腾讯会议讲解兵
学习word‘工程电控部分’
工程专用继电器
A板
STM32f427II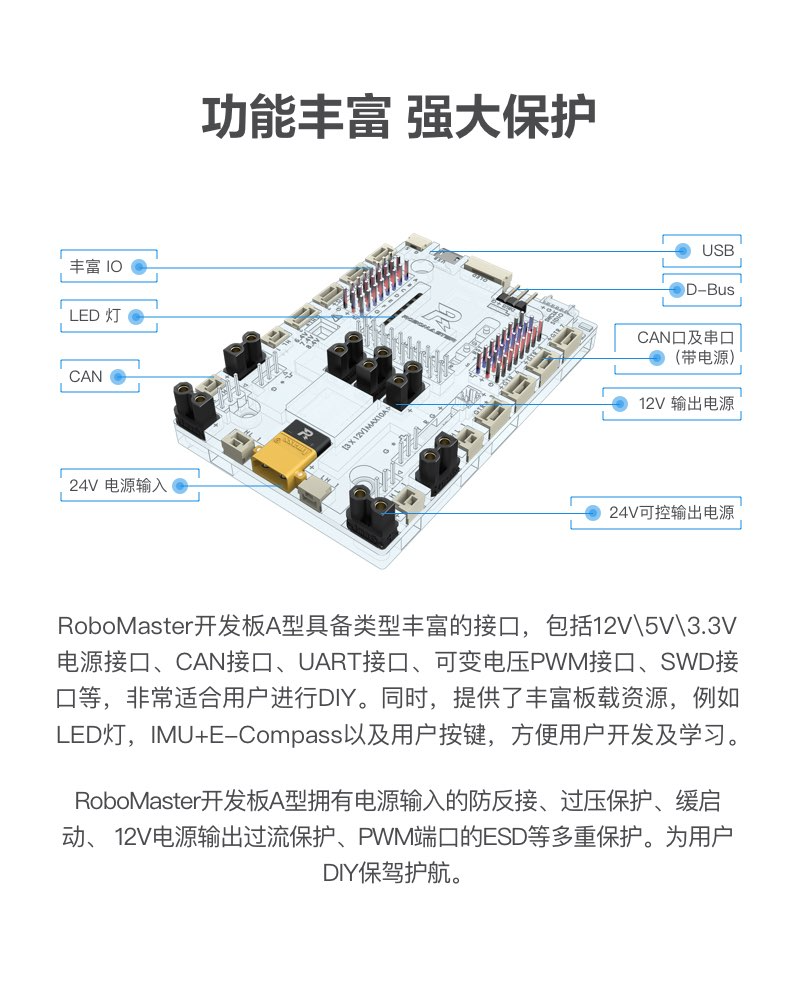
RoboMaster开发板A型具备类型丰富的接口,包括12V\5V\3.3V电源接口、CAN接口、UART接口、可变电压PWM接口、SWD接口等,非常适合用户进行DIY。同时,提供了丰富板载资源,例如LED灯,IMU+E-Compass以及用户按键,方便用户开发及学习。
RoboMaster开发板A型拥有电源输入的防反接、过压保护、缓启动、12V电源输出过流保护、PWM端口的ESD等多重保护。为用户DIY保驾护航。
RoboMaster开发板A型可使用4S-6S锂电池。可以连接舵机、遥控器接收机、裁判系统(主控模块)、单轴陀螺仪模块、电子调速器、妙算、PLC(可编程逻辑控制器)、蓝牙模块、PC、开发板B型、开发板OLED以及外接Arduino配件等多种设备。
B板
STM32f103RCT6
RoboMaster 开发板B型专为传感器和执行部件设计,可配合RoboMaster 开发板A型使用,完成复杂机器人的开发。该开发板主控为STM32F105R8T6,接口丰富、结构紧凑,支持电磁阀等控制。拥有四路光耦隔离保护接口,可搭配RoboMaster开发板OLED模块使用。具备以下特点:1、体积小巧;2、双CAN,接口丰富;3、光耦隔离工业传感器接口。
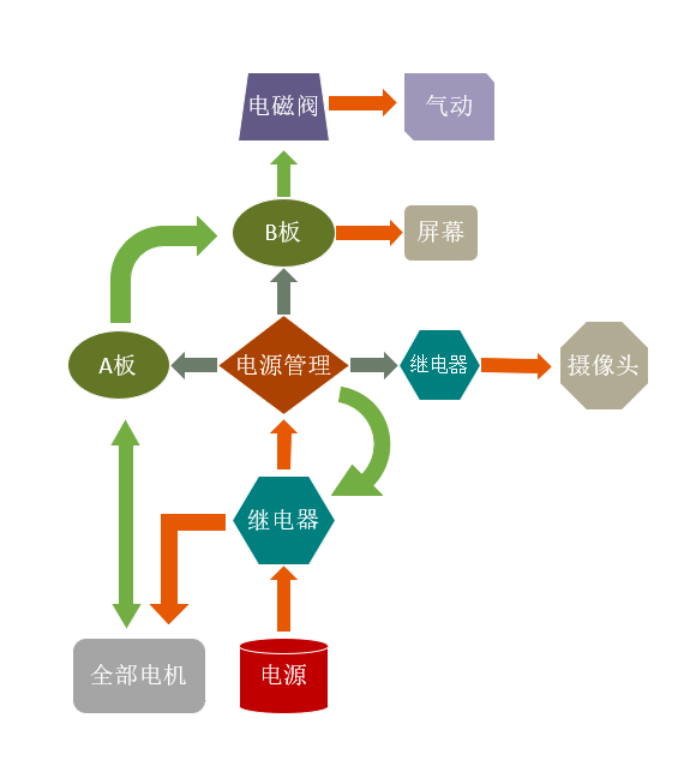
