一、检索
有n组记录:(k, I),(k, I),……,(k, I)
给定关键码K,检索就是找到记录(k, I),是的k = K。
所以检索,就是查找定位。
1、检索已排序数组
顺序检索:挨个挨个找。
二分法检索。
字典检索/插值检索:根据被检索的关键码的分布知识,估算接下来往哪里找,比如“查字典”。
2、自组织线性表
记录的访问概率随着时间变化,自组织线性表就是为了解决这些问题。
每访问一次记录,自组织线性表就会适当地修改记录顺序,这种就叫启发式,常见的启发式规则:
1、计数法:为每个记录保存访问次数,类似“LFU”最不频繁使用法,但是这并不能体现访问概率随着时间变化,因为计数法认为访问多的以后一直也访问多。
2、移至前端法:访问了一次就排在最前面。类似LRU,最近最少使用法。
3、转置transpose:被访问一次,记录就和前一条记录交换位置。
3、集合的检索
确定记录是否在集合中。
位向量bit vector、位图bitmap:有bit来表示是否存在。
集合A - B 等价于 A & ~B
签名文件:signature file,用一个bit vecot来表示文件文档中出现的关键字。
4、散列方法
根据关键码值,直接访问表。
散列hashing,把key映射到表的位置,来访问记录。它的函数叫散列函数hash function,h表示,存放的记录叫散列表(hash table,HT)。散列表的一个位置称为槽slot,槽数量用M表示,则散列就是:
对于任意关键码值K,有 0 <= h(K) <= M,HT[ i ] = K
使用于集合,不适用于范围搜索,最适合“如果有的话,哪条记录的关键码是K”
把记录映射到槽,越均匀越好,就是每个槽概率相同,也就是散列冲突概率最小。
