不光车载终端,用户在使用任何带导航定位的终端时都会对其性能有一定的要求,如开机后多久能够获得定位结果?定位精度有多高?定位之后如果中断(如进入底下通道或隧道),出去多久之后可以再次重新定位?根据用户的这些性能要求,有不同的性能指标去衡量。主要测试指标包括首次定位时间、定位测速精度、失锁重捕时间、跟踪灵敏度、捕获灵敏度。
(1)首次定位时间(TTFF)
用于衡量接收机信号搜索过程的快慢程度,接收机的首次定位时间取决于初始状态,根据用户开机前的初始化条件,可分为冷启动首次定位时间、温启动首次定位时间和热启动首次定位时间,对于车载终端,一般测试冷、热启动的首次定位时间。3种初始化条件分别为:
● 冷启动:接收终端开机时,没有当前有效的历书、星历和本机概略位置信息。
● 温启动:接收终端开机时,没有当前有效的星历信息,但是有当前有效的历书和本机概略位置信息。
● 热启动:接收终端开机时,有当前有效的历书、星历和本机概略位置等信息。
(2)定位精度
是指接收终端在特定星座和星历条件下,接收卫星导航信号进行定位解算得到的位置与真实位置的接近程度,一般以水平定位精度和高程定位精度方式表示。测速精度是指接收卫星导航信号进行速度解算得到的速度与真实速度的接近程度。
所有的精度都是根据实际的测试数据使用某种统计学的方法出来的,根据选择的统计方法不同,计算的结果也会有很大的差异。常用的统计方法有均方根值(RMS)法和R95法。卫星导航接收机的水平定位精度均方根值为1.2m是指“使用测试数据统计得到,测量位置与真实位置之间水平误差的标准差为1.2m,也就意味着有约65%测量值与真实的误差在1.2m以内”。R95法意味这有约95%测量值与真实的误差在1.2m以内,R95法得到的精度值约为RMS法得到的精度值的1.7倍。因此,在了解精度量化数值的同时,必须要了解它是用何种统计方法描述的。
(3)失锁重捕时间
是指接收终端在丢失所接收信号状态下,从重新接收到信号开始,至终端设备输出符合定位精度要求的定位结果所需的时间。失锁重捕时间反映了在接收机信号失锁,定位中断后重新恢复定位的速度。失锁重捕时间短的接收机在易中断环境中(如隧道等)的定位性能好,因此失锁重捕时间可以有效评估车载终端的性能。
(4)跟踪灵敏度
是指被测设备在捕获信号后,能够保持稳定输出并符合定位精度要求的最小信号功率。评估的是接收机在已经定位的状态下,维持定位精度要求所需的最低接收功率。跟踪灵敏度是评估车载终端性能的关键指标之一。
(5)捕获灵敏度
是指接收机在失锁状态下,在规定时间内输出满足定位指标要求的最低接收信号功率。捕获灵敏度高的接收机有更强的捕获弱信号的能力,因此也是评估车载终端性能的重要指标之一。
用户提出性能指标主要是从体验的角度出发的,因此对不同的应用场景,用户最关注的指标不同。在常规驾驶车辆场景下,定位精度和捕获灵敏度对用户体验影响最大,而在紧急情况下触发定位报警时最关键的指标则是定位精度和跟踪灵敏度。所以,对于终端的导航定位性能测试,很多时候是针对终端使用场景定制测试项目。
从卫星信号的产生方式来划分,导航定位性能测试方法可以分为以下3类:
● 实验室测试,用卫星信号源模拟真实的卫星信号,这种测试方式场景可重现,应用较广泛。
● 实场测试,即利用天上真实的卫星信号进行测试,这种测试方式更贴近用户的真实体验,对车载终端的性能评估也很关键,但由于卫星信号受天气等各种因素影响,场景不可重现,且时间、经济成本较高,具有一定的局限性。
● 虚拟路测,通过卫星信号采集回放仪将卫星信号录制下来,在实验室中回放信号进行测试,这种方法兼具实验室测试和实场测试的优点;在这种方式中,如何保障卫星信号采集的完整性和回放的准确性是最大的挑战。
以上3种方式各有优劣,总体来说,虚拟路测是未来的发展趋势,带信道模拟的导航定位虚拟路测也已经开始研究。
从测试评估方式来划分,导航定位性能测试方法可以分为以下3类:
