- 一、最短路径分析:
- 二、数据结构
- 三、算法
- 四、如下场景,找1到6的最短距离
- 五、网格地图中的启发式算法
标准的启发式函数是曼哈顿距离(Manhattan distance)">5.1 曼哈顿距离
标准的启发式函数是曼哈顿距离(Manhattan distance)- 5.2 对角线距离
- 5.3 欧几里得距离
- 5.4 平方后的欧几里得距离
一、最短路径分析:
像 Google 地图。百度地图、高德地图这样的地图软件,应该会经常使用吧?如果从家开到公司,你只需要输入起始地址、结束地址,地图就会给你规划一条最优路线。这里的最优,有很多种定义,比如最短路线、最少用时路线、最少红灯路线等等。作为一名软件开发工程师,你是否想过,地图软件的最优路线是如何计算出来的吗?底层依赖了什么算法?
二、数据结构
解决软件开发中的实际问题,最重要的一点是建模,也就是将复杂的场景抽象成具体的数据结构。针对这个问题,我们该如何抽象成数据结构呢?
我们之前也提到过,图这种结构的表达能力很强,显然,把地图抽象成图最合适不过了。我们把每个岔路口看作一个顶点,岔路口与岔路口之间的路看作一条边,路的长度就是边的权重。如果路是单行道,我们就在两个顶点之间画一条有向边;如果路是双行道,我们就在两顶点之间画两条方向不同的边。这样,整个地图就被抽象成一个有向有权图。
三、算法
最出名的莫过于Dijkstra(迪杰斯特拉)算法了,
我们用vertexes 数组,记录从起始顶点到每个距离(dist)。起初,我们把所有顶点的dist都初始化为无穷大。我们把起始顶点的dist值初始化为0,类似于贪心思想+优先队列(堆)来解决。
我们从优先队列中取出dist最小的顶点minVertex,然后考察这个顶点可达的所有顶点(nextVertex)。如果minVertex的dist值加上minVertex与nextVerte之间边的权重w小于nextVertex 当前的dist值,也就是说,存在另一条理短的路径,它经过minVertex到达nextVertex。那我们就把nextVertex的dist更新为ninVertex的dist值加上w。然后,我们把nextVertex加入到优先级队列中。重复这个过程,直到找到顶点 t 或者队列为空。
以上就是dijkstras 算法 核心逻辑。除此之外,代码中还有两个额外的变量,predecessor数组和 inqueue数组。predecessor 数组的作用是为了还原最短路径,它记录每个顶点的前驱节点。最后通过递归的方式,将这个路径打印出来。
inqueue数组是为了避免将一个顶点多次添加到优先级队列中。我们更新了某个顶点dist值之后,如果这个顶点已经在优先级队列中了,就不要再将它重复添加进去了。[
](https://blog.csdn.net/every__day/article/details/88633171)
虽然地图很大,但是两点之间的最短路径或者说较好的出行路径,并不会很“发散”,只会出现在两点之间和两点附近的区块内。所以我们可以在整个大地图上,划出一个小区块,这个小区块恰好可以覆盖住两个点,但又不会很大。我们只需要在这个小区块内部运行Dijkstra算法,这样就可以避免遍历整个大图,也就大大提高了执行效率。