散列冲突,就是h(K) == h(K)。
关键码值的分布直接影响散列函数的设计。
//散列函数例子//散列效果很差,因为只考虑了x的低4bit,这样很容易导致散列冲突。//此时M = 16,所以M的大小对散列的好坏也很关键。int h(int x){return (x % 16);}//这是个很好的字符串散列函数int h(char *x){int i, sum;for(sum = 0, i = 0; x[i] != '\0'; i++)sum += (int)x[i]return (sum % i);}//更好的字符串散列函数,ELFhash//适合任意长的字符串,效果都很好,每个字符的作用都相同。int ELFhash( char* key){unsigned long h = 0;while(*key){h = (h << 4) + *key++;unsigned long g = h & 0xF0000000L;if(g) h ^= g >> 24;h &= ~g;}return h % M;}
散列冲突解决:开散列方法
散列冲突解决:开散列方法(单链方法)和闭散列方法(开地址方法)。
开散列方法:冲突记录存储在表外。
闭散列方法:冲突记录存储在表内另一个槽。
每个槽定义为链表表头,每个槽存储一条记录和一个指向链表其余部分的指针。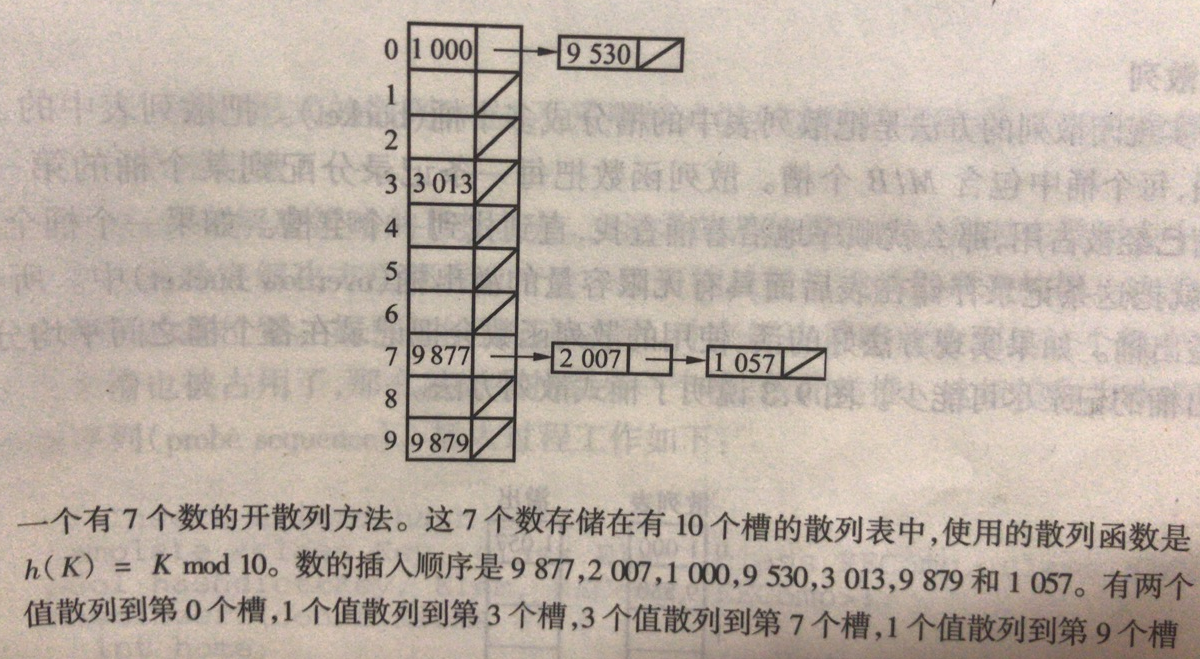
散列表放在主存中,链表也在主存中,用开散列方法最合适。如果是在磁盘,会有多次I/O,抵消了散列优势。
散列冲突解决:闭散列方法
桶式散列:“物理数组”