● 一定场景下的性能一致性测试,例如3GPP的A-GNSS测试都属于此类,测试终端在一定场景下(如在理想信号、多径环境、移动场景下等)能否满足要求,该测试只能得到终端通过还是不通过的结果,不能直接通过测试结果来评估终端之间的差异。
● 极限值测试,CTIA的空间射频接收机性能测试、国内检测机构(如定位总站)GNSS定位性能测试等都属于此类。这种方式会获得一个准确的数值,如定位精度是几米、捕获灵敏度是多少dBm等,这种方式的优势是能很直观地得到终端的性能,比较不同终端的性能差异;缺点是多次测试结果的一致性相对于第一类方法略差。
● 余量测试,介于以上两者之间的一种测试方式,基于3GPP定义的场景。首先测试该场景下是否通过,不断降低功率直到测试不通过,看最低能通过的功率与3GPP标准功率之间差异为多少,称之为“余量”。余量测试也可以反映用户在使用不同终端时的体验差异,目前通常用于厂家的定制化测试中。
射频性能测试是车载终端导航定位性能测试的一个基础部分。本文将以极限值测试方式为例,说明车载终端的GNSS射频性能测试方法。
5、车载导航定位射频性能测试方法
5.1、导航定位射频性能通用方法
用卫星信号源模拟卫星信号的车载导航定位性能测试系统如图1所示。多系统导航信号源用于模拟卫星信号,被测终端通过射频线与信号源连接,车载终端通过串口线反馈定位结果信息。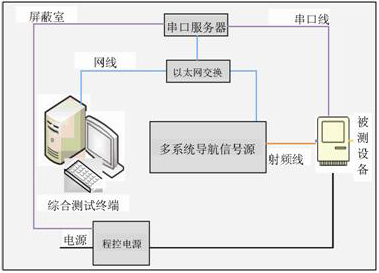
图1、车载导航定位射频性能测试系统
车载终端导航定位射频性能路测系统通过天线接收实际卫星信号进行测试,可以完成对天静态、对天动态性能实场测试,基于采集的卫星信号和记录的位置信息,可以进行虚拟路测。路测和虚拟路测系统如图2所示。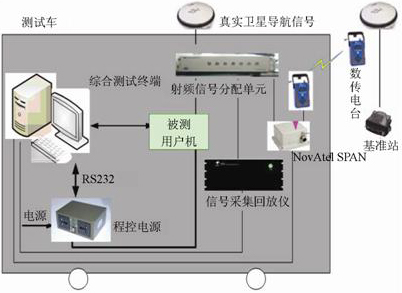
图2、车载导航定位射频性能路测和虚拟路测系统
不管采用实验室模拟测试、场测还是虚拟路测方式,车载导航定位射频性能测试项目都主要包括冷、热启动下首次定位时间、捕获灵敏度、跟踪灵敏度、失锁重捕时间、定位测速精度等。
基本测试方法与普通民用终端导航定位性能测试方法类似。另外,针对车载终端的应用场景,为了评估用户在使用时的体验性能,终端厂家一般还会增加一些车载特殊场景下定制化的定位测速精度。例如,起步场景(可以设置为静止120s,20s内匀加速到120km/h,然后保持匀速直线前进)、高速行驶场景(可以设置为保持速度为120km/h匀速直线运动)。
5.2、紧急情况下车载定位报警系统导航定位测试方法
对于紧急情况下车载定位报警系统导航定位测试,目前的测试系统一般采用图1的方式,测试项除了通用方法中提到的测试项之外,还有一些特殊测试项。以俄罗斯ERA GLONASS GOST 55534 标准为例,还包括检查定位结果信息输出格式是否符合NMEA-0183格式、自主完好性性检测算法(RAIM)、不同坐标系转换的能力(PE-90和WGS-84),以及谐波干扰、脉冲干扰下的抗干扰能力。
检查定位结果信息输出格式是否符合NMEA-0183格式,该测试项比较容易理解,NMEA-0183格式是目前国际上普遍使用的导航参数格式,参照NMEA 0183标准格式进行比对测试。
自主完整性检测算法(RAIM)是测试终端接收到故障卫星信号时,能否辨别出故障状态,并利用非故障卫星信号进行定位。
谐波干扰下的抗干扰测试是测试终端在谐波干扰下的定位性能是否满足一定要求。脉冲干扰下的抗干扰测试是测试终端在规定参数的脉冲信号干扰下,能否继续成功跟踪卫星信号。
总之,车载终端是导航定位终端的一个类别,其导航定位射频性能测试方法与普通终端有共同之处,也有针对其应用环境的特殊之处。其他类别的定位终端导航定位测试也是同理,根据其应使用环境定制合适的测试场景是有效评估其性能的关键。

若有收获,就点个赞吧
0 人点赞