供电
- 电路动力系统供电(chassis口):给全车十三个电机供电
- A板主控供电(miniPC):保证在血量为零是整车运动停止但A板不断电的效果
- B板气路供电(gimbal口):在血量为零时,保证主要控制单元不断电的同时,结束所有气路运动
- 摄像头继电器供电(amor_booster口):通电的情况下,通过继电器切换视野,在血量为零时,摄像头及屏幕全部断电
嵌入式代码设计
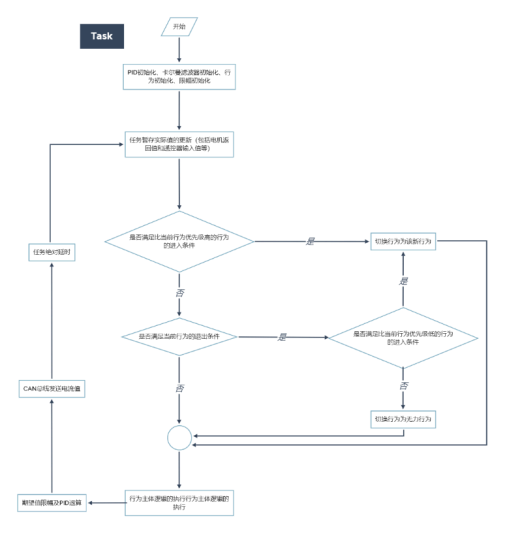
对于大多数任务来说,任务均由两组Source、Header文件构成,命名方法为XXX_Task和XXX_Behaviour
- XXX_Task:主要功能为该任务的初始化(执行且仅执行一次)、任务暂存实际值的更新、行为切换的判定与执行、行为主体逻辑的执行、PID运算、限幅、数据输出等
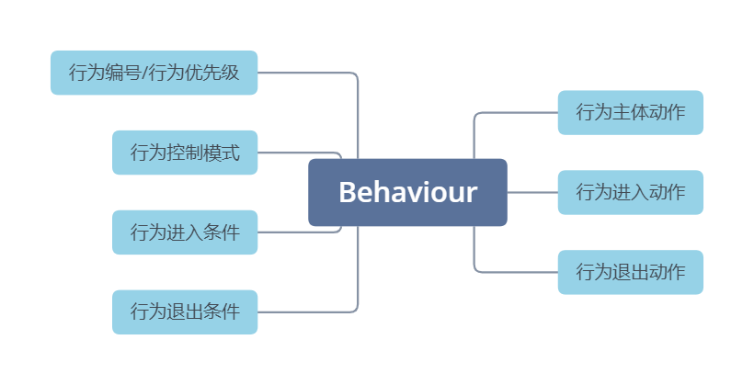
- XXX_Behaviour:为该任务正常运行时的应用层控制代码,任何用户输入值将在这里被处理并作为PID期望值通过指针输出
对于需要控制很多执行机构的工程机器人来说,单个功能的执行机构可能需要多个电机的配合,因此每个功能就需要一个类型的结构体(例如电机的控制可能是一个位置闭环一个电流闭环并且不同功能可能有不同的电机数)。
任务分类
地盘任务
夹取任务
矿仓任务
基本任务
救援任务
矿石旋转任务
视角切换任务
蜂鸣器任务

若有收获,就点个赞吧
0 人点赞