M个槽,分到B个桶里。还有一个溢出桶,无限容量。先往桶里插,满了都插入到溢出桶。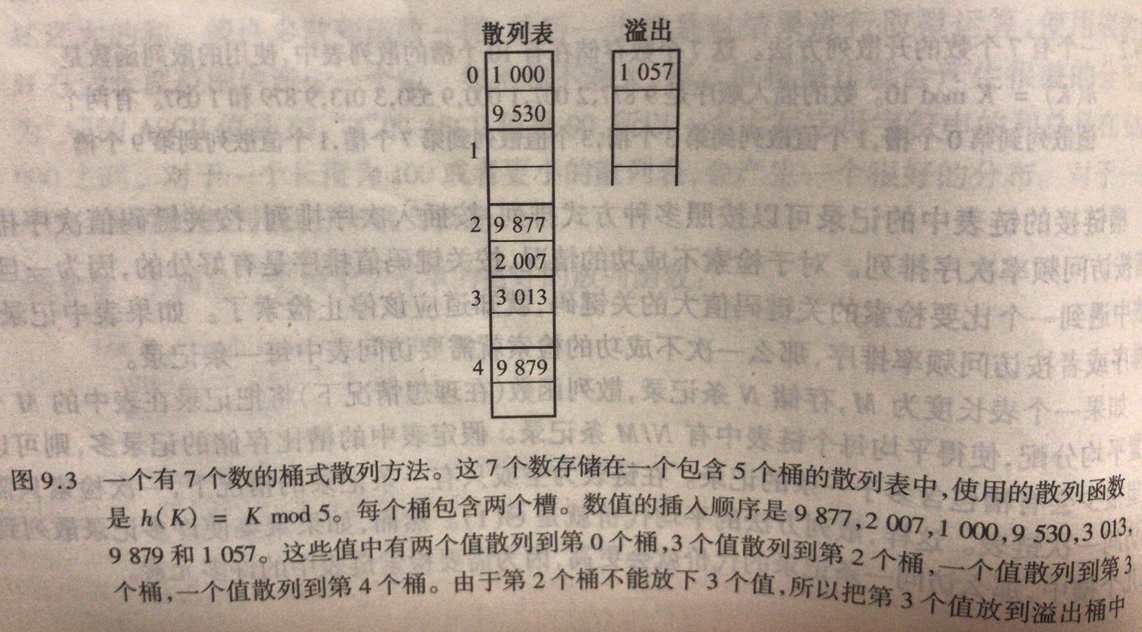
改进:把关键码散列到基位置,就像没有桶一样,然后在所在桶遍历,是否有空槽。如一条记录散列到slot 5,桶大小为8,第一个桶包含0~7个槽,则冲突解决过程就是:5、6、7、0、1、2、3、4。
非常适合磁盘散列,把桶设置为block大小,桶满了才进行IO操作。
线性探查:“逻辑数组”
冲突解决的过程就是在找下一个槽,可以想象成有一个“逻辑数组”包含所有的槽,这个数组的首位置是散列的基位置home,下一个位置是home+offset,而offset = p(k,i),k是关键码值,i是这个逻辑数组的第几个槽。如home的下一个位置就是home + p(k, 1)。
上面的这个函数就叫probe function探查函数。简单的探查函数可以是:
p(K, i) = i
home:基位置(散列值)
pos:可以插入的槽位置
K:关键值码
i:偏移home的第 i 个槽
p(K, i):探查函数
M:槽数量
散列值为home的记录K的插槽位置是:
pos = (home + p(K, i)) % M
从这个等式我们知道,探查函数是根本。
template<class Key, class Elem, class KEComp, class EEComp>bool hashInsert(const Elem& e){int home;int pos = home = h(getkey(e));//找到“逻辑数组”的第一个空位置for(int i = 1; !(EEComp::eq(EMPTY, HT[pos])); i++){pos = (home + p(getkey(e), i)) % M; //pos位置不空,就找下一个位置。