当PID namespace中的init进程结束时,会销毁对应的PID namespace,并向所有其它的子进程发送SIGKILL。这也是为什么当我们手动kill掉容器的第一个init进程,容器会自动结束。
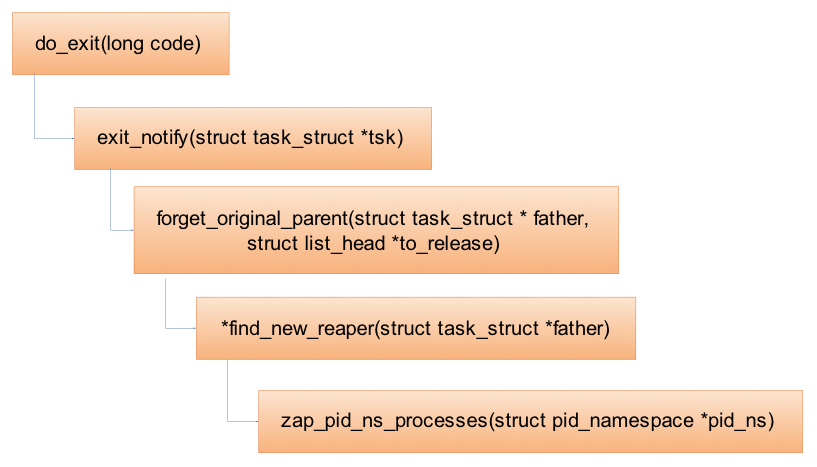
static struct task_struct *find_child_reaper(struct task_struct *father,struct list_head *dead)__releases(&tasklist_lock)__acquires(&tasklist_lock){struct pid_namespace *pid_ns = task_active_pid_ns(father);struct task_struct *reaper = pid_ns->child_reaper; // pid_ns->child_reaper记录的pid namespace的1号进程struct task_struct *p, *n;if (likely(reaper != father))return reaper;//这个father要是命名空间的1号进程,它要退出了好像问题有点严重了...还会有托孤吗?这个命名空间是继续存在还是走向毁灭呢?//内核秉承稳定第一的理念,处理起事情来总是小心翼翼。首先它想到的就是退出的father是否还有活着的兄弟姐妹,有的话赶紧扶正上位,可别让整个命名空间群龙无首呀。reaper = find_alive_thread(father);if (reaper) {pid_ns->child_reaper = reaper;return reaper;}// 1号进程退出了,也没有alive_thread了write_unlock_irq(&tasklist_lock);list_for_each_entry_safe(p, n, dead, ptrace_entry) {list_del_init(&p->ptrace_entry);release_task(p);}zap_pid_ns_processes(pid_ns);write_lock_irq(&tasklist_lock);return father;}
/** When we die, we re-parent all our children, and try to:* 1. give them to another thread in our thread group, if such a member exists* 2. give it to the first ancestor process which prctl'd itself as a* child_subreaper for its children (like a service manager)* 3. give it to the init process (PID 1) in our pid namespace*/static struct task_struct *find_new_reaper(struct task_struct *father,struct task_struct *child_reaper){struct task_struct *thread, *reaper;thread = find_alive_thread(father);if (thread)return thread;if (father->signal->has_child_subreaper) {unsigned int ns_level = task_pid(father)->level;/** Find the first ->is_child_subreaper ancestor in our pid_ns.* We can't check reaper != child_reaper to ensure we do not* cross the namespaces, the exiting parent could be injected* by setns() + fork().* We check pid->level, this is slightly more efficient than* task_active_pid_ns(reaper) != task_active_pid_ns(father).*/for (reaper = father->real_parent;task_pid(reaper)->level == ns_level;reaper = reaper->real_parent) {if (reaper == &init_task)break;if (!reaper->signal->is_child_subreaper)continue;thread = find_alive_thread(reaper);if (thread)return thread;}}return child_reaper;}

若有收获,就点个赞吧
0 人点赞
