在貪心隨機算法中,每次都隨機獲取一個長期記憶,無法通過微調來漸進優化
爬山法則在當前的記憶向量上進行優化,隨機初始化在一個「山腰」位置,每次朝著一個更高/更低的位置前進一步,最後到達一個局部最高點/最低點
最終的結果也許不是全局最優的(除非是一個非常簡單的模型,否則很難找到一個全局的最優解)
如果發現訓練陷入了某個區域,可以考慮再次隨機選取一個「山腰」
具體實現中有多重策略
模擬退火法
「退火」是冶金學的一個過程,將金屬加熱,然後緩慢冷卻。
模擬退火算法,從某個「高溫點」開始,此時長期記憶在一個很大的區間隨機取值。
隨著訓練過程的進行,溫度開始下降,長期記憶的變化範圍也跟著變小
模擬退火依然是「貪心」的,保存的還是已知的最優解
基於當前位置,考慮下一步的行動
隨機選擇一個「下一步」,如果效果更好,則移動到新位置
如果效果更差,則會根據概率決定是否移動(概率與「溫度」有關),溫度越高,移動的概率就越大

冷卻進度
用來描述迭代期間「溫度」下降的速度,初期較高,逐漸減小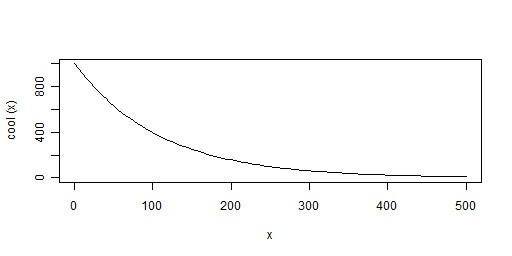
給定初始溫度和目標溫度(不能為 0),可以用下述公式計算:
退火概率
接受三個輸入:
- 當前誤差
- 前一步的誤差
- 當前溫度