if(EEComp::eq(e, HT[pos])) return false; //记录相同冲突,就不插入了。}HT[pos] = e; // 找到了第一个空位置。return true;}//hash查找是否有K的记录,//按照上面线性探查的理解,就是从头遍历“逻辑数组”查找,找到返回记录的值。bool hashsearch(const Key& K, Elem& e) const{int home;int pos = home = h(K);for(int i = 1; !KEComp::eq(K, HT[pos]) && !EEComp::eq(EMPTY, HT[pos]); i++)pos = (home + p(K, i)) % M;if(KEComp::eq(K, HT[pos])){e = HT[pos];return true;}return false;}
线性探查散列不均匀问题
可能散列不均匀!,每个槽的散列概率不均匀。这个问题叫基本聚集primary clustering。如下图:
探查函数p(K, i) = i。
造成问题的本质原因是因为两个不同的K,探查序列相同,就和散列相同是相类似的效果,应该要让不同的K,产生的探查序列也不同。更术语的话就是探查函数p的变量太少。改进的过程其实就是改进探查函数的过程。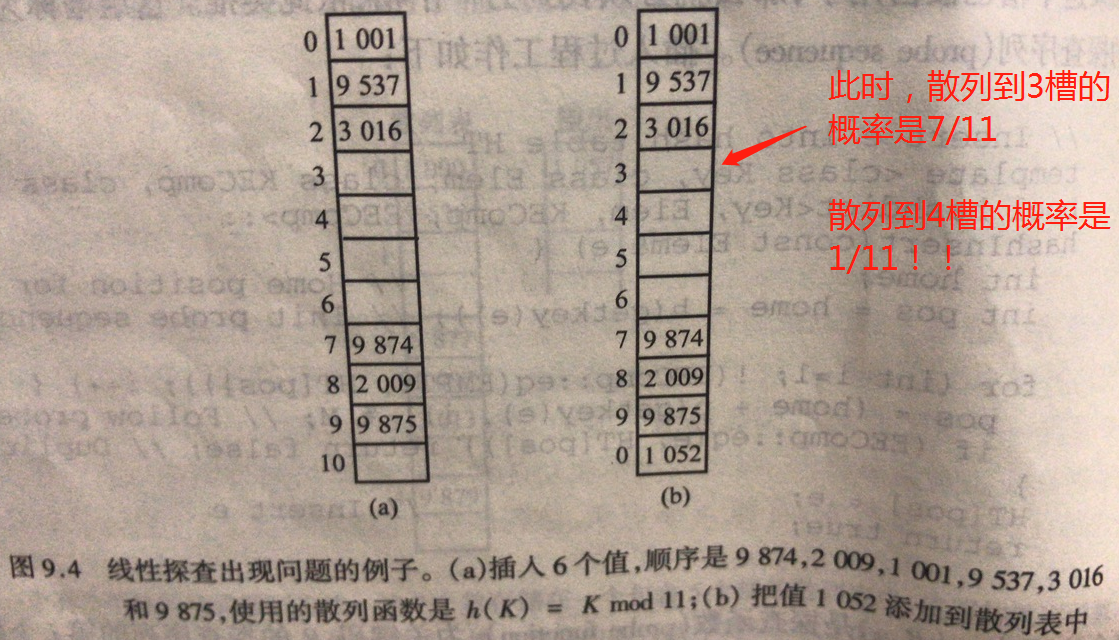
方法一:伪随机探查
p(K, i) = Perm[i - 1]
Perm是一个数组,长度M - 1,保存的是1~M-1数的随机排列。
方法二:二次探查
p(K, i) = i
