余数法:f(x) = x mod p;
- ……
但都有相同的愿望,都是想通过某种转换关系,让关键字(key)尽可能分散到指定大小的顺序结构之中。越分散,说明之后查找时间复杂度越小,空间复杂度越高。但分散的时候可能将多个项映射到同一个“槽”之中,这种情况就称作“哈希冲突”,所以我们需要一种办法来解决这种情况,解决的过程叫做“冲突解决”。常见的有2种解决冲突的办法:拉链法、线性探测法。
查找平均时间复杂度:o(1)。

若有收获,就点个赞吧
0 人点赞