溫度越高,P 越大
返回值在 (0, 1) 之間,返回 1 表示選擇更壞的結果的概率為 100%
將 P 和隨機生成的一個數字進行比較,若隨機數更大,則接受這個更壞的結果
Nelder-Mead 演算法
也叫 「下山單純性法」,「變形蟲法」
首先構造一個「單純形」(在碰撞檢測中有提到過),假設求解的問題是 N 維的,則該單純形就有 N+1 個頂點
單純形本質上是一組可能解的集合,算法總是保存著 N+1 個可能的解,隨著訓練進行,形狀會不斷改變。到訓練後期,這個單純形會變得很小,此時選擇表現最好的頂點作為解即可。
Nelder-Mead 演算法最初會假定一個解向量(可以隨機生成一個解),如果之前有進行過一次 Nelder-Mead 演算法,可以取其解作為初值,進一步優化。
初始的解向量會作為起始的單純形的一個頂點,因此還需要 N 個頂點,將初始向量的 N 個維度分別改變一定的量,即可得到餘下的 N 個頂點。
通常情況,初始單純形的各邊都是等長的。
以二維空間中的一個三頂點單純形為例: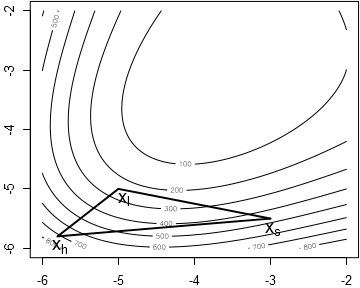
可以將頂點視為登山隊員,每個隊員都在尋找地圖上的最優點,演算法則是根據更好的兩個隊員,來把最差的隊員移動到更好的位置上。
演算法一次迭代包含以下步驟:
- 找出最差,次差和最佳的頂點
- 把最差的點向更好的一側「反射」
- 反射成功,則擴張
- 反射失敗,則收縮
比較古老的實現中會有一個「萎縮」的步驟,不過後來發現多此一舉
反射 Reflection
如圖所示,最差的點是 Xh,c 為 Xs 和 XI 的中點。Xh 要沿著虛線方向前進,這裡選取了一個很遠的目標點 Xr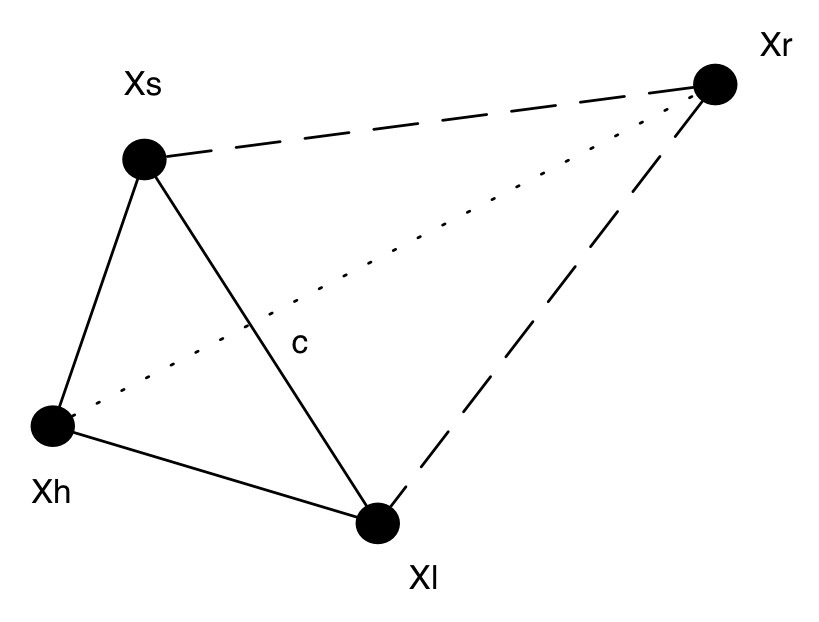
之後要對 Xr 進行評估,判斷其表現是否有進步
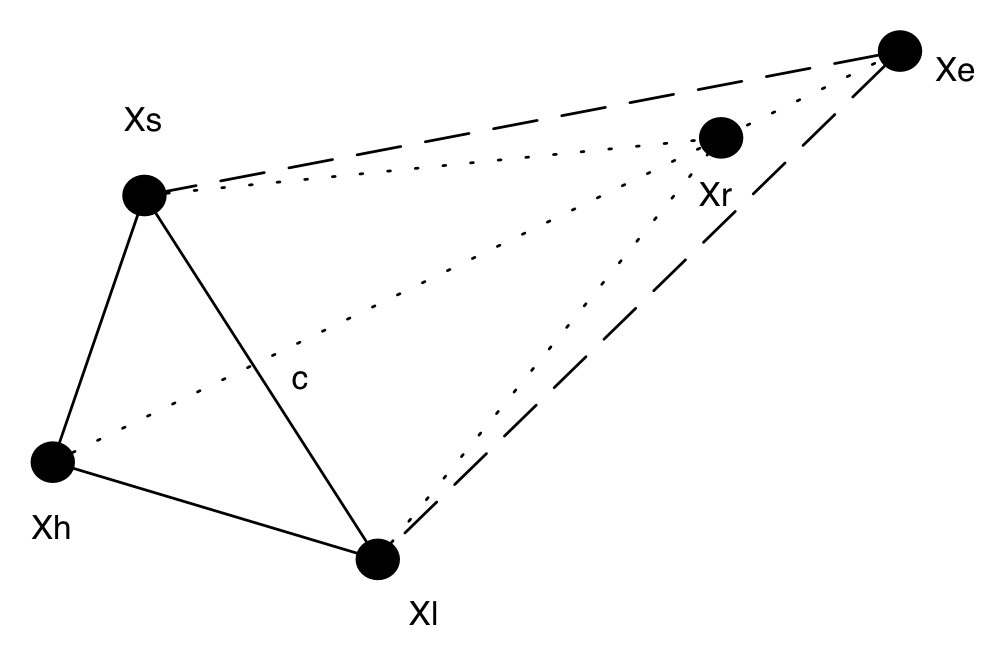
擴張 Expansion
隊員 Xh 發現移動到 Xr 效果更好,然後他貪了,想跑的更遠一些,於是他選擇走到 Xe 處。本次迭代結束。
收縮 Contraction
發現跑到 Xr 效果並不如 Xh,所以更好的選擇雖然是向 Xs 和 XI 繼續靠攏,但移動不超過 C 點。本次迭代結束。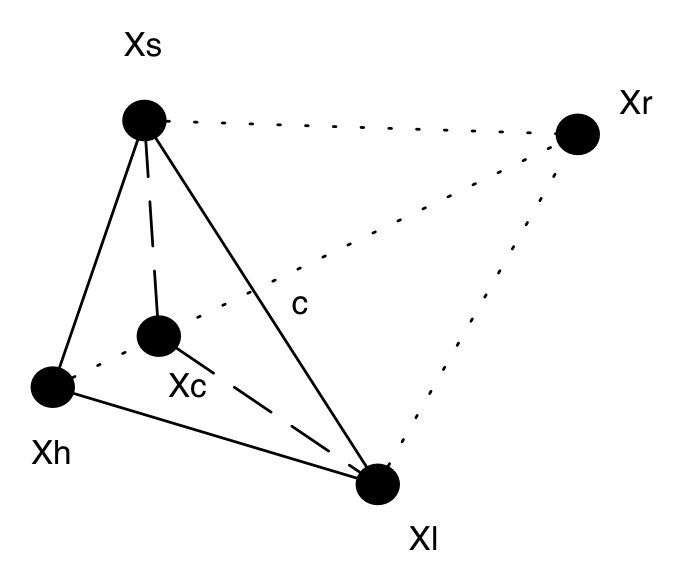
終止條件
對於這類迭代演算法,何時終止很重要,一般有 3 個獨立的判斷標準:
- 迭代次數超過最大值
- 結果足夠好
- 各頂點距離足夠近
倘若頂點擠作一團,可以選擇將最佳頂點作為頂點之一,重新構造一個單純形,再運行一遍算法
Nelder-Mead 演算法每次迭代只需要重新評估一個頂點,因此效率較高。

若有收获,就点个赞吧
0 人点赞