方法一二还是有问题,因为没有引入K变量,导致如果K相同,home起点就相同,探查序列就完全相同。
方法三:双散列法
p(K, i) = i * h(K)
字典ADT(散列表实现)
template<class Key, class Elem, class KEComp, class EEComp>class hashdict : public Dictionary<Key, Elem, KEComp, EEComp>{private:Elem* HT; //哈希表HT(数组)int M; //slot的总数量,HT的sizeint currcnt; //HT当前的元素数量Elem EMPTY; //用户自定义一个空值。int p(Key k, int i) const { return i }; //线性探查的探查函数int h(int x) const { return x % M }; //整形的散列函数int h(char* x) const; //字符串的散列函数bool hashInsert(const Elem&); //哈希插入bool hashSearch(const Key &, Elem&) const; //哈希查找public:hashdict(int sz, Elem e);~hashdict();void clear(); //清空字典bool insert(const Elem& e); //插入元素bool remove(const Key& K, Elem& e); //删除K的元素,保存到ebool removeAny(Elem& e); //删除HT表中第一个非空元素bool find(const Key& K, Elem& e) const; //查找K值的元素int size(); //字典当前元素数量//以下是函数实现private:int h(char* x) const { //前面例子中的字符串散列桉树int i, sum;for(sum = 0;i = 0; x[i] != '\0'; i++)sum += (int) x[i];return (sum % M);}public:hashdict(int sz, Elem selfDefineEmpty){M = sz;EMPTY = e;currcnt = 0;HT = new Elem[sz];for(int i = 0; i < M; i++) HT[i] = EMPTY;}~hashdict(){ delete[] HT; }void clear(){for(int i = 0; i < M; i++) HT[i] = EMPTY;currcnt = 0;}bool insert(const Elem& e){if(currcnt == M) return false;if(hashInsert(e)){currcnt++;return true;}else return false;}bool remove(const Key& K, Elem& e){}bool removeAny(Elem& e){ // 删除HT表中第一个非空元素for(int i = 0; i < M; i++){if(!EEComp::eq(EMPTY, HT[i])){e = HT[i];HT[i] = EMPTY;currcnt--;return true;}}return false;}bool find(const Key& K, Elem& e) const{return hashSearch(K, e);}int size(){return currcnt;}}