不过你你可能会说了,如果两点距离比较远,从北京海淀区某个地点,到上海黄浦区某个地点,那上面的这种处理方法,显然就不工作了,毕竟覆盖北京和上海的区块并不小。
对于这样两点之间的距离较远的路线规划,我们可以氢北京海淀区或者北京看作一个顶点,把上海黄浦区或者上海看作一个顶点,先规划大的出行路线。比如从北京到上海,必须要经过某几个顶点,或者某几条干道,然后再细化每个阶段的小路线。
这样,最短路径问题就解决了。我们再来看另外两个问题,最少时间和最少红灯。
前面讲最短路径的时候,每条边的权重是路的长度。在计算最少时间的时候,算法还是不变,我们只需要把边的权重,从路的长度变成经过这段路所需要的时间。不过,这个时间会根据拥堵情况时刻变化。如何计算车通过一段路的时间呢?这是一个蛮有意思的问题,你可以自己思考下。
每经过一条边,就要经过一个红绿灯。关于最少红绿灯的出行方案,实际上,我们只需要把每条边的权值改为1即可,算法还是不变,可以继续使用前面讲的Dijkstra算法。不过,边的权值为1,也就相当于无权图了,我们还可以使用之前讲过的广度优先搜索算法。因为我们前面讲过,广度优先搜索算法计算出来的两点之间的路径,就是两点的最短路径。
不过,这里给出的所有方案都非常粗糙,地图软件用的更多是类似 A* 启发式搜索算法,不过也是在 Dijkstra算法上的优化罢了。
四、如下场景,找1到6的最短距离

五、网格地图中的启发式算法
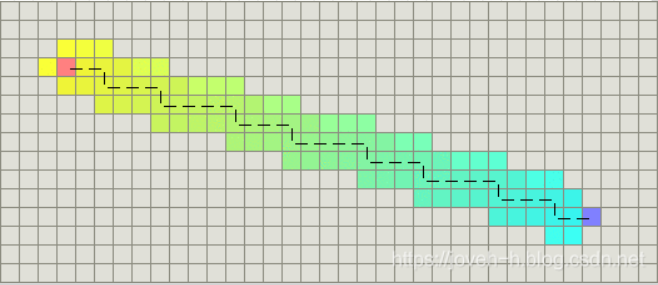
5.1 曼哈顿距离
标准的启发式函数是曼哈顿距离(Manhattan distance)
考虑代价函数并找到从一个位置移动到邻近位置的 最小代价D
曼哈顿距离——两点在南北方向上的距离加上在东西方向上的距离
即 D(I,J)= |XI - XJ| + |YI - YJ|
因此,启发式函数应该是曼哈顿距离的D倍:
H(n) = D * (abs ( n.x – goal.x ) + abs ( n.y – goal.y ) )
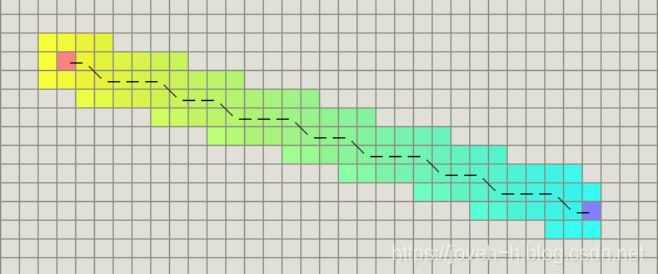
5.2 对角线距离
如果在地图中允许对角运动,那么需要一个不同的启发函数
(4 east, 4 north)的曼哈顿距离将变成8 D,然而可以简单地移动(4 northeast)代替
所以启发函数应该是4 D
假设直线和对角线的代价都是D:
h(n) = D * max(abs(n.x - goal.x), abs(n.y - goal.y))
5.3 欧几里得距离
然而,如果是这样的话,直接使用A 时将会遇到麻烦
因为代价函数g ( n ) g(n)g(n)不会匹配启发函数h ( n ) h(n)h(n)
因为欧几里得距离比曼哈顿距离和对角线距离都短
仍可以得到最短路径,不过A将运行得更久一些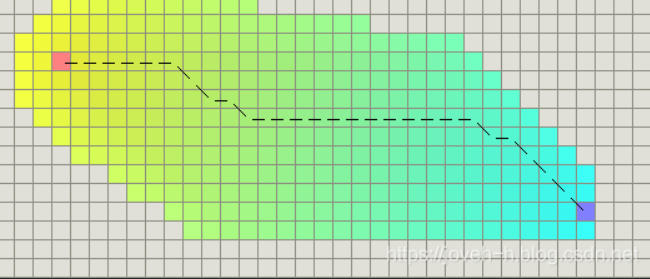
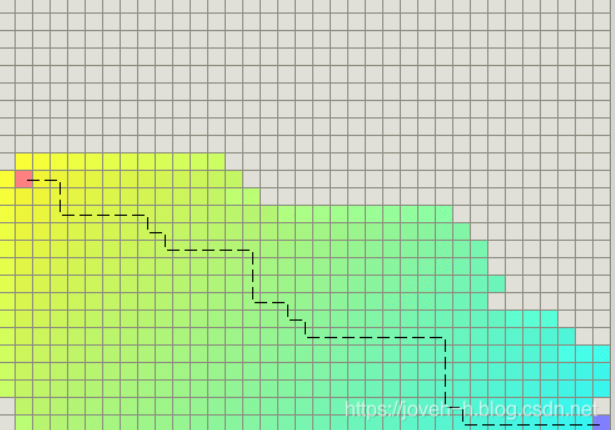
5.4 平方后的欧几里得距离
 [
[
](https://blog.csdn.net/every__day/article/details/88633171)

若有收获,就点个赞吧
0 人点赞
