1、主存储器、辅助存储器
主存储器,main/primary memory,一般指随机访问存储器(RAM,Random Acess Memory)、高速缓存(cache)、视频存储器(video memory)。数据易失的(volatile),断电丢失,访问速度快。
辅助存储器,secondary/peripheral storage,一般指硬盘、软盘、磁带。数据永久(persistant),可移动,访问速度比主存慢100w倍。
2、磁盘
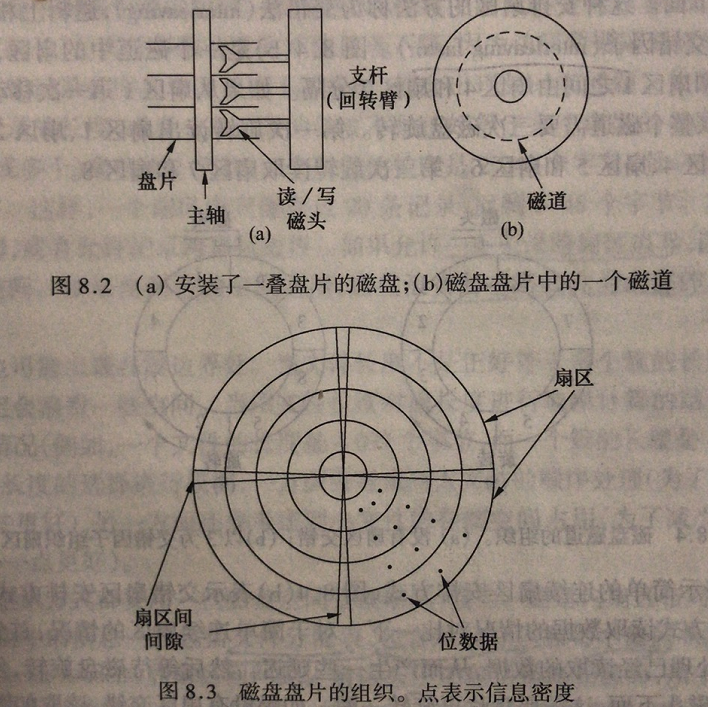
各个盘片的相同距离磁道形成柱面。
扇区是I/O基本单位,注意,扇区指的是一部分磁道,不是整个扇区内的全部磁道。就比如图中,箭头指向的是线上,一般1K~16K字节。
CD-ROM(光盘,碟子),单一的螺旋磁道,磁道数据均匀分布,I/O磁头向中心移动,必须减慢旋转速度,机制复杂且更慢。
硬盘读取数据过程:
1、寻道(seek),移动I/O磁头,定位到磁道,主要耗时。
2、磁头等待扇区到来(旋转延迟),磁盘转速3600、5400、7200转/min
3、读取一个扇区数据。
交错法:读取个扇区,计算机要处理固定时间t,这个时候磁盘已转了一段距离,所以数据最好不要连续存储,而是隔一段距离,可以让计算刚处理好数据后,下一个扇区刚好转到磁头下,这种扇区安排方法称为交错法(interleaving),逻辑上相邻的扇区之间的间隔称为交错因子(interleaving facotr)。如下图:
数字表示扇区的逻辑关系,就是连续的数据。1和2之间相差3,所以交错因子是3。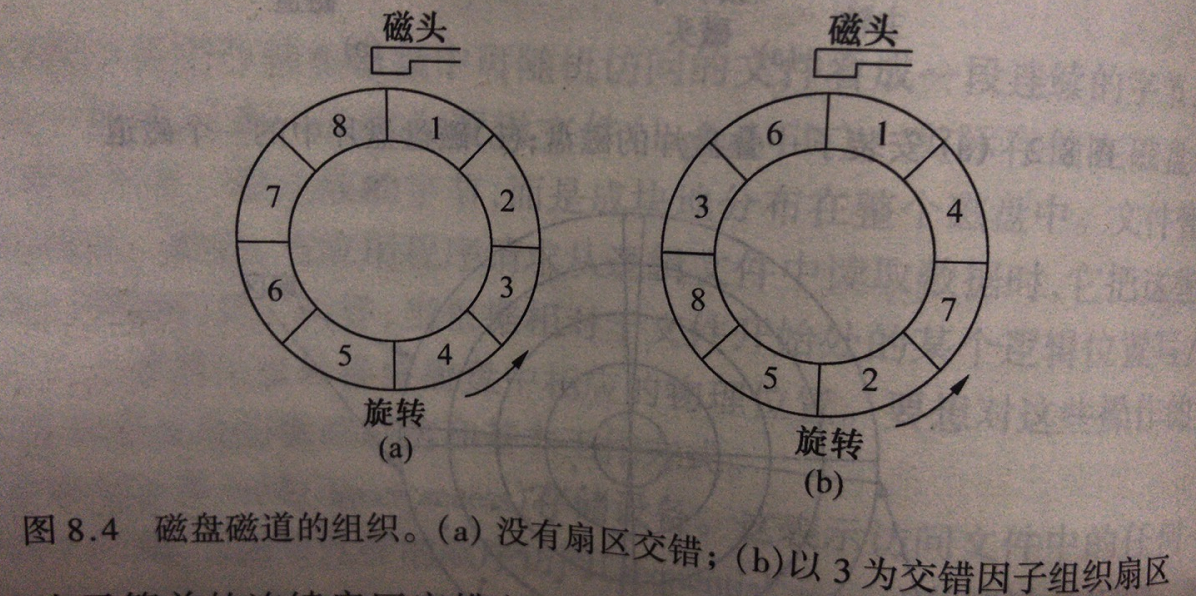