闭散列方法性能分析
插入、检索不成功的代价相同(访问次数)。
删除、检索成功的代价相同(访问次数)。
负载因子α = N / M,N是记录数,M是HT大小,反应填充程度,越大,散列冲突越可能。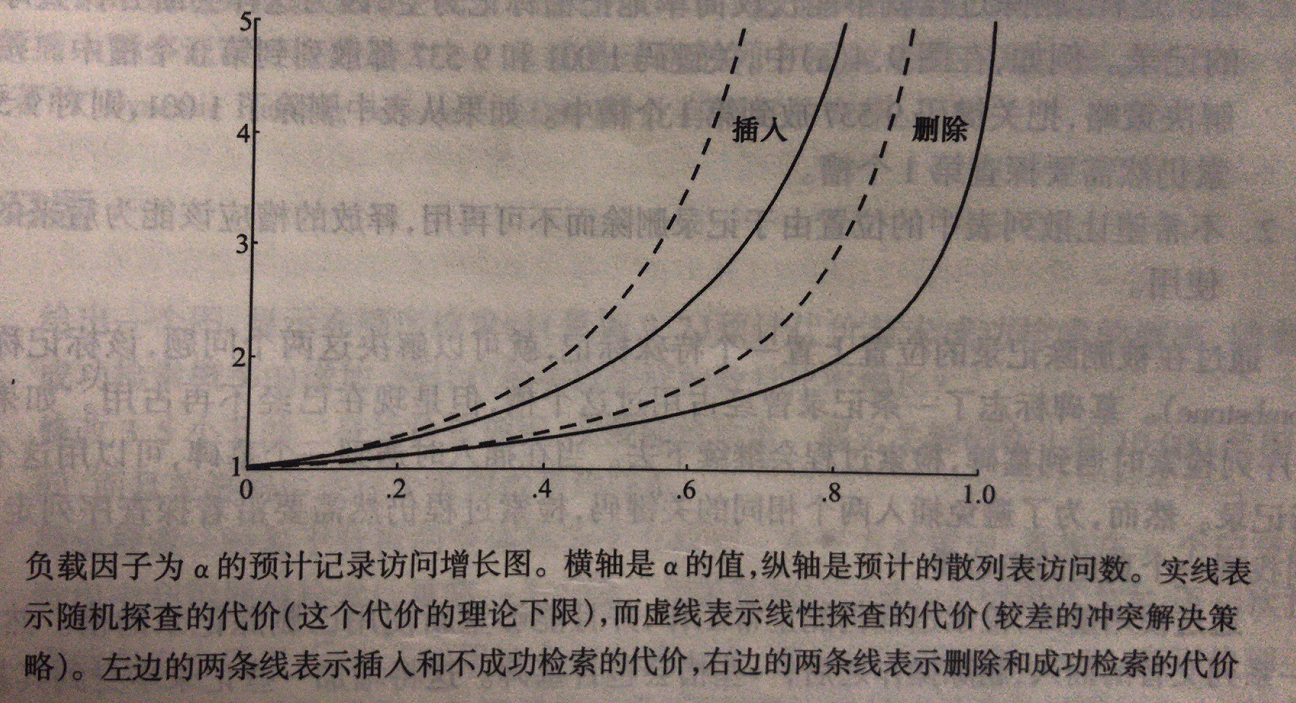
线性探查比随机探查,代价增长更快
删除和不成功检索的代价增长更快。
散列表半满之前,性能都非常好,超过之后,性能急剧下降。α=0.5最好。
改进优化
1、每当检索到记录不在基位置,就把基位置和前一条记录交换。
2、删除一条记录时,注意:
1、不能影响后续检索,就是你这里空了,不代表继续探查下去就没有了。
2、删除后槽要能继续使用。
解决办法:被删除槽置一个标记(墓碑tombstone),查找的时候检索到了,还有继续往下检索。插入的时候检索到了,可以插入记录,并取消标记。
但是随时使用次数增加,墓碑增多,探查序列也会变长,考虑解决办法:
1、删除一条记录,局部重组:后面记录交换到此槽上。
2、定时重组:把记录全部重新插入到散列表。
二、索引技术
散列擅长解决:
插入
删除
查找单个记录
散列不擅长:
范围查找(关键码值是一个范围)
输入顺序文件:按记录进入系统的顺序,把记录存储在磁盘中。
索引:indexing,把一个关键码与数据记录位置相关联的过程。
索引文件:[关键码值,记录指针],指向记录在文件中的位置,通过指针可以直接访问到记录。
主码:primary key,记录唯一标识。
主码索引:[主码,记录指针],指向记录在文件中的位置,通过指针可以直接访问到记录。
辅码:secondary key,不能唯一标识,不同记录辅码可能相同。
辅码索引:[辅码,主码],如[工资,ID]。
1、线性索引
索引文件内容是:【关键码值,指针】线性存储,指针可能是指向记录位置(即可以直接访问记录),也可能是指向主码位置(在主码索引文件中的位置)。
索引是单一的一个文件,不便于数据更新。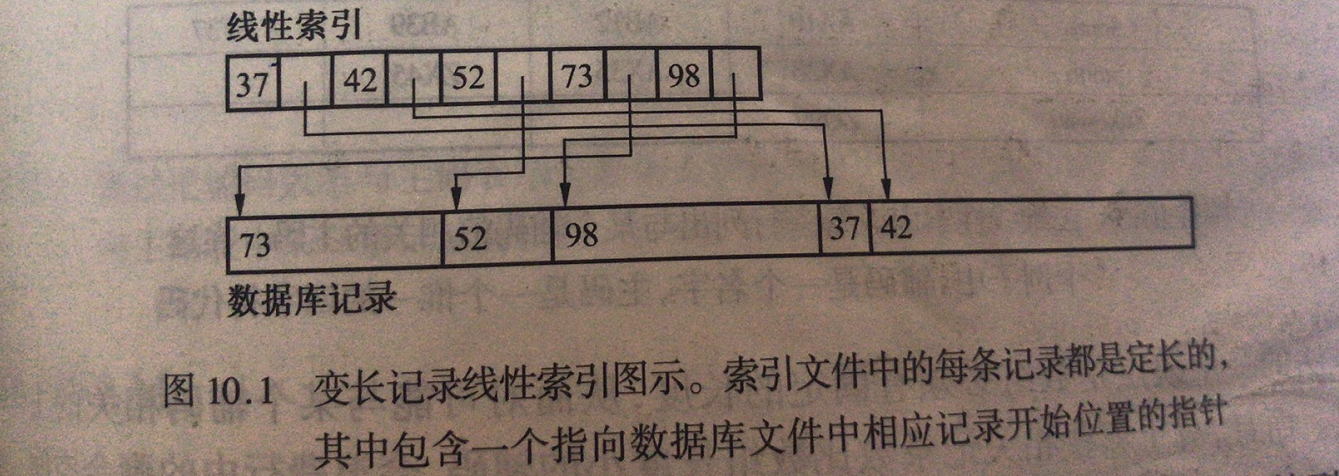
问题:记录太多,索引文件也会很大。
1.1 二级索引
记录太多,索引文件也很大,就针对索引文件再来个索引,索引文件在磁盘中,二级索引在主存中。二级索引文件内容可以是:[每次磁盘块的首个关键码值],这样可以直接读取这个索引文件块到主存中。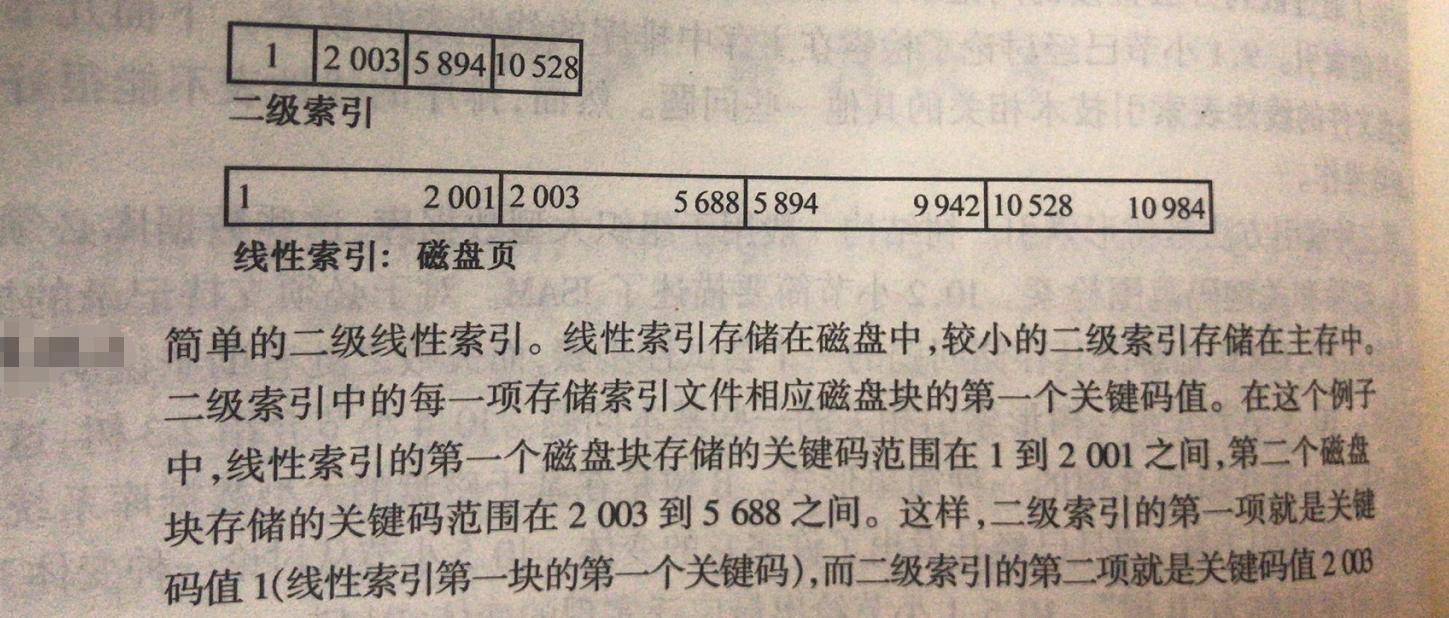
缺点:
插入删除记录,因为是数组,很多索引记录要移动。
相同辅码值的多条不同记录,对应也有相同多个索引记录,辅码字段占空间。
1.2 二维线性索引
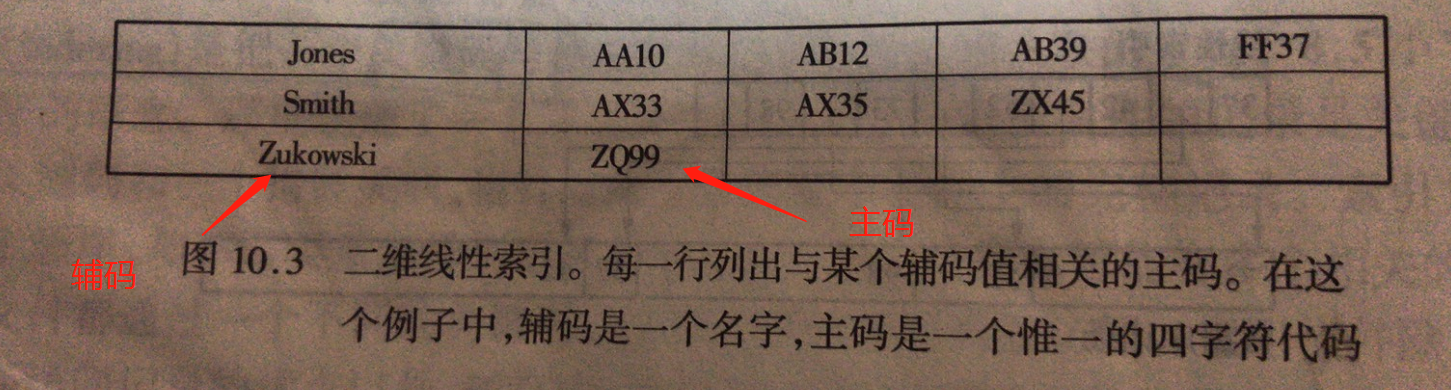
缺点:辅码相关联的主码可能没那么多,造成主码字段空间的浪费。
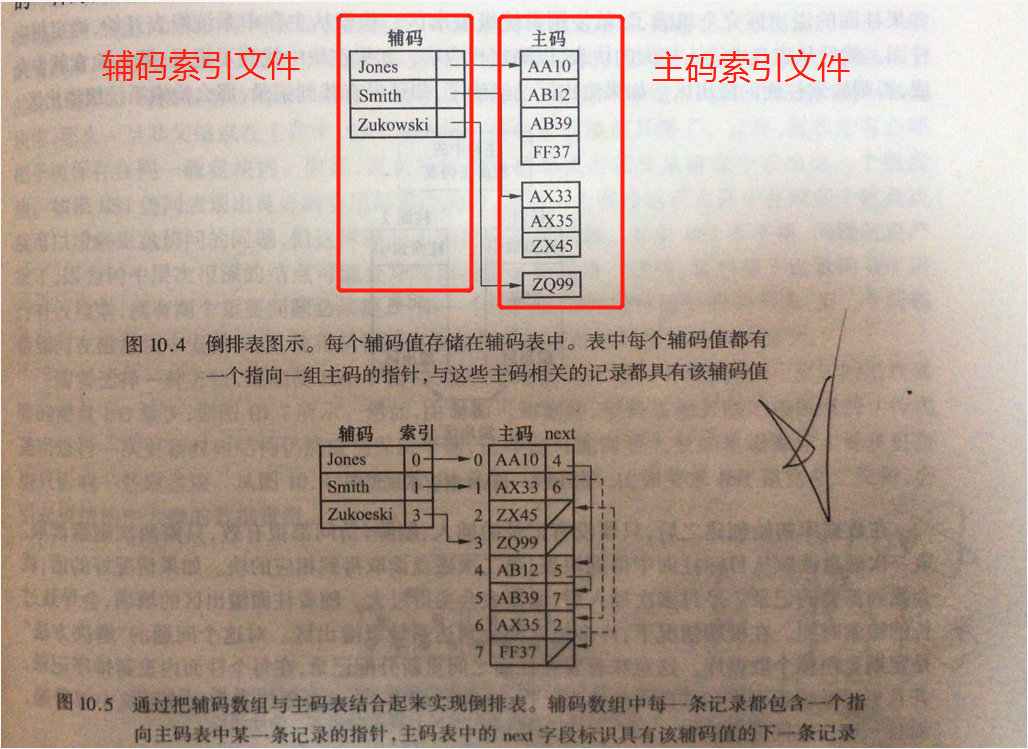
1.3 倒排表
2、ISAM(线性索引改进)
把索引文件分割成多个文件。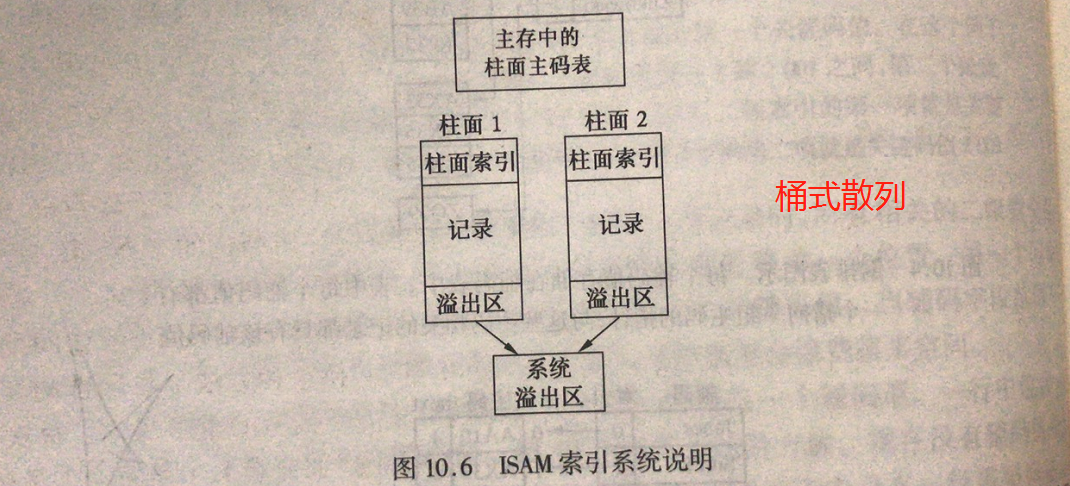
针对有限次插入删除,很有效。
问题:时间就了,系统溢出区数据增多,检索变慢。
解决:定期重新索引。
3、树形索引
十二、线性表和数组高级技术
十三、高级树结构
十四、分析技术
十六、计算限制

若有收获,就点个赞吧
0 人点赞