window文件:多个扇区集结成一个簇(cluster),它是文件最小分配单位,所以所有文件都是整数个cluster,大小由操作系统决定,文件管理器记录每个文件有哪些cluster。
UNIX文件:没有cluster,最小单位就是扇区(称为block,块),UNIX系统维护文件信息,记录文件有哪些block,称为索引节点。
逻辑上和物理上都相邻的cluster称为范围extent,就是同一个文件数据,而且连续地存储在磁盘上。
数据可能不会刚好铺满扇区,空出来的就是内部碎片(interal fragmentation)。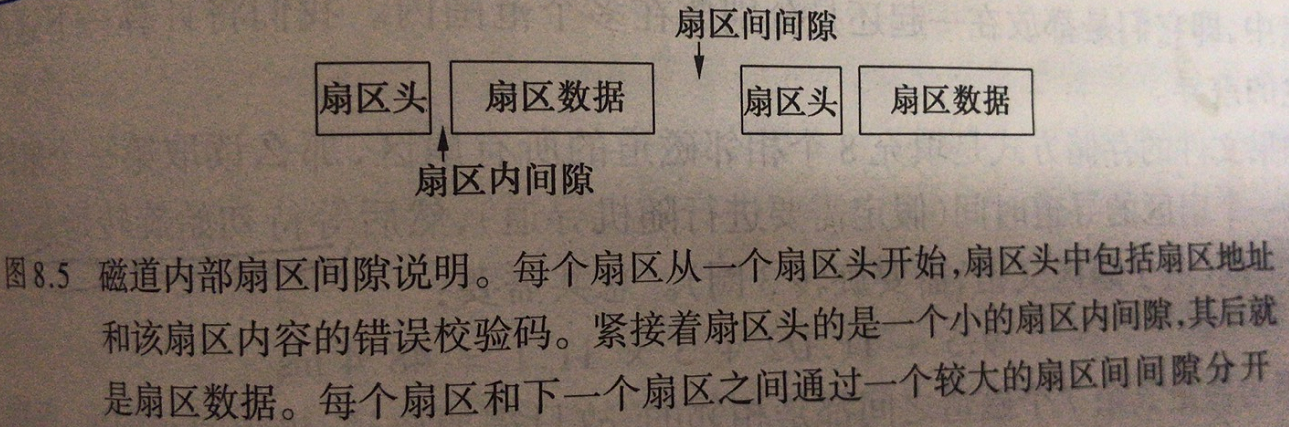
有扇区头、内部碎片,导致磁盘空间有“名义大小”和“实际大小”。
3、缓冲区、缓冲池
一般按扇区读取,如果只需要1byte数据又读取了一个扇区,这个扇区就作为“缓冲”存储在主存中。叫引用的局部性,这是计算机重要概念。
缓冲由磁盘控制器管理,独立于CPU,因为CPU比这快多了,别拖累。
把缓冲作为用户和中介的过程叫缓冲文件,一个缓冲区内的信息叫page(页),合起来叫缓冲池(buffer pool)。缓冲满了要决策抛弃哪些信息:
1、FIFO,缓冲区是一个队列,缓冲时间最长的被踢掉。
2、LFU,最不频繁使用,记录每个缓冲区的访问次数。
3、LRU,最近最少使用。缓冲区是链表,被访问一次就把信息放到表头。
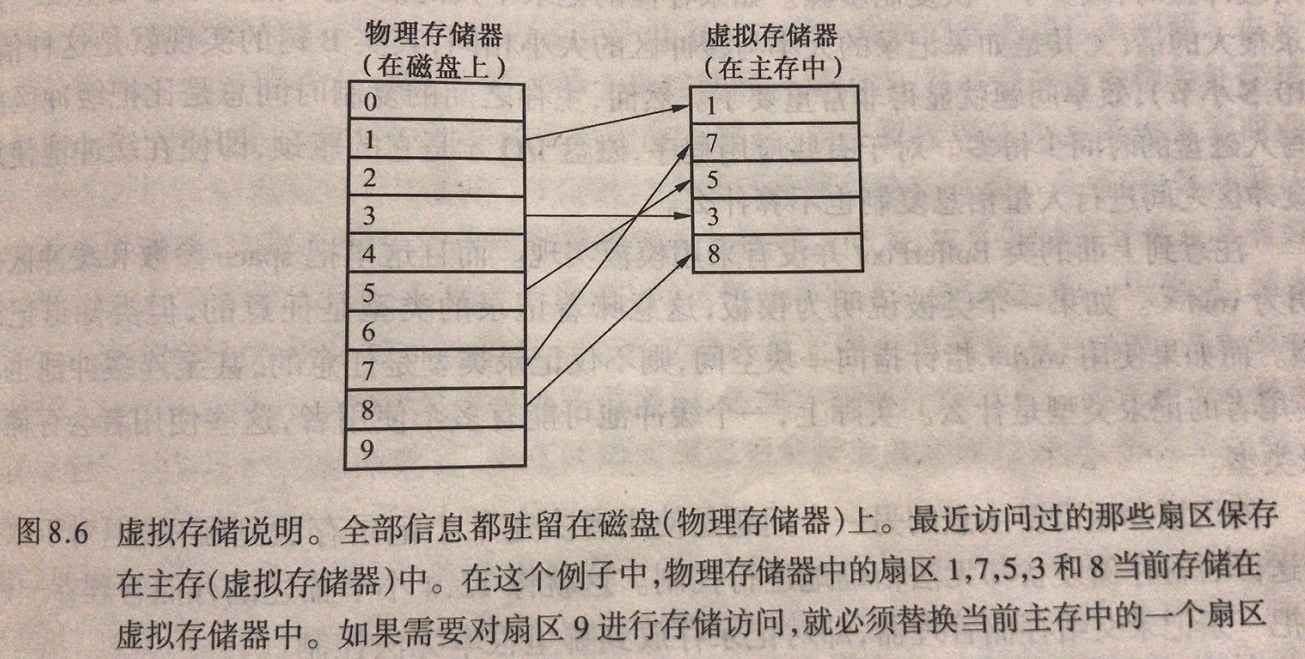
虚拟存储
缓冲池抽象
//缓冲池抽象方法一:这个用起来简单安全,但是需要从缓冲区复制出来,不过主存的复制至少比磁盘的快得多。class BufferPool{public://把space上pos开始的size个字节数据缓冲起来virtual void insert(void* space, int size, int pos) = 0;//从缓冲中pos开始读取size个字节到space中。virtual void* getbytes(void *space, int size, int pos) = 0;}//缓冲池抽象方法二:这个是直接提供缓冲访问权限,省了复制出来,但是用起来麻烦,而且危险,class BufferPool{public://返回需要请求的block在缓冲中的指针virtual void* getbolck(int block) = 0;//缓冲区中block块已经被修改,缓冲池才能及时的更新到存储区中。virtual void dirtyblock(int block) = 0;//块大小,缓冲区大小。virtual int blocksize() = 0;}
4、文件抽象 fstream
文件可以类比成线性表,当前访问位置就是“栅栏”位置,读取一次,访问位置移动。有两个“栅栏”:一个读入位置,一个写入位置。
C++操作二进制文件的工具。
open:打开文件
read:当前位置读入文件,read一次,“栅栏”会移动。
write:写入,类似read。
seekg、seekp:前者移动读入“栅栏”,后者移动写入“栅栏”,
close:关闭文件。
5、外部排序
记录数量太大,无法全部存储到主存。“大规模排序”。
磁盘访问要比CPU计算满得多,所以尽量少磁盘访问。
算法使用的块最好是扇区的整数倍。
索引文件index file
如果是直接读取数据记录,但就造成了大量的I/O操作,而且大部分信息又用不上,没必要。可以通过保存每条记录的关键码和指针(指向对应数据记录的文件位置)。这样排序算法只需对索引文件进行排序即可。可以用多个索引文件按照不同的关键码,如按照ID号排序,按照工资高低排序等。

若有收获,就点个赞吧
0 人点赞
